98.5mm from servo axis to wing leading edge.
Ok, Thanks, I think I’ll leave it more or less the same. It convinces me more than to extend it 1 inch.
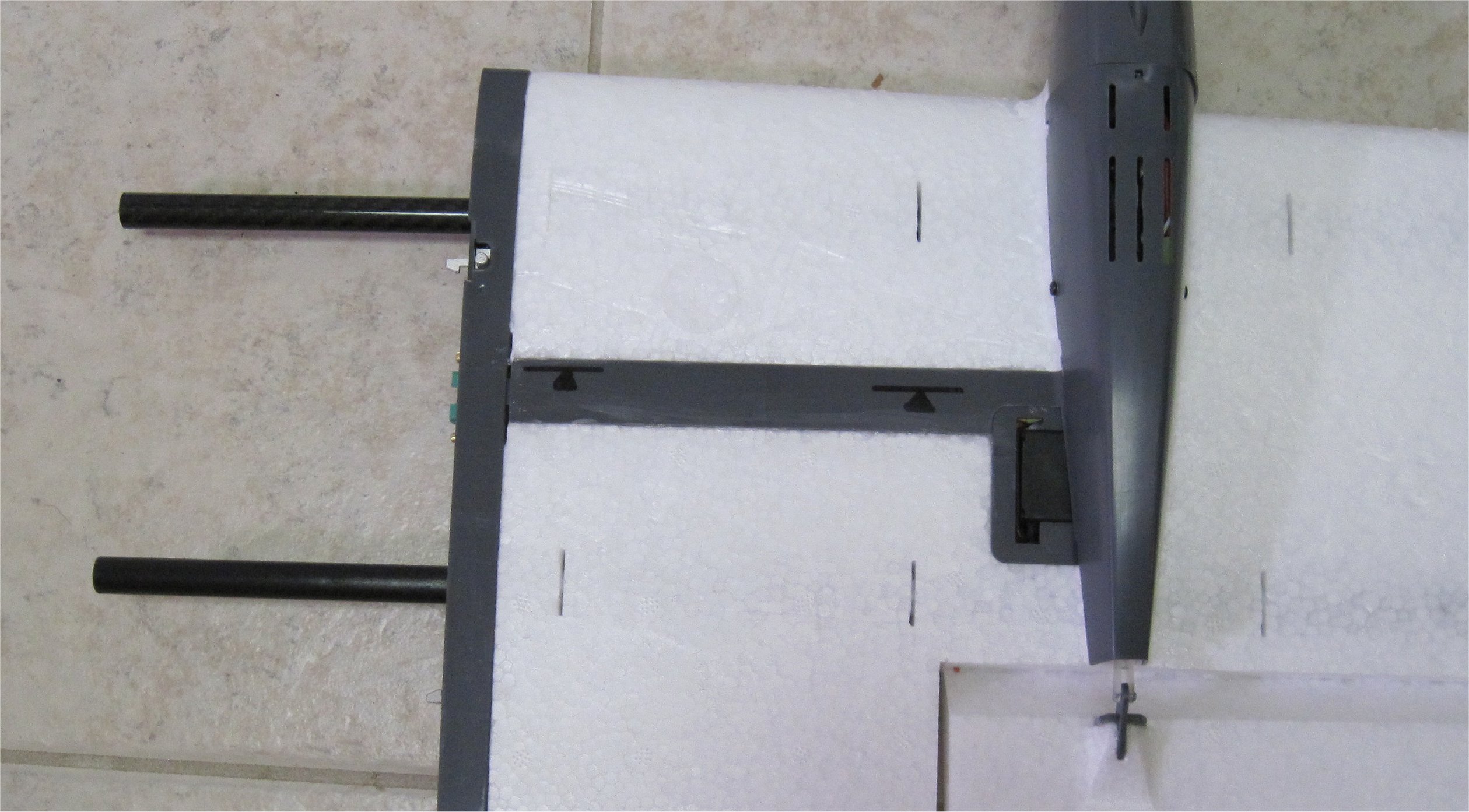
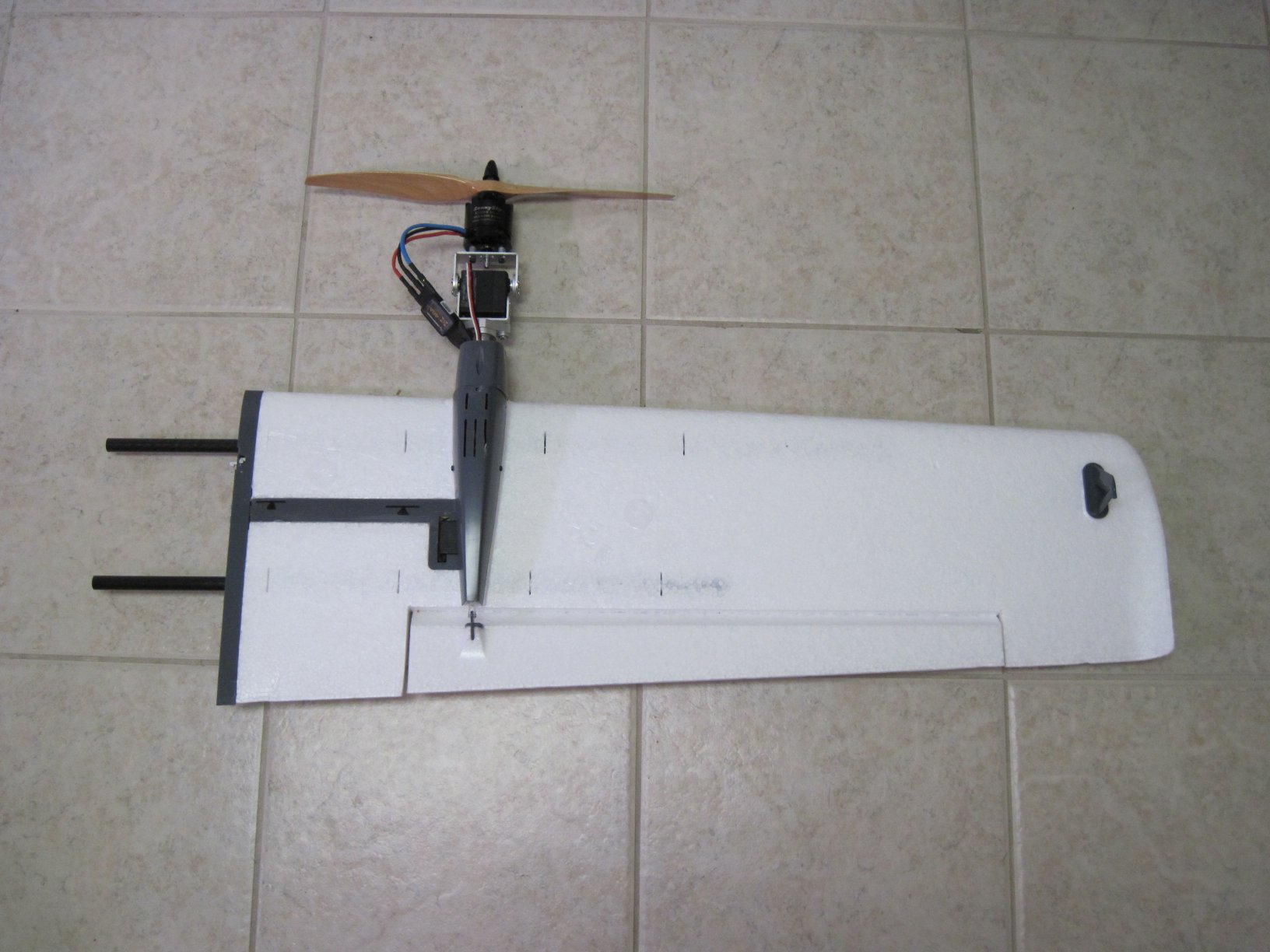
For my 6v BEC for the tilt rotor and aileron servo in the wing, I used the Turnigy 5v/6v 5A (8-26v) SBEC at Hobby King. By leaving the Hobbywing Xrotor 40A ESCs external, I could plug it directly into the motor without any extensions. The SBEC is also hidden in the plastic nacelle so no foam cutting or 3D printed parts were needed. The servo bracket simply unscrewed so it made for an easy VTOL modification. Both the ESC and SBEC get plenty of air flow.




