Greg, good contribution.
It would be interesting to compare if Graham post current with the 1655 .
I think one 1455rear propeller (4112 400kv) has less performance.
it can also help to slow down the rear engine
Maybe you might be better off converting a Skywalker X8 similar to what Vertical Technologies did. Although their underlying firmware is PX4 not ArduPlane. It’s “crude” but efficient with a single FW motor.
Good luck.
Atico,
I ordered a set of 16x5.5 carbon t-props today from GotHeliRC.com. It will make an interesting comparison. My setup will then match the original FoxTech V2 setup. They then changed their rear motor and prop again to X5008 KV330 with 1755.
I think original FoxTech V1 used the following combination which should match Graham’s setup.
- 2x Sunnysky 4112 KV485 (front)
- 1x Sunnysky 4112 KV400 (rear)
- 1x Pair 1380 Wooden Propeller
- 1x 1655 MARKII Matte Propeller(CW)
In my opinion this last alternative (x5208/340 & 1755) seems disproportionate to me, I think it is better option 4112/400 & 1655 but combined whit 3530/520 & 1380 front motor
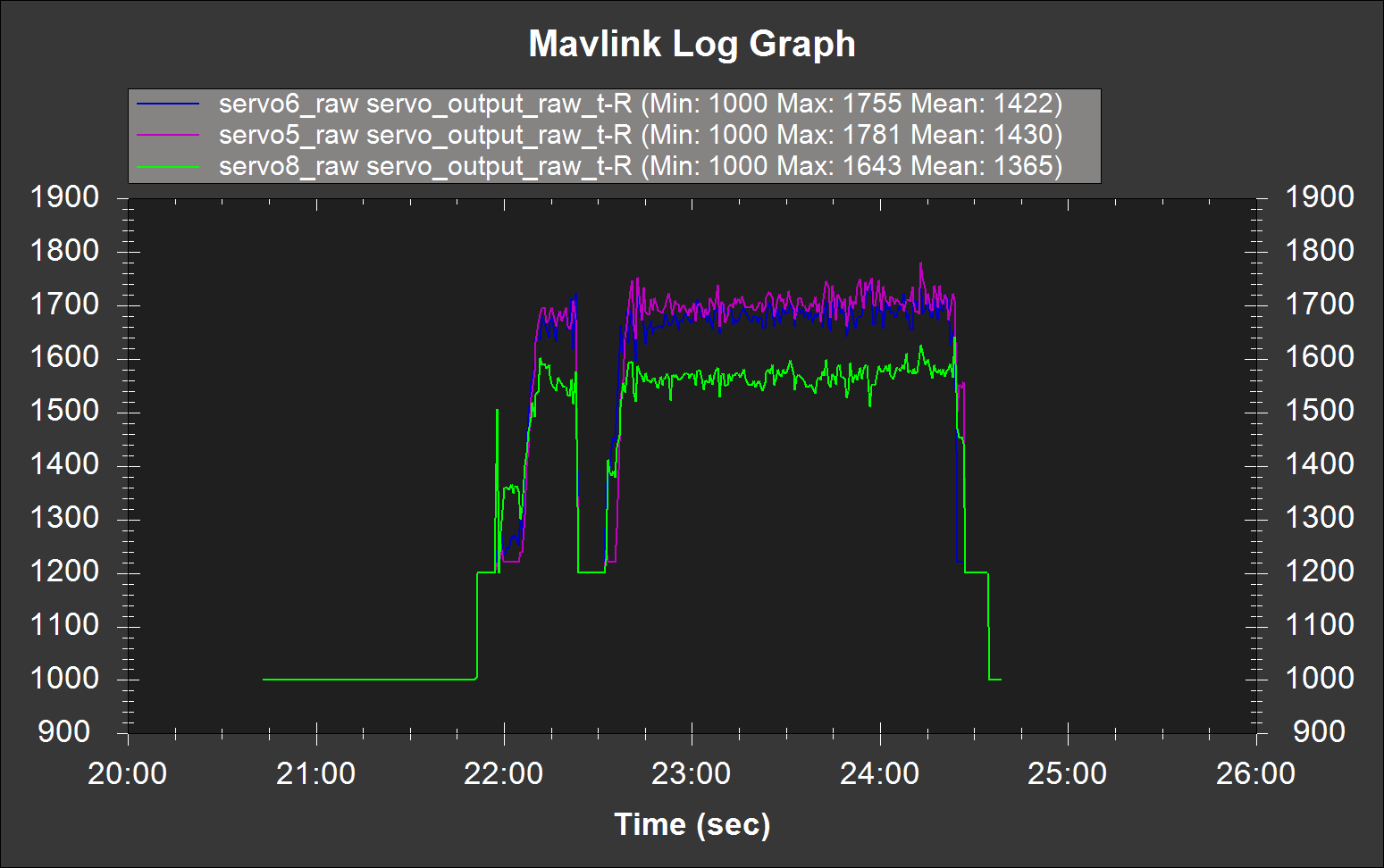
Greg, I did a hover test this morning. The two front motors mean are about 1425 and the rear 1365 so opposite to yours, rear doesn’t seem to be working that hard.
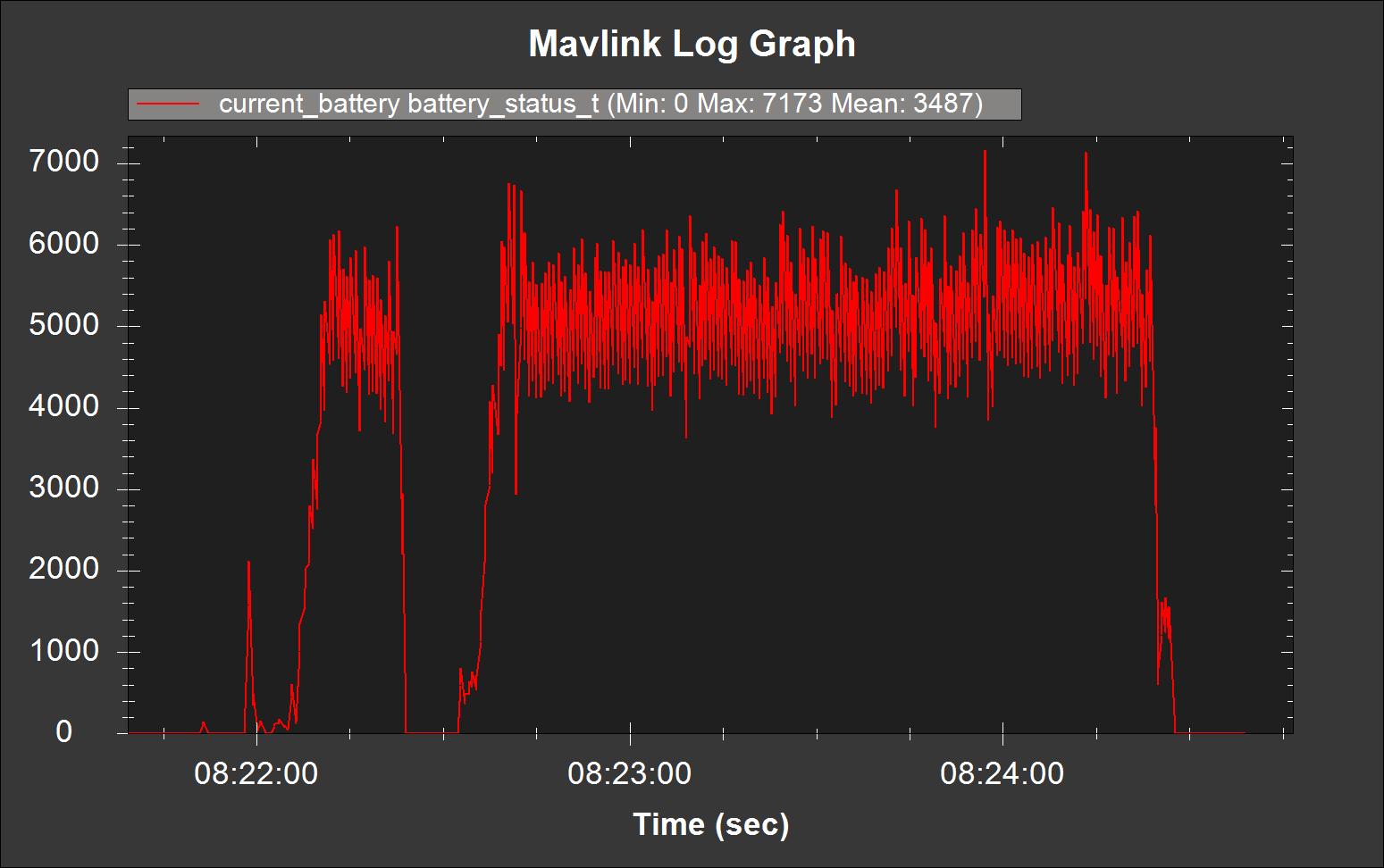
My hover current on the other hand seems quite high, average 58A during the hover period. This is with a new Tattu 6S 10Ah pack and AUW of 4.2kg (9.25lb).
What’s your weight?
My parameter file
NimbusVTOLafterREinstall.param (17.2 KB)
Hi Graham,
I can see the amount of work done by the rear motor is partially tied to the CG. If my memory is correct, you are using the Foxtech V1 VTOL so your front motors are lower Kv and different than mine and you are using a rear 16x5.5 prop. I am still waiting for my 16x5.5 prop to arrive.
