We managed to get out and do a little more testing. In particular I wanted to test the operation of the PG20 dual battery board. Everything went well, the batteries installed were a Gens Ace 2200mAh 6S 45C pack and a Titan Power 10500mAh 6S 3C Li-Ion pack. The 2200 gives a hover time of 3 minutes max at ~40A.
The plane took off on the 2200mAh LiPo pack with a voltage during the take off of around 21.5V (lower than expected but then current was about 40A) then changed to the 10500mAh LiIo pack with the voltage around 23V.
The area flown was 27Ha (66 acre) with 3954mAh used from the 10500mAh pack so about 44% of the usable capacity. A full pack should thus be able to do 60Ha (~150 acre), not as much as hoped. Time in air was 21m36s with around 50mins expected on the full pack. Again not as much as I was hoping but we’ll test again to see how much we can actually get. Terrain following was activated for this flight, with an elevation variance of about 50m so the plane climbed 40-50m on each leg and descended again. Current usage will be lower of course if it maintained a steady altitude.
Transition back to VTOL was ok and the plane landed fine. Distance covered was 20.3km (~12mi).
I managed to get some air-to-air video from my Mavic of one of the take-off and landing tests earlier. There is a weird wing wobble/rock present just after transition to forward flight, the cause of which I’m unsure, but it was present each time.
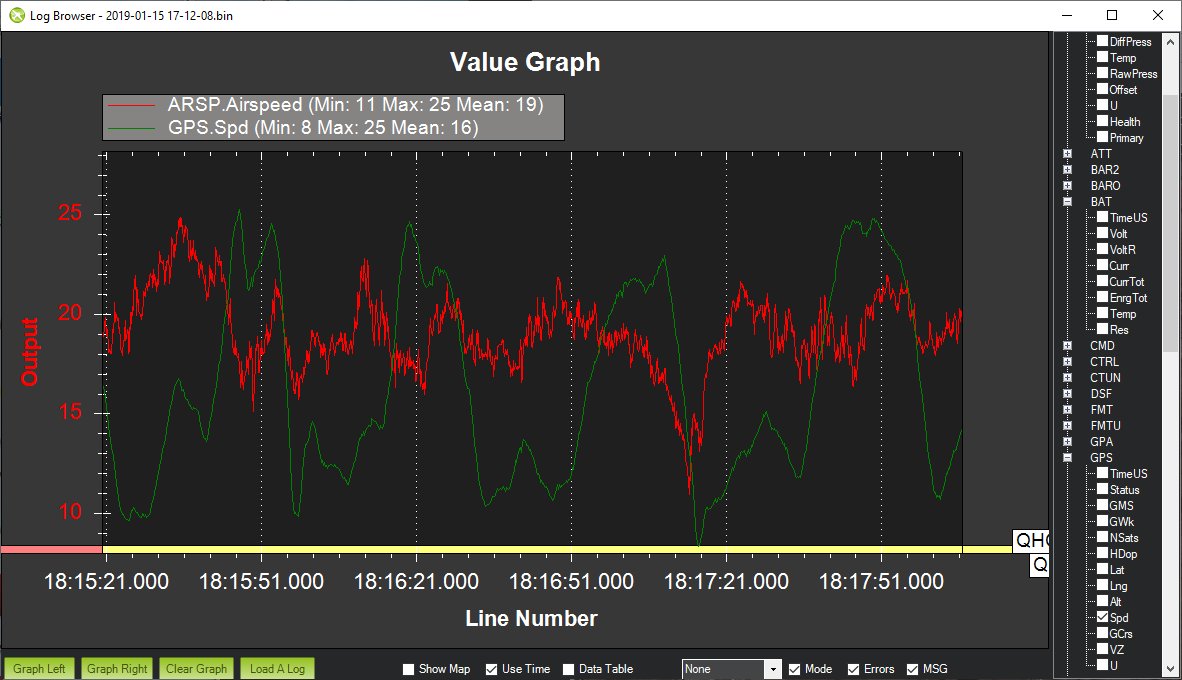
I have seen that wobble before on my FireFLY6. Try reducing the Q_ASSIST_SPEED setting by 1 or 2. The original FireFLY6 firmware never had the wobble because it just brute-forced the transition. It looked much smoother. The APM firmware uses air speed to more intelligently determine when it should complete the transition. I believe that the wobble is during this final period when the plane isn’t going fast enough to trigger the full transition. If you are using an Air Speed sensor, graph the AS sensor speed vs. GPS speed and see what the difference is.
