
Yes, it’s set up in ArduPilot to allow that.
It’s best to use the ArduPilot guides when using ArduPilot.
yes, i use ardupilot firmware on it and i think i found the setting… it says, In order to use outputs 9, 10 and 11 you need to change BRD_PWM_COUNT to 11. thank you @james_pattison
Great. My comment about using the ArduPilot guides is because the image you posted is from the px4 guide.
There’s significant differences in the capabilities and setup between the two projects, so you need to follow the right set of instructions :).
Hi Rollys,
thanks for your suggestions.
Vertical Technologies seems to have a quite elaborated RTF product with a decent flight performance, though prices of the Deltaquads start around 10k€, a bit more than what is currently asked for Nimbus-based VTOLs.
VTOLs of Sparkle Tech look very professional and robust, but are huge and heavy, starting at MTOW of more than 10kg. To obtain flight permissions for UAVs above 5kg can be quite a challenge here in Germany. As such, we think that for the planned payload of 0.5-0.7kg we might find a solution within the 5kg limits.
Anyway, I’ll keep you updated…
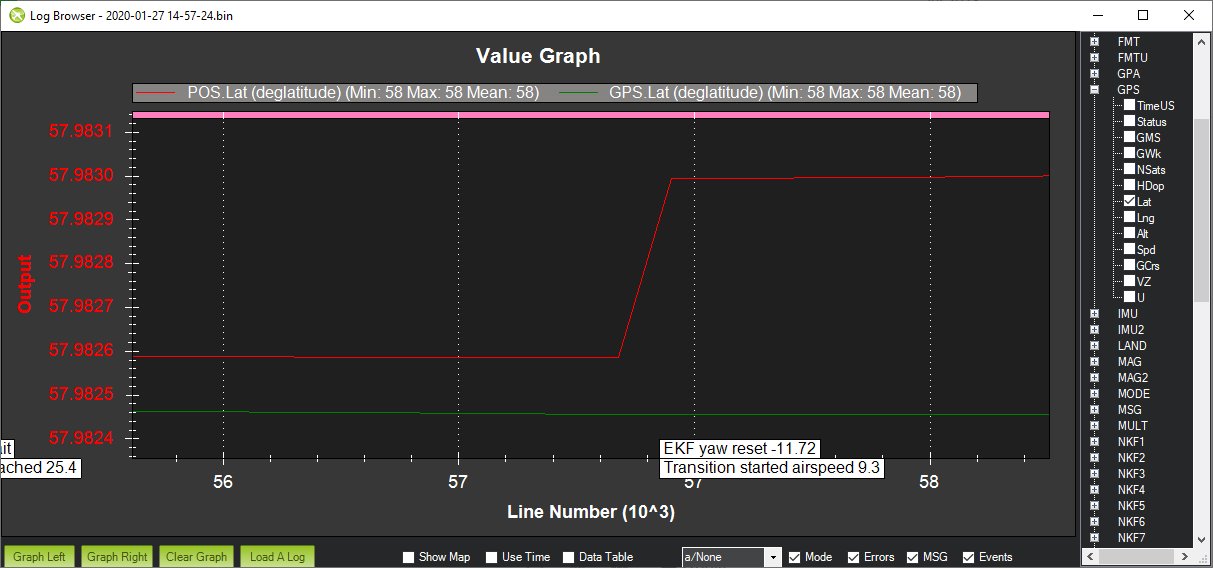
Hello dear. Today I wanted to send my nimbus along the route and almost crashed. I do not understand why the different readings of GPS and POS. Can someone help me figure it out?
Thanks

The most interesting thing is that two hours earlier the plane flew along the route, including auto take-off and landing, and this time gaining altitude with the left roll went down and I barely managed to take controlhttps://drive.google.com/open?id=1wJ8b0hEkzqa0FFoA_U335p8OAzCSw4J8
Here is my log file, look, please, if not difficult
Thanks.
Hi Aleksandr,
The POS is the EKF’s final estimate (or POSition). It looks like you had an EKF yaw reset. This was caused by a momentary switch (about 1 second) on receiver channel 5 from AUTO to QLOITER to CRUISE back to QLOITER mode.



Thanks to Greg for the quick reply. I switched mode Almost before the fall. The plane did not behave adequately right away when it switched to AUTO mode with a left roll and a drop. Could there be another reason for this behavior?
Greg, what could have affected the course change during takeoff and loss of altitude at the same time? Was the plane supposed to climb with the right roll according to the route?