Greg, what propellers have you used in that last test?
Hi Atico,
I am using these props that I bought from FoxTechFPV.
- Front propeller size - 1380 Wooden Propeller CW&CCW - These fit the 6mm shafts on the X3520 motors. Note the self-locking nut update.
- Rear propeller size - 1455 MKII Carbon Fiber Propeller CW&CCW - Only need the CW prop
P.S. Good looking BEC case.
Thanks Greg,
Do not you think that 1455 for the rear propeller will be something small?
I’m not sure yet. This was the original prop size used by FoxTechFPV V1 VTOL. They recently changed to a 1755 prop for V2 but I do not know the reason.
I am hoping to move my rear motor assembly aft so that I can add a video camera in the front nose area and keep the belly area for a mapping camera. Using a larger 1755 prop would make this more difficult.
I think Foxtech use one 1755 rear propeller because the rear motor has been changed by one X5008 KV330.
I have decided to use one 1655 rear propeller to 4112 400KV.
My idea is also to place one mapping camera behind the landing gear and one mini-camera in the nose.
Nice plane , i did now one , but the mission planner configuration it is very complicated,
you can send me the file with the configuration parameters. thank you.
Hi,
This is my latest .param file used in the hover video above.
GregsNimbusHover3.param (16.8 KB)
Cheers!
Our Nimbus hovering in Loiter, weight now 4.3kg with the following:
10800mAh 6S Titan LiIon pack - https://www.gettitanpower.com/products/titan-10-5ah-22-2v-360w
2200mAh 6S 45C LiPo - https://goblinhobbies.co.za/gens-ace-2200mah-22-2v-45c-6s1p-lipo-battery-pack-for-goblin-380.html
Foxtech PG20 - https://www.foxtechfpv.com/pg20-dual-battery-swapping-board.html
3 minutes hover on the 2200mAh 6S pack (40-50A!), forward flight as yet unknown on the 10500mAh but expecting at least 1hr 15mins.
No cameras yet, so am a little worried at how heavy this plane is getting. A RedEdge with single axis tilt is around 240gr plus still need to add a GoPro for RGB images and that means we’re getting close to 5kg which is a lot for a 1.8m span plane.
I’m also wondering if its getting close to any limits regards lifting power of the motor/prop combo’s?
V1 Motors:
1 x Sunnysky X4112S-11 400kv,
2 x Sunnysky X4112S-9 485kv.
Hi Graham,
Thanks for sharing your thoughts and numbers. It has been my experience that VTOLs capable of carrying a payload do get heavy. My FireFLY6 VTOL and quadplanes all generally seem heavy but can outperform their copter counterparts for range.
