Sorry to hear that you crashed after all your effort and testing. If you want to post the .bin log file I will take a look but my suspicion is that you somehow lost the main battery power. This suspicion is based upon your comment below and the fact that the video camera stopped while the plane was still quite high.
“everything quit no control and it went straight nose down”
Good morning Greg: i think i got the log in hopeful it works if not i got it on facebook in a group of Apm 2.& Pixhawk all versions, i haven’t accessed the complete damage yet due to depression lol,so to get my mind off my sorrow i charged up a Batt for my Tarot Ironman quadcopter that i haven’t tried since we got to Fla in Sept and i been working on the nimbus and my 2 X8 octo’s and my Hex,so this morning i took it over to my flying area and about the same place that the nimbus lost it my quad died and dropped about 5 feet then recovered i continued to fly it around in hover/loiter mode and every once in awhile it would do the same thing i tried RTL everythings fine until it stopped over head and then it did it again lucky it was up high enough and had room/time to recover after about 12 min my volt per cell 3.7 IDK puzzled ? OH my wife asked if i was going to order parts but fox tech don’t sell just the body they have the wings and the nose weather but now i’m debating if i should get another kit and start over? thanks for your time sorry to be a Pain.B.K
Rolf :Hi sorry i guess i don’t know how to get my Logs uploded on this site i tried several times and it would say file to large and quit when i tried it again and it took it i assumed it worked.Thanks B.K