I haven’t weighed my Nimbus VTOL yet so all I can say is that I have no payload and the CG is 100mm from the Leading Edge. I can weigh it this weekend.
The difference in our current measurements is odd. I am using a calibrated Mauch Power Module. What Power Module comes with the Foxtech V1 model? Perhaps the Power Module is not as accuate (like the 3DR version) or you have included your payload?
Cheers!
My 1655 prop arrived and my first reaction was, “Now that’s a prop!” 
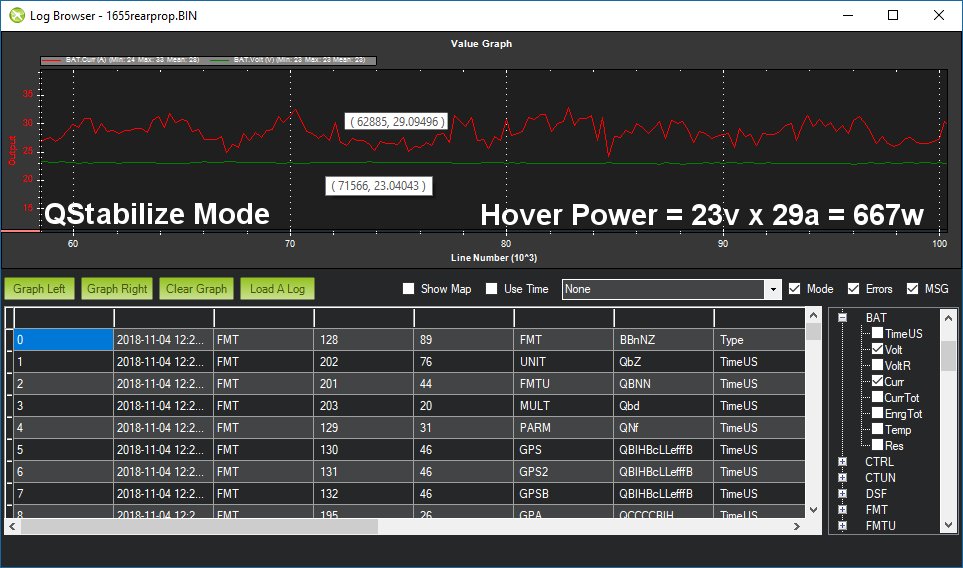
The weather was pretty nice today so I installed it and did a quick hover test in the backyard using QSTABILZE mode. The Nimbus hovered nicely with the new prop. I had a near full charge on my Multistar 6s 10AH Lipo pack which may account for the slightly lower C5 and C6 front motor numbers. This time they were 1524 compared to the last test at 1577. The rear motor C8 was indeed lower with the new prop at 1588 compared to 1670 on my previous hover test. This appears to be a good change.