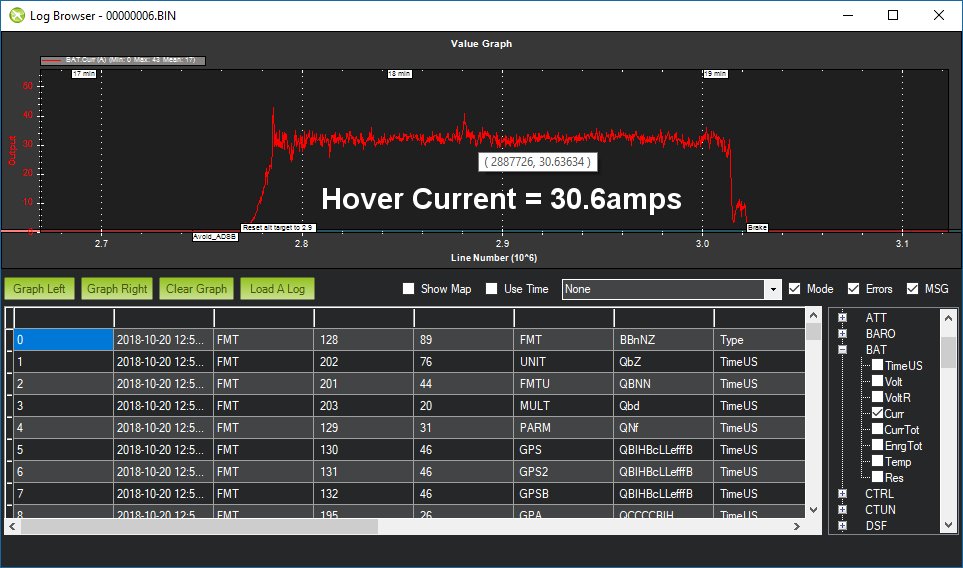
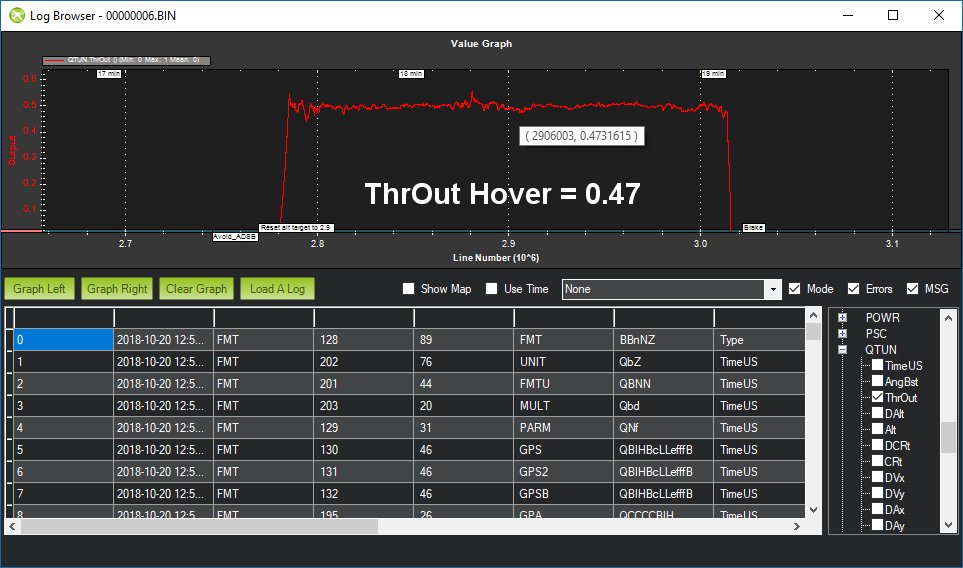
The graphs below are from my hover testing in the backyard. Without a payload, I am hovering at 30.6 amps and about half throttle so this is a good start. However, I have the larger Sunnysky X3520 520kv motors up front. So this is an option for you, if needed. I think FoxTechFPV has changed their Nimbus VTOL design three or more times as they experiment with various payload weights and flying in wind.
I have some concerns on the dual battery setup as it adds cost, complexity, and limits your hover duration in favor of a longer flight time. These concerns may be unfounded because I have no experience with dual battery swapping. If we look at your setup,
Total Weight = 908g (32oz) + 339g () = 1247g (44oz) not counting the swapping board
Compared to my Multistar 10AH 6s 12C Pack, this is a Weight Saving of 1320g – 1247g (not counting swapping board) = 73g (2.6oz)
Cost wise, you have $146.50 + $51 (not counting swapping board) = $197 per flight
Compared to my Multistar 10AH 6s 12C Pack at $119 per flight. Just some food for thought…
Greetings:
A friend of mine and myself have been working on getting a Nimbus 1800 VTOL ready for primetime. Today, we had a very good day, since the Nimbus hovered properly and then transitioned and flew as a fixed wing, flawlessly. The issue we had was on the landing. When switching back to multirotor mode, it did so, but oscillated heavily. It descended vertically, hard, oscillating the whole way and hit the ground with enough force to break the landing gear. No other damage was sustained. Needless to say, we are very happy with the progress, but puzzled with the issue. Do you have any idea what could have caused it?