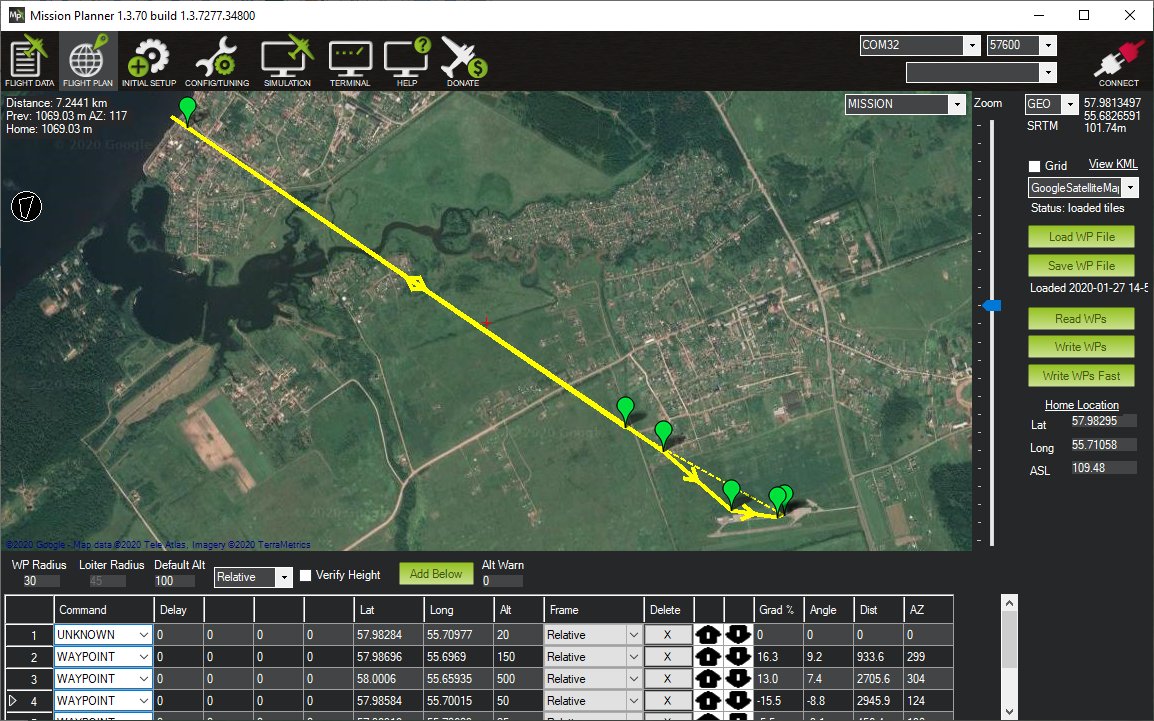
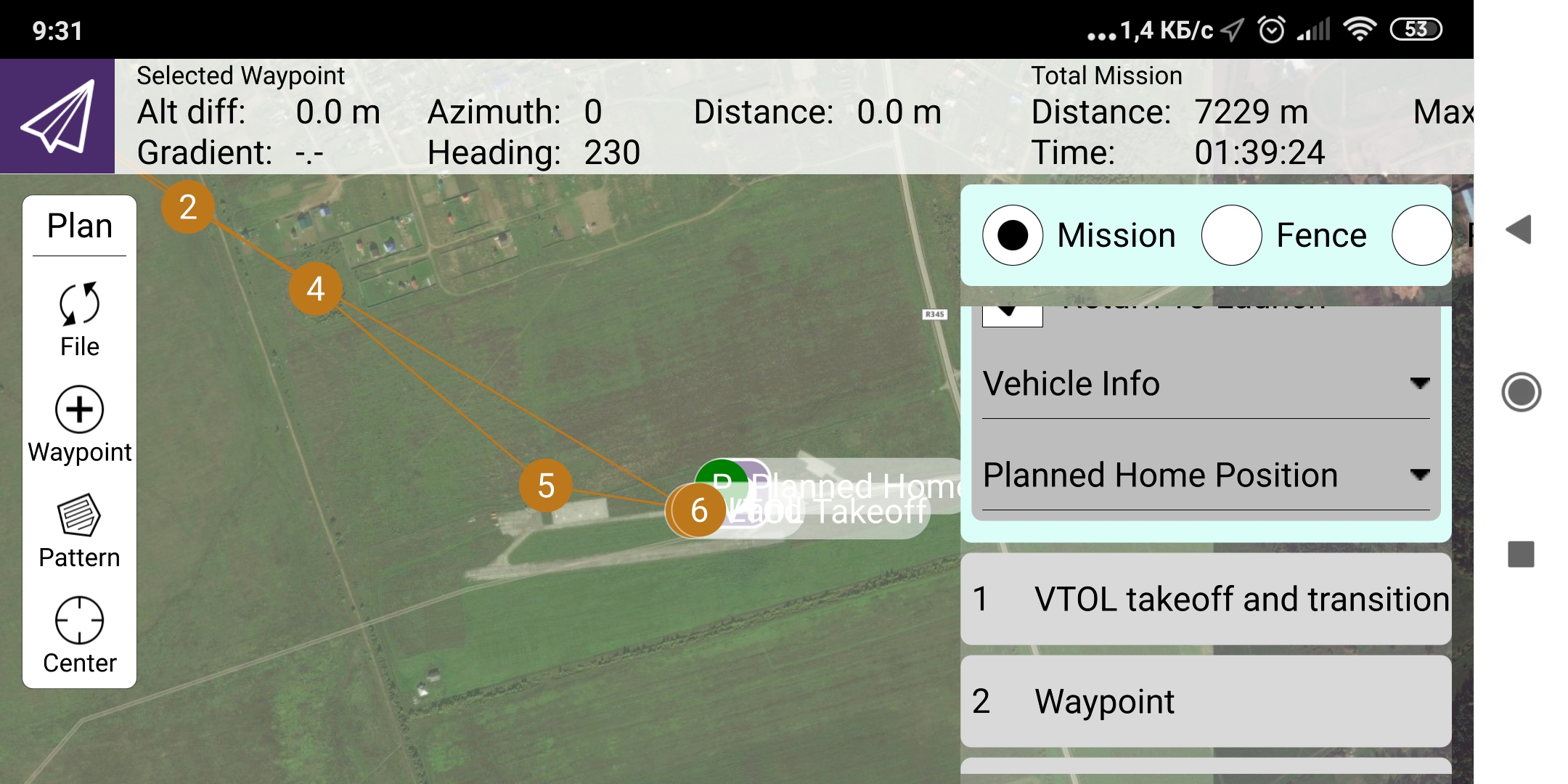
Ok, I see now, Aleksandr. There are two missions in the log. See the images below. Perhaps your Nimbus lost its mission. Did you do a read back “Read WPs” of the mission from the vehicle to the GCS before flying?
Also, on my Mission Planner v1.3.70, the first command reads, “UNKNOWN”.

Hi Greg. I am grateful for your promptness. To create missions, I use QgroundControl on a mobile device. There may have been a failure. I switched the power to the nimbus several times, the airspeed sensor gave erroneous data. I reloaded the route and maybe an error crept in.
Thanks!
Hi Greg: I think changing the FC mount and new props may have corrected the T-Quad drone problems,i flew it around 3 different days here’s the log for last nights flight https://drive.google.com/open?id=1USzj_ArjDT0SZuGpAEAIhV9tL3v0RMIV maybe you in your spare time could look at it, I’m also working on my 2nd Nimbus VTOL i purchased a Pix Cube and a mini Carrier Board and trying to use this PDB that came with the MFD VTOL Plane since it’s wired different than the other plane i crashed,I get everything to work except the rear motor so i’m going over your complete Param list again maybe i missed something,Oh MFD sent me the nimbus motors that was missing in the box the site you gave me worked and they said that was the first time they heard about my missing items and last friday at 20:30 DHL Del the package and to my surprise it was the Motors but i’m still going to use the sunnysky motors since i already cut the shafts off and have they on the wings.Thanks You keep warm and dry,B.K
Butch,
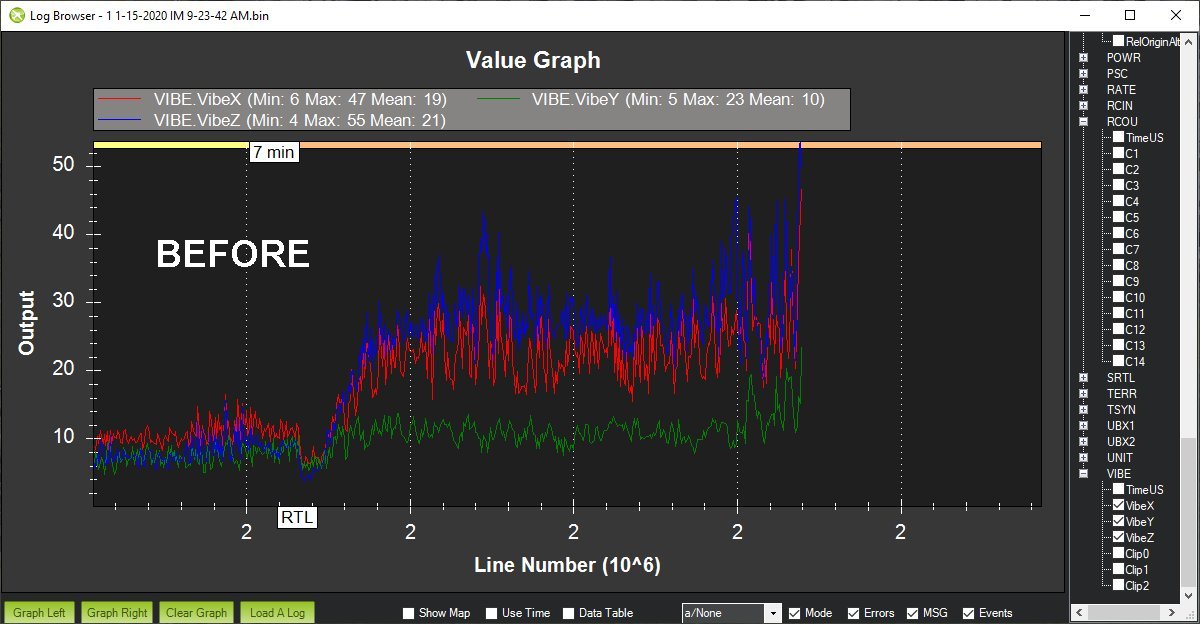