I would love to see your mission plan if you want to post it! Also, what camera are you using and software to crunch 60Ha worth of data?
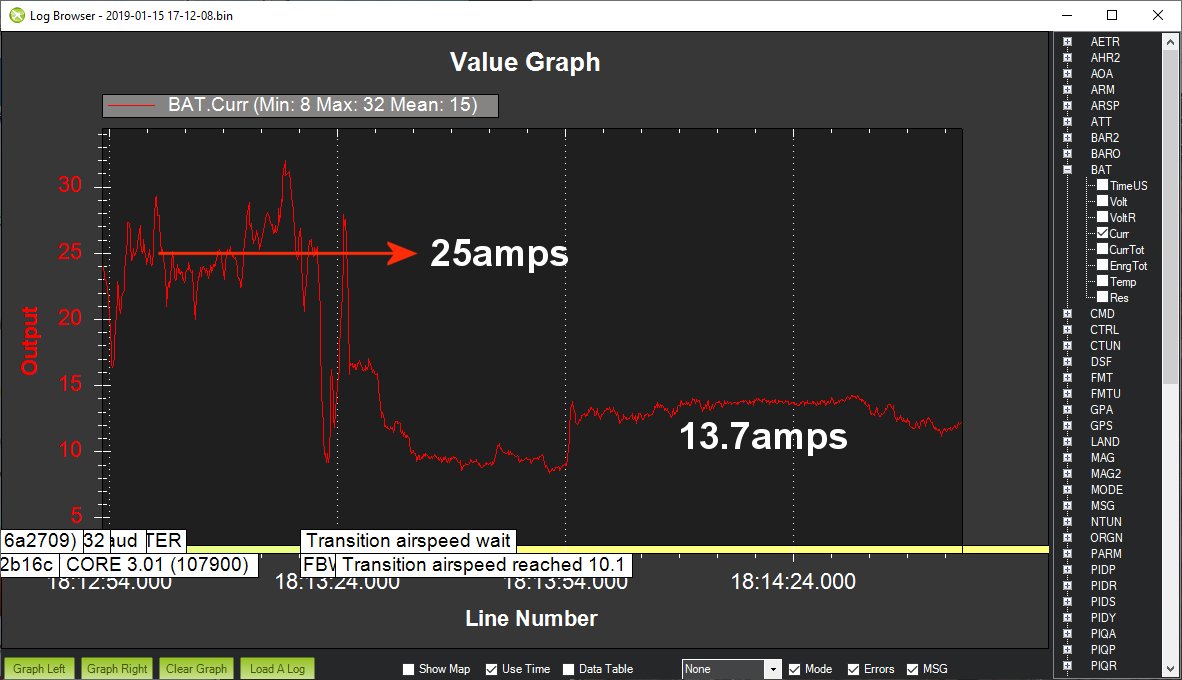
Here are some graphs from Bobby Mosher’s flight. The hover current is around 25amps and the forward flight current about 14amps. I am not sure what Power Module he is using. I believe his power system is the XUAV conversion kit.
HI Greg,
Do you remember the weight of the carbon fiber landing gear?
Hobbyking says 41 gr but it may not be real.
I have one (h=125 mm) and it weighs 20 gr
Greg, but you have not testedn it as a plane. It would be good if other friends who have already tested it as plane would comment about this incidence.
My friend Rortega has it with zero incidence, for this reason I’m worried
Zero incidence relative to the horizontal stab is not good, it can cause tuck-under (nose-down with increasing speed) which is quite undesirable in planes. Mine has the same incidence as Greg’s.