Hi Kevin: yes sir i did but i have other drones that i have flown and nothing affected them here is a video of the Quad’s flight where it happened 4 times, i’m just a old retired guy and don’t know how to read logs and it seems i don’t know how to post them either to maybe get some help,after i download the data flash logs i try to do a auto analysis but it keeps telling me Not available when used as a windows store app?,IDK except to Fly,Crash,Repair Re-pete or just don’t fly this drone any thoughts or suggestions is appreciated heck i’ll try anything Thanks B.K https://youtu.be/ym5SivUNxJ0
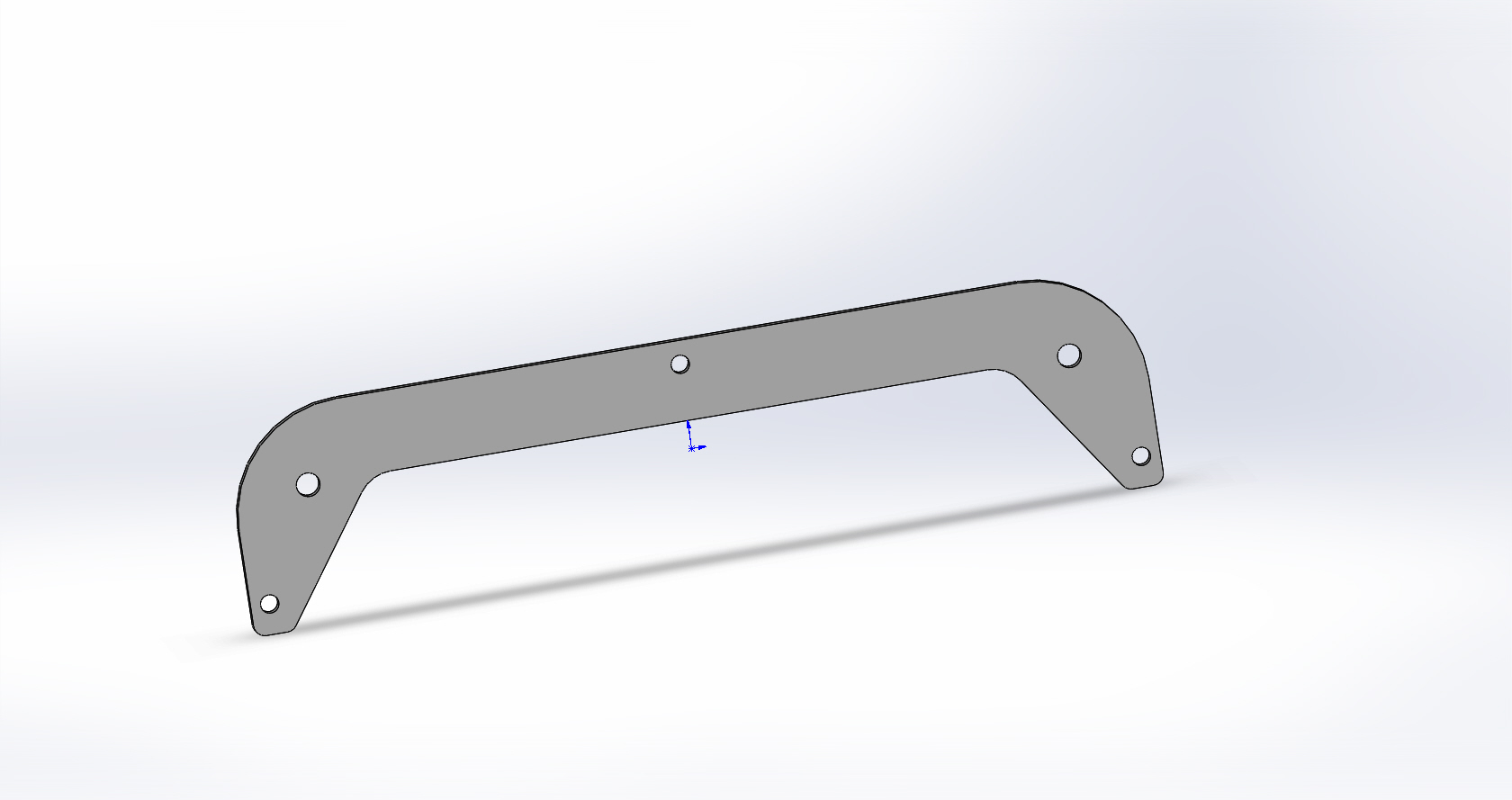
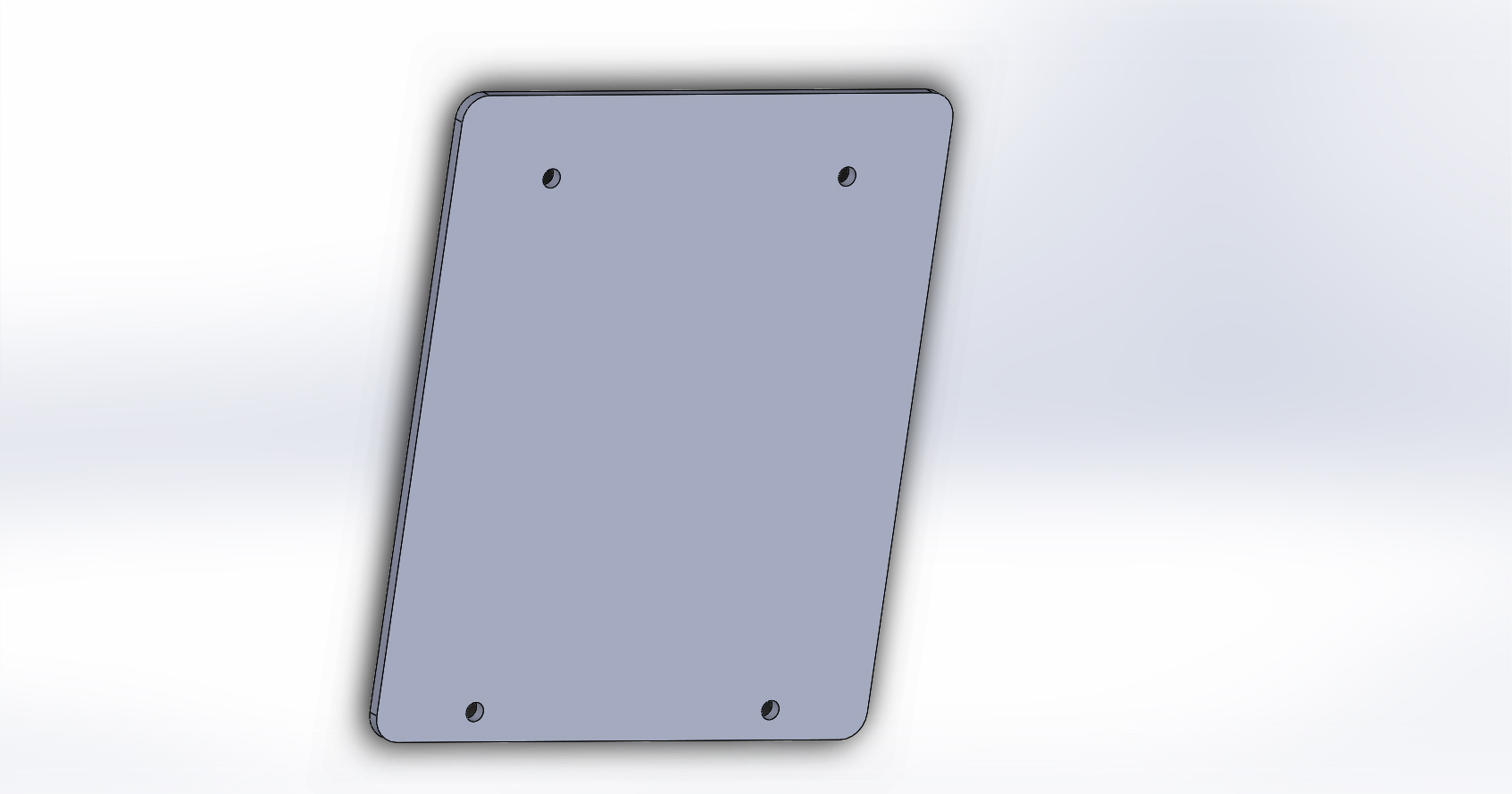
Reduced Nose Plate to allow larger batteries. Uses the original hardware but may require reaming of the holes to fit perfectly due to differences of manufacturing. Recommend the use of Carbon fiber of any weave, not to exceed 2mm in thickness (preferable 1.5mm, same as original):
This piece should be epoxied to the wood surface of the payload/landing gear area that is underneath the belly of the fuselage. The landing gear that comes with the Nimbus kit from Foxtech should be match drilled to this plate BEFORE you glue it on.
The hole pattern on this plate are matched to mount the Foxtech Map-02 Camera. You can use those four 2.5mm screw holes to mount the landing gear instead or the Map-02 camera or not cut them out at all and do your own thing. Recommend 2mm carbon fiber of any weave. Be generous with the epoxy.