The vibrations have been greatly reduced to normal now. Before, the levels were hitting 30 and now they are mostly below 8. The fixes have worked well!

Hi Greg: I am Puzzled on the Nim VTOL Now,when the nimbus is armed,motors not running, the Ail and the V-tail surfaces work the way their supposed for example lean plane left left ail goes down the right goes up when i lean plane right the right ail goes down the left goes up,when i pick up the tail nose down the V-tail surfaces go up and when i pick up the front the V-tail surfaces go down, now when i start the motors nothing moves except the tilt motors when using the left Rud Stick the left tilt moves toward the rear the right t-motor moves forward and the opposite occurs when i move rudder stick to the right and when using the Ail stick the tilt motors move slightly and the speed of the motors change and once again the Ail or the V-tail surfaces does not move when the motors are running so am i missing something ? the Foxtech manual states their supposed to any suggestion would be alot of help and appreciated Thank B.K
Hi Butch,
Your run-on sentences can be difficult to follow. ![]() I suspect that you are using a cell phone.
I suspect that you are using a cell phone.
Testing the control surfaces should be done while disarmed so what you posted looks fine.
I have not seen the FoxTech manual so I can’t follow its interpretation.
It sounds like you’re making good progress so good luck on your initial hover testing! Don’t skip the basic testing before attempting a transition.
Cheers!
Hi Greg: Sorry about my bunching all this stuff together that don’t make sense i try harder Thanks B.K