Greg & Graham,
I imagine that for the front motors you are using 13x8 propellers.
What propeller are you using on Sunnysky 4112/400kv rear motor?
Hi Greg, all valid points. Our main problem is we want to map areas of 400-1000 hectares and are currently only able to do about 25Ha per battery with a multirotor. A 10Ah LiPo on the Nimbus only gives us 40mins flight which is about 52Ha whereas using the LiIon and LiPo combo will give us about 100Ha per flight. I would love the 2hrs+ that I achieved on a Super Skysurfer but it’s very hard for a VTOL.
3 mins hover on the 2200mAh is more than enough for a VTOL take-off and VTOL landing. Trying to do a VTOL landing with the LiIon pack after even 30 minutes flight is scary as it’s volt drop under load is dramatic towards the end of the flight. Also hovering draws over their rated max current.
Aticof, we’re using a 16x5.5 carbon prop. Fronts are 13x8 wooden props with nyloc nuts.
1 Like
Graham,
You do indeed have a very large area to map! I assume that you have considered using just an APM plane? Granted, these have their own set of problems like protecting the payload and requiring a landing area, but the efficiency and weight will be better without copter features. Since the area is so large, maybe a roadway exists for temporary landing strip. The FireFLY6 Pro can do up to 243 hectares per flight but it is more expensive. Anyway, I’m just spit-balling here and now understand your needs.
Atico,
I’ll graph my three motor outputs in hover mode and post it to see how much the rear motor is working. I suspect that it works less than the front motors as the triangle is not symmetrical. I’m currently using the 14x5.5 t-prop.
Rafael,
Welcome to our Nimbus VTOL group! My hope is that others like you join in to help form opinions on various issues and solutions. Sometimes this forum can be very quiet!
There are several reasons why your Nimbus oscillated upon return to hover mode. Initially, I would suspect a PID issue or not being pointed into the wind. Did you test the hover mode in various conditions? Do you have the weathervane feature enabled? Can you post your .BIN file from the flight where it oscillated?
Cheers!
Yes, we have a Arduplane (the Eve 2000) but launching and landing amongst hundreds of citrus or macadamia trees isn’t fun and most of these farms have few or very rough tracks and landing can be a real issue. Hence the Nimbus.
Graham,
It sounds like you need a Mugin. They range in size from 2930mm to 4700mm wingspan. The quadplane design would be more stable than the tricopter. The frame cost is beyond my hobby budget but it keeps me dreaming…

1 Like
Here is the graph of my three motor PWM settings in QLOITER mode. The two front motors (in red and green) are around 1577 and the rear motor (in blue) is a bit higher at 1670. My current setup is using the following components. It might be interesting for me to try a 15x5.5 or 16x5.5 prop in the rear to see how much the graph changes.
- Front motors - Sunnysky X Series X3520 520kv Brushless Motor
- Rear motor - SunnySky X4112S-11 KV400 Multicopter Brushless Motor
- ESC size - Hobbywing XRotor 40A ESC COB
- Front propeller size - 1380 Wooden Propeller CW&CCW - These fit the 6mm shafts on the X3520 motors. Note the self-locking nut update.
- Rear propeller size - 1455 MKII Carbon Fiber Propeller CW&CCW - Only need the CW prop
The FoxTech Nimbus VTOL V2 setup has changed several times but currently uses this setup:
- 2x Foxtech 3520 KV520
- 1x Foxtech X5008 KV330
- 1x Hobbywing XRotor 40A ESC(no BEC)
- 2x Hobbywing XRotor Pro 50A
- 1x Pair 1380 Wooden Propeller
- 1x 1755 MARKII Matte Propeller
