Your tilt servos have much more strength than my RDS3115MG servos, so they will work fine. I have been using the weaker RDS3115MG robot servos with the X3520 520kv motors without issue. I believe others have been using this combination also.
The specs of the QA4220(3520) 580KV motor seem fine but I have never used them so I cannot attest to the quality. The 580kv versus the 520kv is minor. However, the 890w rating make make them run hotter and shorten longevity. For hobby use, they are probably fine.
Are you sure that your original VTOL motors and tilt servos were all destroyed in the crash? It seems unusually destructive since you were on the edge of a golf course with soft grass.
Afternoon Greg: After the Crash I sucked out the motor to clean out the dirt and sand then used my air compressor and blew it out hooked it up to a servo tester and tried it, the motor sparked and a puff of smoke along with the esc i thought it was just the esc so i put a new Hobby wing 40 amp and same thing happened so i assumed it was the motor so i disconnected the main batt and tried the tilt servo,it moved slightly so i disconnected and took the servo out and tear it apart and one of the gears had teeth missing and one gear had a crack,so i couldn’t find the same servo on any of the sites i have bought parts from so sent for another tilting system from foxtech,in the meantime i took the motor apart and found 2 of the magnets had pieces chipped off and now i’ve been looking for a pair of motors and i got these 2 from sunnysky and was surprised at how large they are compared to the ones that i had,the sunnysky 8oz and the nimbus was 4oz and worried that the servo might burn up so i’ll give BuddyRC another week and if they won’t answer or text me then i’ll cut the shaft off and try them while waiting for motors from aliexpress cause it takes 30-45 days to get items but Now i’m curious about i guess the 890w running hot. OH so since my crash of the Nimbus i’ve been flying my Drones while waiting on parts and stuff and i had a crash of my Tarot Ironman Quad in the same area that my nimbus crashed this would be Number 7 in the same area that i’ve crashed for no apparent reason while in RTL Mode i think i have a mini Bermuda Tri Angle here LOL Greg Thanks for the info and i’m always open for any and all suggestions and i also got the Mauch BEC and the HS-100-Lv in from C&T Thanks Greg.B.K
Hello Guys Happy New Year. Anything new? @GregCovey Ive seen you post regarding pixhawk resetting parameters. It happened to us with the Nimbus V2 and i dont know what causes it. We also have this happening with one of our DJI A3 and its kinda weird we cant track whats causing it. Anyone here experiencing this?
Happy New Year! Your thread is still alive and kicking in 2020. The parameter reset issue is nasty as people have been reporting it being very intermittent. Those are the toughest problems to fix. I thought that I read somewhere that the firmware loads defaults parameters when it can’t read them from flash memory. I didn’t look for the post again. So far, my Pixhawk 1 (v2.4.8) clones have been working fine, but, for my hobby use, I do not operate them in extreme temperature conditions.
Butch,
Since the motors are external on the Nimbus VTOL, it is easy to check their temperature after a flight or short hover. If they are warm or kind of hot to the touch then they are ok. It you can’t touch them without feeling like your fingers will get burned then they are too hot. Just remember that a VTOL application like the Nimbus typically has a short hover time and a long flight time.
Your “Bermuda Triangle” area sounds like you are getting magnetic interference. If you post a log from one of these crashes, we can take a look at what happened.