Hi Greg: Maybe this will help me describe my confusion on how to explain why doesn’t the Aileron’s or V-Tail surfaces move while armed and motors running ?https://drive.google.com/drive/folders/1kDEElXDZdXlApLQsfHrOd9U72Sa399ZX?usp=sharing. Thanks B.K
Butch,
My guess is that you are not using the FoxTech firmware or parameters for which the manual was written for. It may also be a feature that is disabled on your setup like Weathervaning and Wind Hold.
Hi Greg:You are Right i Bought the Nimbus Plane from MFD and am making it into a Vtol using your Params.So since foxtech would not sell me or give me a SD card with their Params and FrSky X9D settings i guess i’m thinking i should try to mimic their setup by following their online Manual. SOOO if anyone that follows this thread That actually bought a Foxtech Nimbus VTOL ARF that uses a Taranis and it came with this SD card for the Taranis settings and their Params for the Pixhawk to be used on Mission Planner would you Please post a copy of the original SD Card that came with Your Nimbus VTOL.Thanks.
Greg i think my nimbus setup is like the first one and i’m ready once again to try the Q-Stab mode and the Q-Hover mode and practice and fine tune it prior to trying the FBWA Mode and i thank you again.B.K
Butch,
I would recommend simply testing your hover capability first. Before transitioning to forward flight using FBWA mode, you need to test the control surfaces for proper transmitter stick movement and movement when tilting forward, backward, left, and right. This is done while disarmed. While the rudder will move both v-tail surfaces using the left tx. stick, you will not see any movement if you turn the plane clockwise or counter-clockwise.
Good luck!