The current graph goes up and down a bit as I feathered the throttle in QSTABILIZE mode. I took a near high reading of 29amps to multiple with the 6s voltage of 23v to get a hover power of 667w. This was close to my guess of around 700watts without a payload which is similar to the FireFLY6 wing.
This was also my first hover test after finishing the internal wing wiring with 6v BECs. It was nice to just press the wing halves in place without manually connecting wires!

good test, good comparation. >>> 1,6 A less
It would be nice to know the weight of your nimbus to compare it with the Graham test
Ahh, yes, I promised to weigh my Nimbus VTOL. So here it is:
- Multistar 6s 10AH Battery with Plywood Plate = 43.6oz (1236g)
- 1 VTOL wing = 26.5oz (751g)
- 1 VTOL wing = 26.5oz (751g)
- Both tails = 3.35oz (95g)
- Nose with AS Sensor = 3.45oz (98g)
- Body with Landing Legs = 44.8oz (1270g)
Total weight without payload = 148.2oz (9.26lb)(4201g)(4.2kg)
adding one minicamera with pan tilt in nose and a second camera = 4500-4600 gr
Now the question is what will be the performance of a Sunnysky X5208 KV330 or T-Motor MN5208…
anyway the flight Q should not be more than 10 seconds before the transition
I was going through some setup parameters and noticed that Graham had this:
AHRS_EKF_TYPE = 2
and I had this:
AHRS_EKF_TYPE = 3
This controls which NavEKF Kalman filter version is used for attitude and position estimation. Is there a difference?
I found this: https://github.com/ArduPilot/ardupilot/pull/5336 which explains a bit. I also compared your params to mine and there are quite a number of differences, some of which I presume, differ due to Foxtech’s testing and development phase.
Would love to know the reasons behind some of the changes.
Good link, thanks, Graham!
I have just compared the differences between our param files. Here are the critical ones below. Since you have flown yours, all the non-Q PIDs from yours should be used. I also need to enable the weathervane features, etc. I would still love to see a V2 .param file to see what the wind resistance changes were.
Differences from Graham’s PIDs
AHRS_EKF_TYPE,2
ARSPD_FBW_MAX,18
ARSPD_FBW_MIN,11
LAND_DISARMDELAY,10
LIM_PITCH_MAX,2000
LIM_PITCH_MIN,-1500
LIM_ROLL_CD,4500
MIXING_GAIN,0.5
MNT_RC_IN_TILT,0
PTCH2SRV_D,0.04
PTCH2SRV_FF,0.4
PTCH2SRV_I,0.15
PTCH2SRV_IMAX,3000
PTCH2SRV_P,0.7
PTCH2SRV_RLL,1.15
Q_ANGLE_MAX,3000
Q_ASSIST_ANGLE,30
Q_ASSIST_SPEED,0
Q_TILT_MAX,60
Q_TILT_RATE_DN,50
Q_TILT_RATE_UP,200
Q_TILT_TYPE,2
Q_TILT_YAW_ANGLE,13
Q_TRAN_PIT_MAX,10
Q_TRANS_DECEL,2
Q_TRANSITION_MS,3000
Q_VFWD_GAIN,0.05
Q_WP_RADIUS,500 (now 200, use 400?)