Good Morning Greg and fellow Nimbus Pilots: I went all the way back to #18 to find your build and you have V1 tilting system and i saw you used a spacer on the motor so i tried up to 5/8 and the shaft was still hitting so wth this morning i cut off the shafts put the motors on the V2 tilting system everything looks and works good on the bench,however i’m worried about how stiff the motor wires are so i’m going cut the wires off and put 14 ga silicone wires that will offer free 'er movement without binding? I see your getting that artic freeze Sorry it’s going up to 80 here but taking a nose dive Mon into Tues we may not get out of the 50’s , I will try to post my last Drone crash and when you have some free time take a look maybe you can detect something that went wrong,when that happened i was in RTL mode it looked like it turned upside down and started falling it caught itself went back up to RTL height started coming back then did it again and that time it didn’t recover, the day before it flew fine and this has happened to 5 different other drones in the same area ! and all were in RTL mode all had a Pix 2.4.8 and when i repair them i put a new compass/gps and the old standby APM no more crashes (Fingers crossed) so far. Thanks Greg for all You Do for all of US.B.K
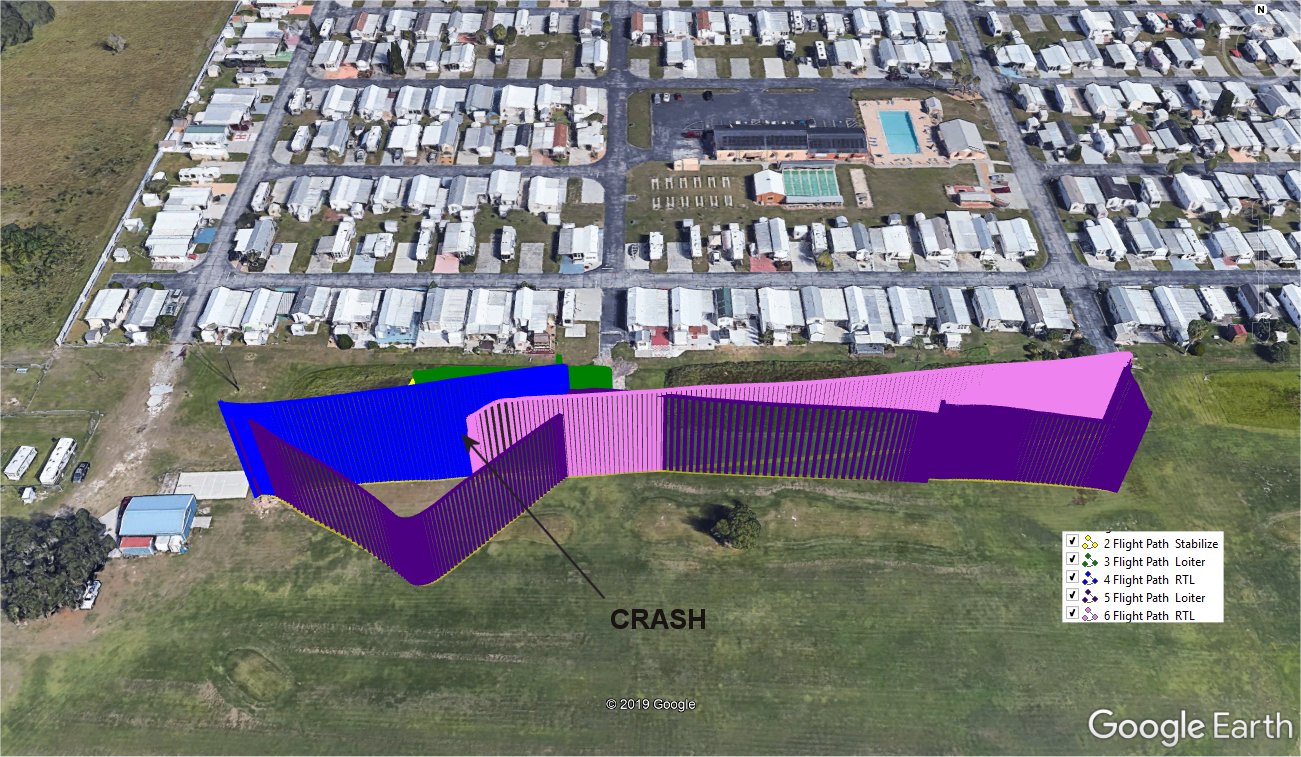
The log file was good. Although it looks like you were terrorizing the golf course again, I see no evidence of a crash. Both the log and the kmz image below show a good RTL (in blue).