Hi Greg
I installed now a digital airspeed sensor on my nimbus on the IC2 port with the compass With I2C Splitter Expand Module. But when i connect the compass the airspeed can’t work.You know how to go connected (compass and digital airspeed sensor) at same time?
How do you have your sensor connected?
thank you.
Since there is only one I2C port on the Pixhawk, you are correct to connect an I2C Splitter Module to create more ports. The compass and the AS sensor should be on different I2C addresses so they do not interfere with each other. In other words, you simply plug them in and activate them in Mission Planner.
However, there are versions of both the compass and AS sensor that have the same I2C address. What are the versions of these components you are using?
There are multiple variables here that may be confusing. I would first try to get them to work one at a time. In other words, make sure that the AS sensor is unplugged and get the compass to work. Next, unplug the compass and get the AS sensor to work. This will also determine if you have a 3v or 5v compatibility issue. What are the manufacturer names of the components? Do you have any links?
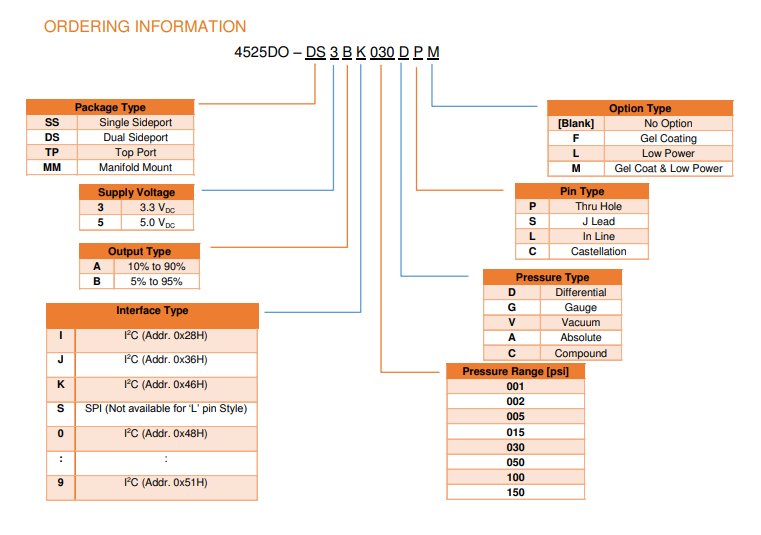
Now try to get both compass and AS sensor working together. The I2C address is often configured by the manufacturer of the component. Sometimes you can change a small trace on the board or jumper to a different I2C address. The diagram below shows that the 4525DO can be ordered with different I2C addresses.