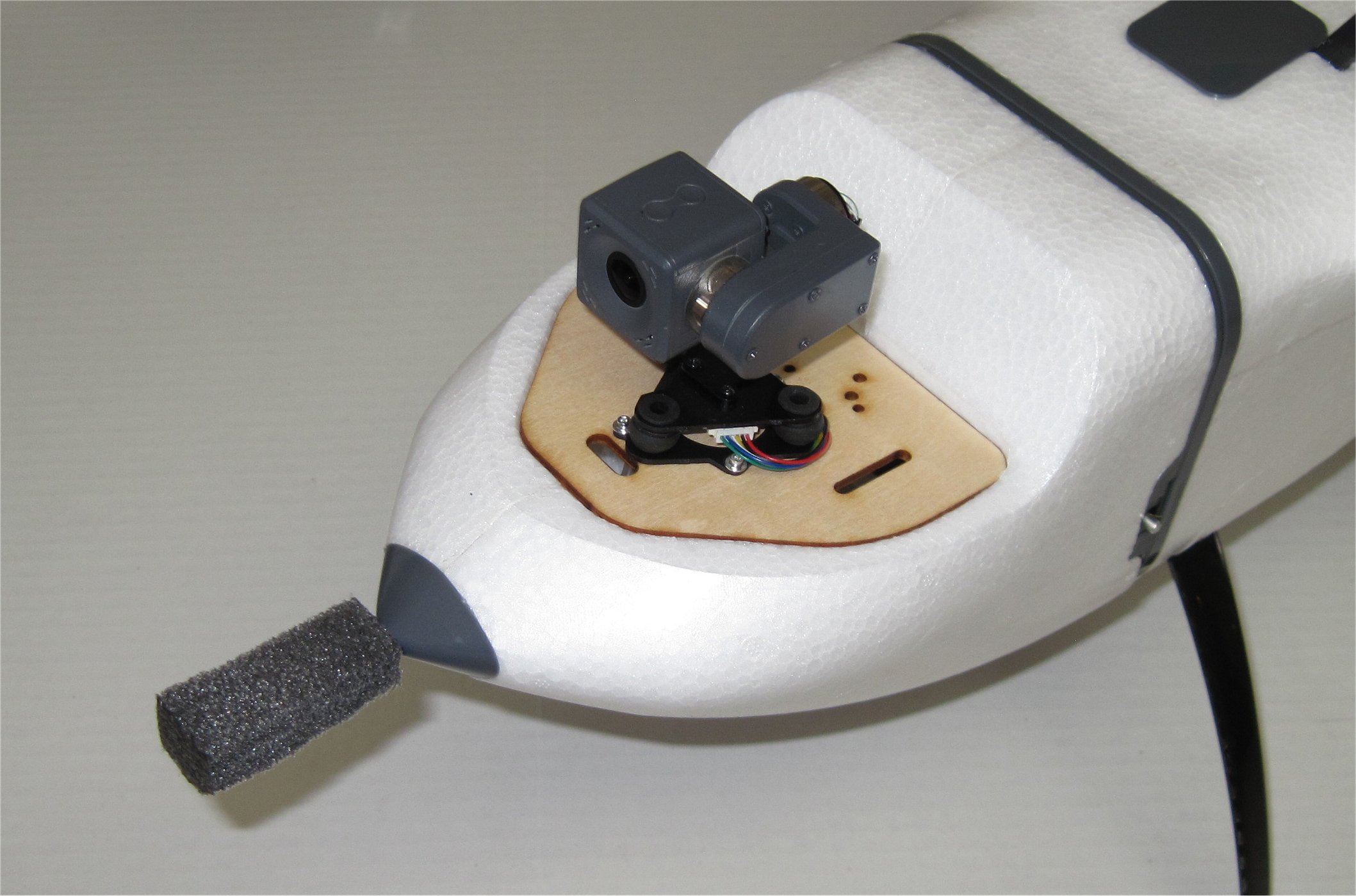
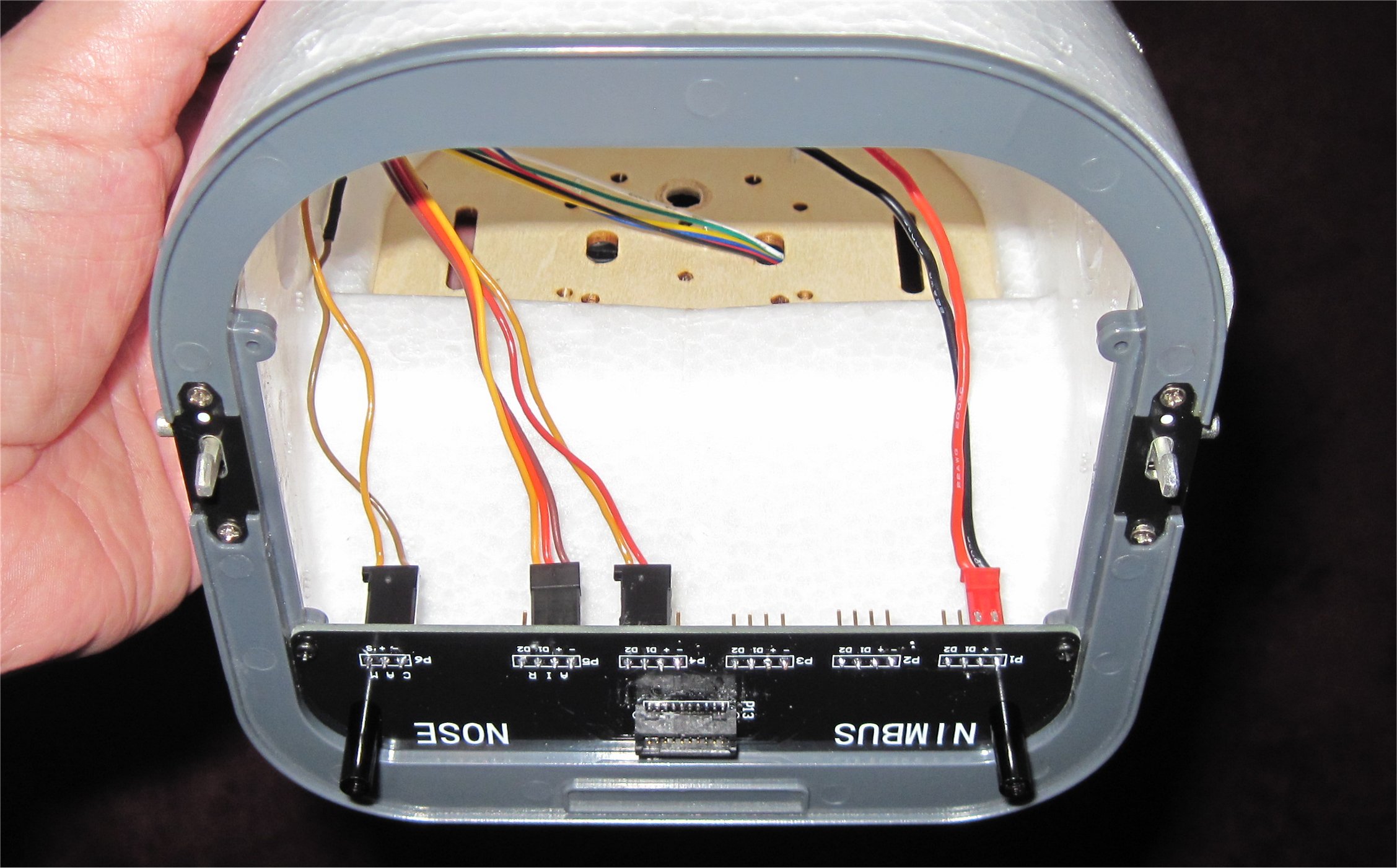
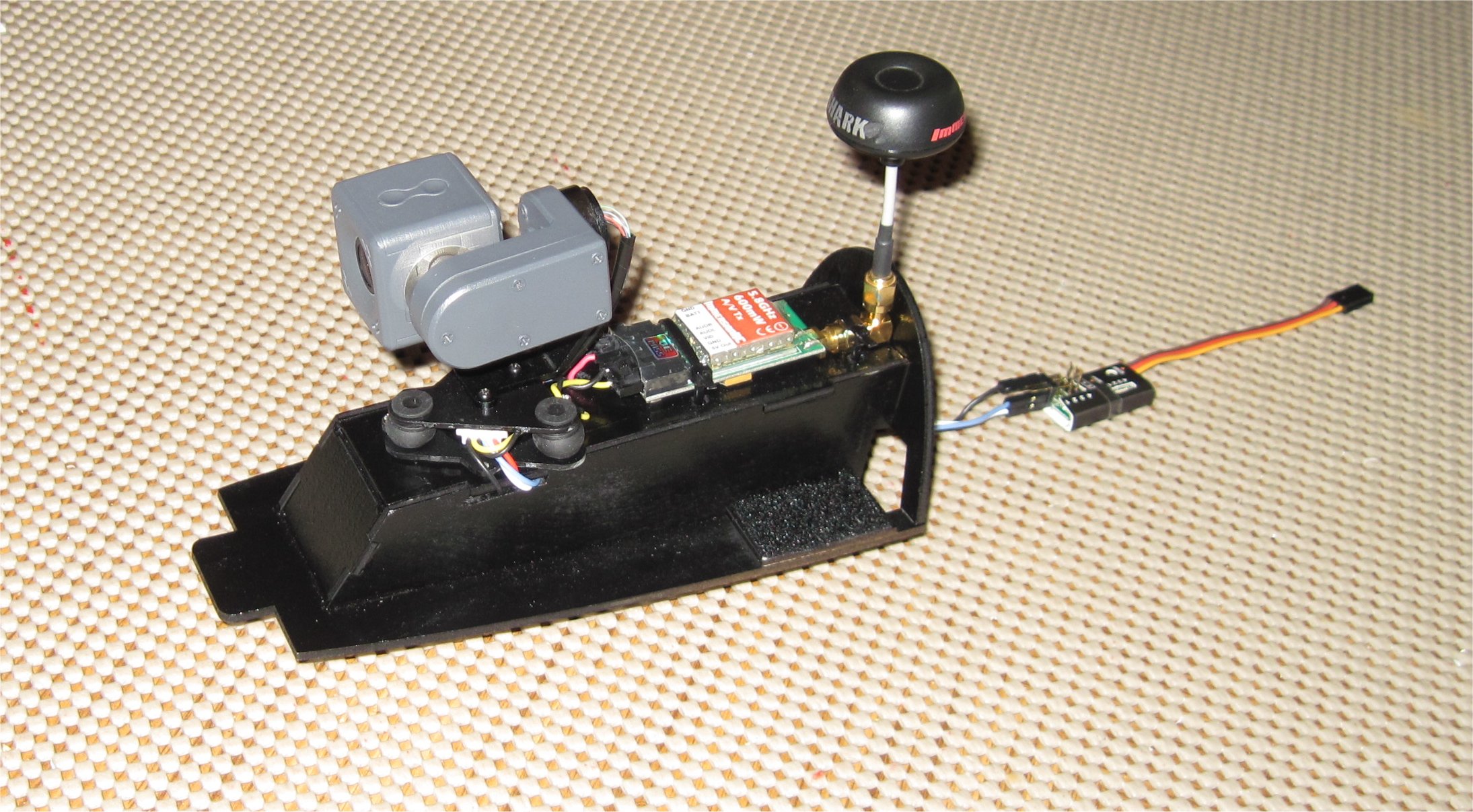
I mounted my second camera on the nose plywood. The Arkbird Mini Gimbal Camera is designed for small fixed-wing FPV planes so it doesn’t offset the balance by much. The 2K camera and gimbal weigh only 80g (2.8oz). I can swap it from plane to plane easily as it uses a common 6-pin Pixhawk serial port connector. The Nimbus 1800 nose connection system makes for easy wiring to the fuselage. I have groupings for AS Sensor, 12v, Video, and PWM control to the X8R receiver. My ImmersionRC 600mw 5.8GHz transmitter is below the plane where the mapping camera resides.