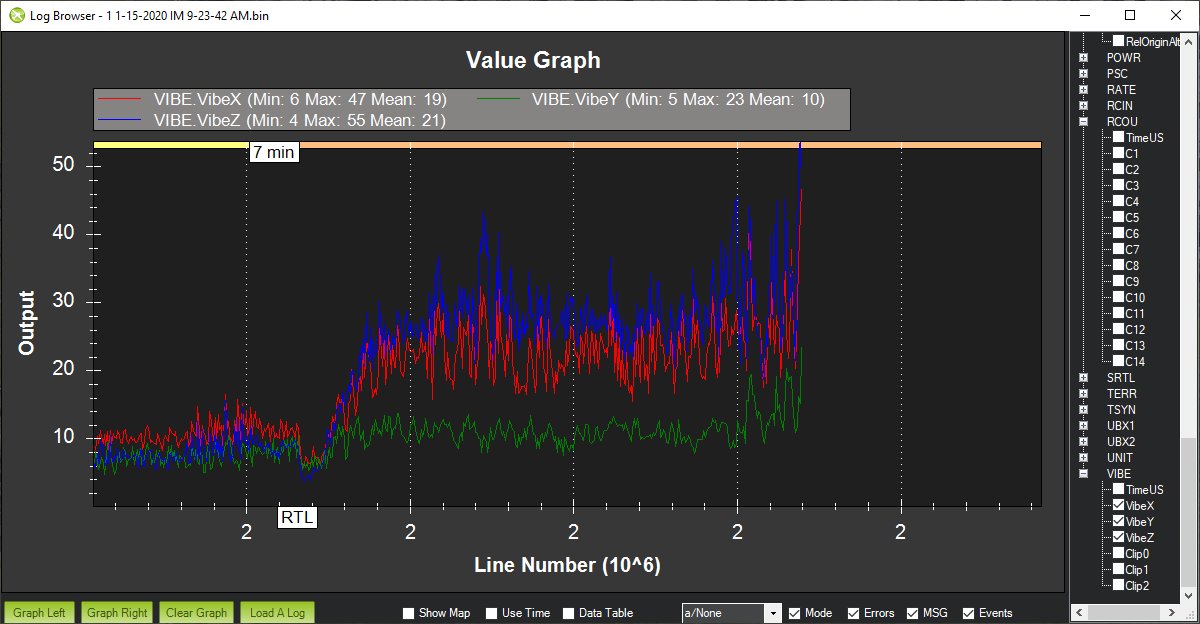
Ok, this one looks like a crash at the end of the second RTL (in pink). It looks like you started the flight in STABILIZE mode, then Loitered out (in green) and did an initial successful RTL (in blue), then Loitered out again (in purple), and the second RTL back (in pink) just stopped. The only thing I found abnormal was an increase in vibrations during the return. This also happened several times during the flight but not as severe as in the final RTL. What is your Pixhawk sitting on?
Hi Greg: The Pix sits on 1/4 in double sided foam pads=4, i also have 3/4 in pads or them things they send you with the Apm’s that has 4 little blue rubber dampening balls if you thing that will help, at the present i have 580kv pancake style motor’s using 15.5 folding props, so i guess i’ll change the pix mounting fly it then if Vib’s are still bad i’ll go to CF props,i got 11,12,13,14. in. Normally after i fly i check out the on board Video and if theirs alot of jello i change props to see if that helps. Thanks Greg for the info when the wind dies down i’ll give it a test.B.K
Good Morning Greg: these are the ones i was referring too I put this on this morning and re-calibrated everything just waiting for the wind to subside looks as though i’ll take 3-4 days and it’s cold 50 deg but not in the teens like you Burr! Stay Warm and thanks B.k
Hello everbody,
I am very impressed by the extensive source of information and support on this forum, and I am taking the chance of asking the experienced crowd for their advice?
We are currently starting a research project which partly involves UAVs for collection of remote sensing data. As we will work on the development of an adapted airframe in later stages of the project, we are currently looking for a “sensor testbed” for the initial tests. We will work on different cameras, put them into 2 axis gimbals and therefore need a VTOL “workhorse” that can carry a 0.5-0.7kg payload at speeds of up to 25m/s for 30-45 minutes.
