@GregCovey i have adjust trim and endpoints setting in the servos tab on mandatory config. We had issue with tail servos centering. Awaiting our savox to arrive. Havent flown the system again. Ive advise foxtech about there servos burning even laid down on the table. They supplied us with analog emax.
We have intergrated the airspeed sensor wiring with the pdb on the nose.
@GregCovey I have the Nimbus V1 from Foxtech. Their KFF_RDDRMIX is 0.5. The plane seems to fly fine with that and it does not seem to slip in turns, but there is no rudder enabled, ie the V-tail doesn’t move when one applies rudder stick, yet it does move with that rudder mix.
I tried using 6S 10.6Ah Titan LiIon batts (18650GA cells) which weigh 920g rather than the 1400g of a 6S 10Ah LiPo but the Titans couldn’t handle the current, getting very hot in the process and even melting the heatshrink over one of the tabs. Hence the reason for the dual battery board, to use a high C, low capacity pack (eg 6S, 75C 2200Mah) for hover and the low C LiIon’s for forward flight, increasing endurance.
Our airspeed sensor was DOA when we got the plane so replaced it but of course if one boots Arduplane without it attached then you can’t connect it later without rebooting, so I just made the silicon tubes longer, removed the 2 PCB’s and mounted the sensor under the battery. Thus the nose can be detached while loading a battery (and booting with the sensor attached) then the nose (with pitot tube) reattached.
The other change made to the params was changing Q_TRAN_PIT_MAX to 10 deg, this stops the aircraft from losing too much height during the transition, ie keeps it’s nose up better.
I did see the KFF_RDDRMIX of 0.5 on a V1 log so I changed my setting to match it. I wasn’t used to using a tail mix with ailerons on my other v-tails but you are the second person now to recommend it so I will give it a try.
So far, my AS sensor setup is working nicely…it just requires a re-boot from Mission Planner once the nose is installed. I’ll change my Q_TRAN_PIT_MAX to 10 deg as you suggest.
We’re still waiting on someone posting a V2 param file so we can see the changes for improved wind resistance.
I received my Foxtech Nimbus VTOL V2-Tilting System and was happy with the quality of the parts. I’ll probably still wait for my replacement RDS3115MG servos to arrive since it requires less assembly and changeover.
I noticed that the FoxTech servos in the kit have only a 90 degree swing and the RDS3115MG servos have a 180 degree swing. They even have RDS3115MG servos with a 270 degree swing. Can any of these servos be used just by changing the max/min settings for the tilt?
Yes, it is nominally 90 degrees and maybe 100-110 degrees with maximum 1000-2000msec swing. The servo used is AGF-RC B53CHL Digital servo.
They changed their rear motor to a X5008 330Kv motor so the 17x5.5 t-style prop is probably fine. I am using the SunnySky X4112S-11 KV400 motor with a 14x5.5 MKII carbon prop.
It looks like they added lifting power to the V2 design once payloads were being used.
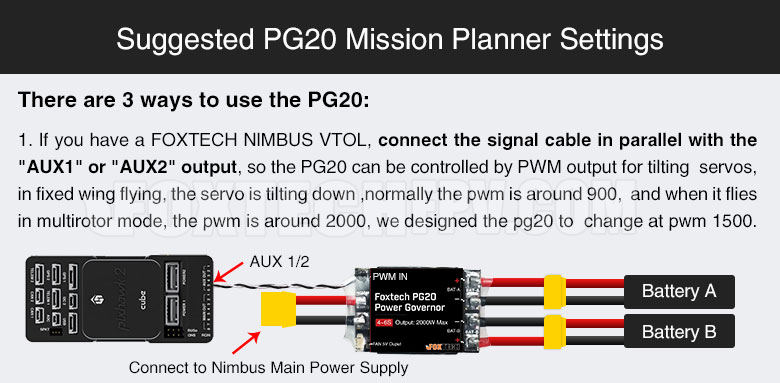
Our PG20 dual battery switch arrived today. Has anyone used one of these?
It is switched by varying PWM values, so does one just switch it with the Tx or setup the FC to switch it according to mode (I’m thinking the latter is the better option)?
As for prop size, 14" to 16", it all depends on your usage and payload. I would think that different prop sizes would work fine as long as the servo output pwm control is not near a limit. PIDs are adjusted to compliment the setup. The changes in the FoxTechFPV motors and props are likely due to gaining experience with heavier payloads and wind resistance.
In other words, a mapping VTOL will be set up differently than an FPV VTOL or an aerobatic LOS VTOL.
I noticed on my FoxTech V2 Tilting System that they use 7" carbon tubes. On my initial setup, I use 6" aluminum tubes like the original conversion by Kris. It seems that the longer the motor mount tube becomes, the more change in CG you have between VTOL and FF mode, but, there is less prop over the wing. Any comments on this from anyone?
Correct. It doesn’t mean that you can’t use a 16" prop. Sometimes the easiest way to change your system dynamics is to simply change the prop size. Remember that in most VTOL applications, the idea is to use minimal hover time because forward flight is much more efficient.
I measured approximately 220mm between the CG and tilt servo shaft. Add another 35mm to reach the motor base.
Graham,
I am a bit leary about the PG20 as it adds complexity and does not have a track record. What duration do you hope to obtain that cannot be done by simply using two main batteries for two flights? Perhaps I am thinking more of mapping and your goal is longer FPV flight?
All,
I received my new RDS3115MG servos from Amazon and was happy to discover that they are really the same 180 degree servos like I had before and not 270 degree like the site promotes. For $16 each with free 2-day shipping, they beat my order from Banggood which is still in transit.
I installed the servos and powered up my Nimbus and aligned the motors for QSTABILIZE and FBWA flight modes. The servos seem to work quite well and the Sunnysky X3520 520Kv motors really spin nicely!
My currently issue is that the front motors only spin when armed in FBWA mode. In QSTABILIZE mode, only the rear motor spins. The robot servos do properly point the front motors up. I will check my servo connections today as I ran out of time last night.