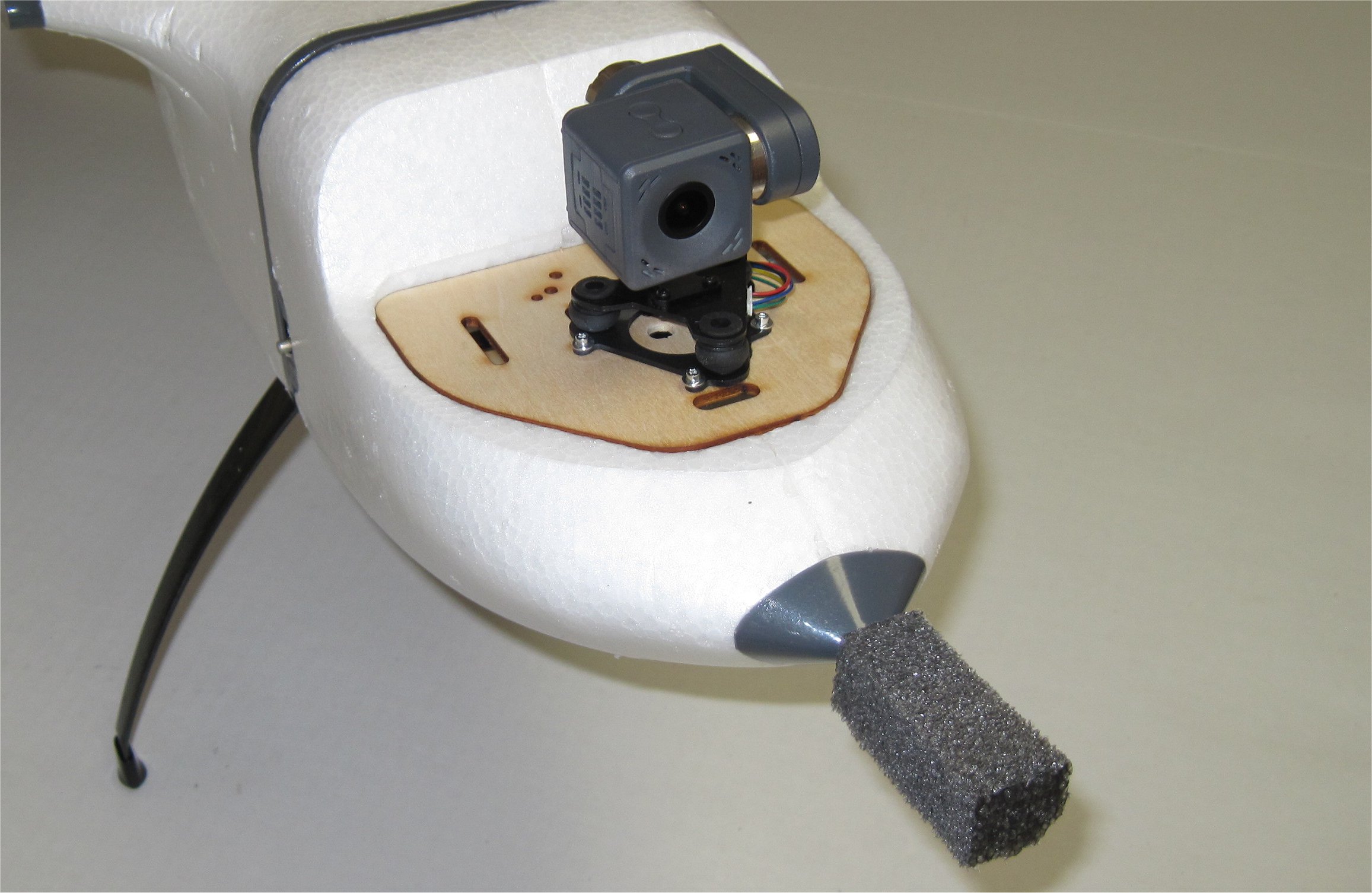
The last image shows the camera mounted on my Bix3 QuadPlane FPV pod.
Many of my VTOLs do not have AS sensors, including the FireFLY6 tilt rotor so it is not needed for VTOL. However, the AS sensor does provide more accurate wind compensation for flight modes that use autonomous speed control. On a calm day, you can’t see much difference but on a windy day, the AS sensor is best.
Here are some flights of Bob Moser’s Nimbus 1800 VTOL. I believe that he has the AS sensor disabled or at least he used to. The Q_ASSIST_SPEED =0.