The Nimbus seems to us as an interesting base (though others work on X8-based frames), but we are unsure about the different VTOL versions available. So far, we could identify FoxTech, UnmannedRC, UAVS and MyFlyDream as potential products beside several DIY versions.
As we are primarily looking for a timely ready “running system”, RTF version obviously would seem preferable, although shipping time (4-8 weeks, and costs of -400 USD) to Europe might delay project progress. We also recognize that certain design flaws exist in the various versions.
So, my question is, what approach would you take if you started from scratch? One of the ARF, RTF versions (and if yes, which of them) despite the long shipping time, partly DIY by using pre-assembled components (e.g. tilt mechanisms, brackets, wings) or completely DIY following any particular guideline?
Please keep in mind, that I am quite experienced in UAV assembly, electronics, software, RC flying, etc., but as we are talking about a new project, we would need to buy everything new (including RC controller, etc.).
Hi Pascal,
Sounds like you have both time and cost constraints, I would personally recommend UnmannedRC. Those guys are super friendly, and their pricing is competitive too. Perhaps, you could speak to Kris and arrange a faster delivery. Do you endeavour to deliver any non-commercial benefits to the society from this project? If yes, what are they? I’m only asking these questions to see if I should personally try to hook you up.
Regards.
Hi GregCovey,
thank you for your prompt reply. I do appreciate your inputs despite the fact that you’re not into commercial application and do this just “out of interest”. Your experience is very valuable to the community and thank you for your suggestions.
I definitely think that the UAV of Alex (ARACE) have a high level of performance and are definitely on a professional level, however we are currently just seeking for a robust but simple (not yet long endurance/range). As such, the UAVs of Arace are somehow a bit above the performance/cost we are looking currently.
As mentioned above, we are running a research project of primarily scientific purpose, and aren’t interested in any commercializing ideas.
Dear Wasim,
thank you for your reply and I appreciate your suggestions and your personal interest. I do understand that Ardupilot is commercially applied, however our project has purely non-commercial interest.
We think, that UAVs have an barely used potential of providing data for efficient and effective management of protected areas and wildlife. As such, we are aiming at exploring the potential of UAS technology for supporting management of the huge (and often partly inaccessible) conservation areas in developing countries (current focus on eastern and southern Africa). We want to develop a technological solution that is affordable for those communities and can be (partly) maintained/manufactured locally to ensure a sustainable/long-term application of the technology and increase local capacity in drone technology and remote sensing by involving/training/etc. engineering students, conservationists and local NGOs. We think that only in such a way, new technologies will be in reach of less-developed communities.
Please have a look at our last publication about our opinion on the challenges and development needs of UAV technology for nature conservation: Development perspectives for the application of autonomous, unmanned aerial systems (UASs) in wildlife conservation
As you realized, time and costs play crucial roles at the current stage. We see that the prices for VTOL Nimbus versions range between 900 USD (MyFlyDream RTF) up to 9000 USD. Since we will use the frame just for a limited period/number of flights to test sensors, we’d like to keep expenses within limits. The proposed version of UnmannedRC is above our budget for this activity (4700 USD for a simple RTF version), because we don’t see the justification of their price of this product as compared to other versions (MyFlyDream 900USD, UAVS ~1300USD, FoxTech 2300 USD). But maybe you can provide any insights into the differences of the versions which would explain the price range.
We could furthermore identify significant differences in the components, e.g. in terms of the tilt servos included, as their torque ranges between 13kg (MyFlyDream RTF) and 33kg (UAVS).
Hi Pascal,
I am an Academic myself, and the abstract of your publication certainly sounds interesting. I may be able to help - I will message you directly.
hi all, it has been a long time not check this chat… i’m currently working on a nimbus vtol project again but this time i try to use PH4 mini for it… the problem is PH4 mini is only have 8 PWM output without AUX output, instead it have 4 PWM input/capture… and i’m run out of PWM output right now… is there anyway to change the PWM Capture/Input become PWM output on PH4mini