Q_WVANE_GAIN,0.2
Q_WVANE_MINROLL,2
RLL2SRV_D,0.1
RLL2SRV_FF,0.4
RLL2SRV_I,0.2
RLL2SRV_IMAX,3000
RLL2SRV_P,1
RLL2SRV_RMAX,0
WP_LOITER_RAD,80
WP_MAX_RADIUS,0
WP_RADIUS,10
YAW2SRV_DAMP,0.08
YAW2SRV_IMAX,3000
YAW2SRV_INT,0.3
YAW2SRV_RLL,0.8
YAW2SRV_SLIP,0
My changes in bold (corrections/suggestions welcome):
AHRS_EKF_TYPE,2
ARSPD_FBW_MAX,18 - (good max speed for this type/size of plane)
ARSPD_FBW_MIN,11 - (Just above the stall speed of 10m/s)
LIM_PITCH_MAX,2000 - (no need to pitch up more than 20°)
LIM_PITCH_MIN,-1500 - (no need to pitch down more than 15°)
LIM_ROLL_CD,4500 - (Limits bank angle for heavy plane)
MIXING_GAIN,0.5
MNT_RC_IN_TILT,0 - (for our camera gimbal)
PTCH2SRV_D,0.04 - (increased for tighter tune)
PTCH2SRV_FF,0.4
PTCH2SRV_I,0.15 - (increased for tighter tune)
PTCH2SRV_IMAX,3000
PTCH2SRV_P,0.7 - (increased for tighter tune)
PTCH2SRV_RLL,1.15 - (keeps nose more level in turns, less loss of height)
Q_ANGLE_MAX,3000
Q_ASSIST_ANGLE,30
Q_ASSIST_SPEED,0
Q_TILT_MAX,60
Q_TILT_RATE_DN,50
Q_TILT_RATE_UP,200
Q_TILT_TYPE,2
Q_TILT_YAW_ANGLE,13
Q_TRAN_PIT_MAX,10 - (default of 3 resulted in a worrying dip/loss of altitude during transition)
Q_TRANS_DECEL,2
Q_TRANSITION_MS,3000 - (changed from 5 secs, plane transitions quickly so 5 secs seemed too long)
Q_VFWD_GAIN,0.05 - (Wind resistance in hover)
Q_WP_RADIUS,500 - (looser waypoint radius)
Q_WVANE_GAIN,0.2 - (wind vane enable)
Q_WVANE_MINROLL,2 - (activate on 2 deg of roll)
RLL2SRV_D,0.1 - (increased for tighter tune)
RLL2SRV_FF,0.4
RLL2SRV_I,0.2 - (increased for tighter tune)
RLL2SRV_IMAX,3000
RLL2SRV_P,1 - (increased for tighter tune)
RLL2SRV_RMAX,0
WP_LOITER_RAD,80 - (good distance for QRTL transition, allows plane to slow down enough)
WP_MAX_RADIUS,0
WP_RADIUS,10 - (more accurate waypoints, especially with flying grids)
YAW2SRV_DAMP,0.08 - (tuning to stop tail wag)
YAW2SRV_IMAX,3000
YAW2SRV_INT,0.3 - (tuning to stop tail wag)
YAW2SRV_RLL,0.8 - (tuning to stop tail wag)
YAW2SRV_SLIP,0
2 Likes
Excellent, thanks, Graham!
I want FoxTech to sell their Nimbus foam packaging without having to buy the VTOL. It would be nice for storage or travel.

1 Like
Thanks for the details about your experience with the batteries. I also have the Foxtech Nimbus VTOL. (V2) It has the dual battery setup and works just as you described.
Please take a picture of your revised airspeed sensor location. Mine is stuck up on the inside bulkhead and interferes with the battery installation.
Just saw your post about V2 param files. I’ll try to post them as soon as possible.