Thanks, Butch! It was nice indeed, and snow free! I hope that you had a nice Thanksgiving too. The snow, however, has returned overnight so we are back to all white again. Since I rarely fly in the winter months, I am rearranging my overloaded hobby spaces.
I’ve been reading your posts, and those of many others, in this forum for a few weeks now. Being new to participating in any forums, is this a good place to ask questions about my Nimbus failures, share my successes, and generally be part of the team? Or, should I start a whole new thread somewhere else? Please forgive my ignorance, and I look forward to exchanging ideas with you guys.
Thank you, sir! My first subject will be about unreliable Vtail servos.
I got my Nimbus VTOL V2 from Foxtech 3 or 4 months ago. It’s the T12 version, because I liked the compactness of the Skydroid T12 radio that comes with it. After two successful flights, and while preparing for a third, I noticed a Vtail servo twitching like crazy. I sent a video of this to Foxtech, and they sent me an entire Vtail assembly, with servos installed. It came with no instructions, so I installed it, made sure the tail surfaces moved in the proper directions, and launched.
This resulted in a crash wherein the Nimbus just tracked straight toward the ground, without any response to my inputs. Foxtech analyzed my logs, and told me that the servos were not properly calibrated. I’m new to airplanes, so I was unaware they needed that. Anyway, one vtail surface moving up too far created a tail stall, and the plane went nose down.
For those of you who haven’t experienced this, be prepared for Foxtech’s cheapo servos to fail. And when you replace them (hopefully with better ones), be sure to adjust them in the Parameters settings (Servo Min, Max, and Trim). Foxtech says they put theirs at 30 degrees up and 30 degrees down. And, if you’re concerned about your CoG being too far forward, and can’t get it to move back, add 3 to 5 degrees up to the trim, so the tail will be pushed down in forward flight.
I imagine that me teaching any of you guys about how a Nimbus works is like teaching water how to flow downhill, but perhaps someone will find this information useful.
I hope you guys are doing well. Sorry for the long post; I’ll try to make them shorter in the future.
More posts on an issue is better than no posts as it creates a consensus. If you search for “EMAX” in this thread, you’ll find several complaints about the tail servos quitting. In Post #434, I show my replacement of the EMAX ES3054 servo in the tail…which has worked fine since.
MyFlyDream designed the v-tail structure around the EMAX ES3054 servo so it was difficult to substitute a higher quality servo. I tried to fit several different servos but the sizes were always just off a bit so I found an exact replacement (and testing) to be easier.
As you have found out, the new servo needs the max, min, and trim recalibrated after installation.
To Foxtech’s credit, they shared the responsibility for the crash and have sent me some replacement parts for 50% off. Meanwhile, while growing impatient with the abnormally long shipping times, I repaired my Nimbus by making a new nose cone from EPP foam that came out of a car bumper. I also used EPP to replace crushed portions of the fuselage. New servos and props, and I was able to launch it again last week.
It crashed again. At 30 meters altitude, I switched to FBWA, it got unstable, and headed straight for the ground. Remarkably, my EPP nose cone was totally undamaged, but the EPO fuselage is a mess.
I’m not very good at interpreting logs, but I suspect an in-flight reboot due to excessive power draw. When I downloaded the Flash logs, two KMZ files appeared: One in Qhover as it climbed, and one in FBWA as it descended. Could this be that the Pixhawk Cube re-booted in flight?
Anyway, I really appreciate your inputs about the tail servos, and I hope my contributions are helpful.