I like the simple fact that the wing spars provided with the Nimbus are rolled-wrapped CF (as observed from your picture above). I hate it when it’s pultruded CF wing spars because it usually means more work to substitute them with nicely trimmed and sanded rolled-wrapped one.
1 Like
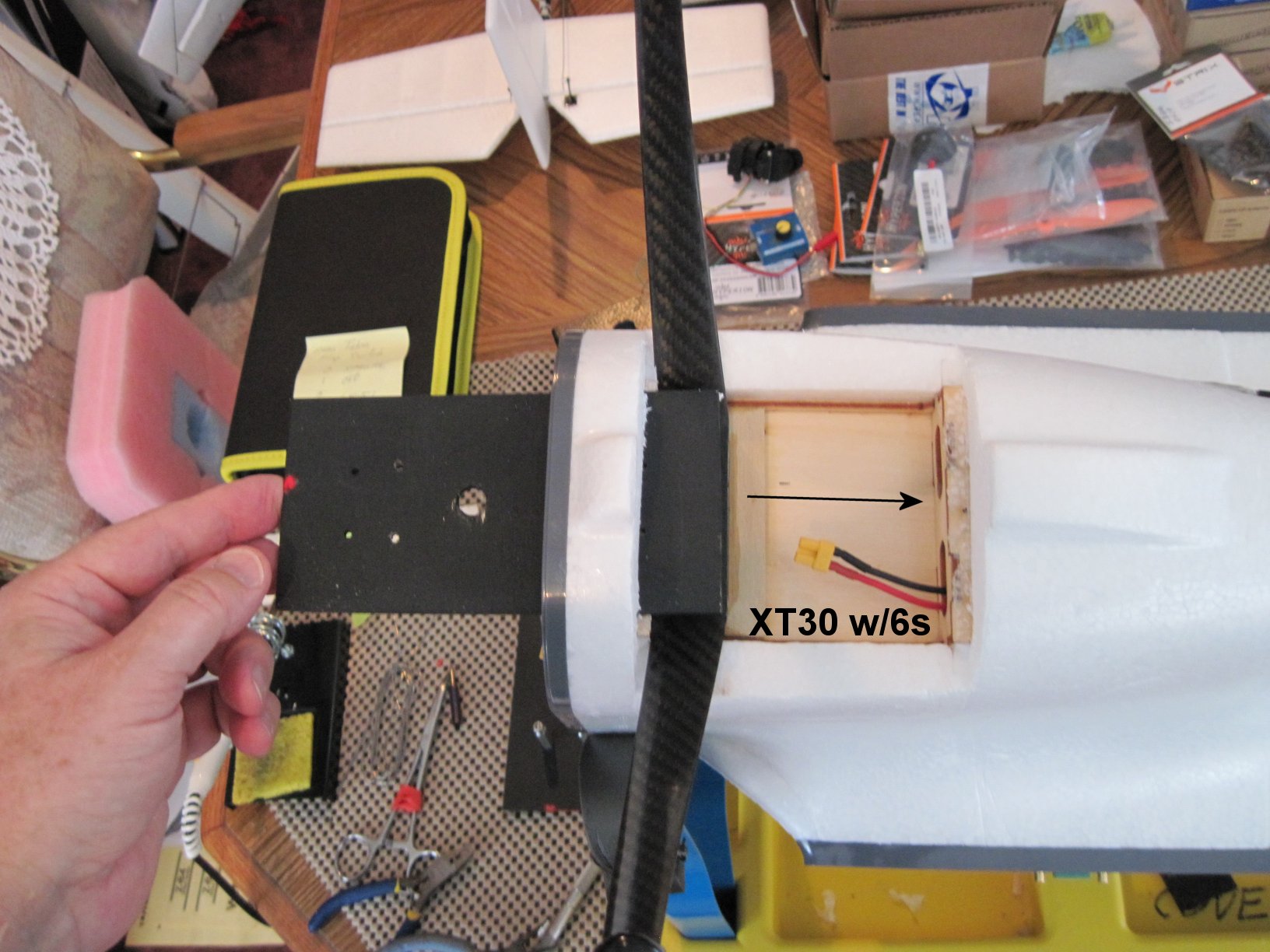
I got some awesome time off for the holidays so I installed my camera mount underneath the Nimbus 1800 VTOL. Ever since I first purchased a BEV FireFLY6 VTOL, I choose to mimic their Feiyu Tech G3 Ultra mount in a DIY form by making a bunch of aircraft grade plywood mounts that could hold all my cameras. Many of my payload capable planes have this mount installed. At one time Feiyu Tech sold a mount (shown on lower left of first photo) but they became hard to find.
By cutting a slot-like opening between the foam and bottom chassis, I could slide my mount from the front into the back and secure it with a few screws. I then added my M4 standoffs which allows for an easy way to mount any of the accessories using M4 lock nuts. A few examples shown are the G3 Ultra with Hero3 and my Canon S100 mapping camera. The added weight is very close to the CG so only a minor change may be needed at the tail for re-balance.
When I first wired up the Nimbus, I added a 6s battery line (XT30) to the belly in case I wanted to add another regulator. For now, I’ll probably use the other 12v regulator that is mounted in the battery section since it isn’t being used. It’s nice to have options!
Next up will be a lighter camera assembly added to the top nose platform…







2 Likes
Wow looking good there Greg!!!
So I have gone the route of changing my wing or tilt motors to the newer versions. I hope they will be delivered before I get back home at the end of January and at the same time hope its the end of my frustration.
Greg you mentioned your battery had slightly less weight then mine… what brand battery are you using, I may consider changing this too if I can find them locally. shipping Lipo’s is such a pain at the moment as we all know.
Any of you guys seen this yet? https://www.youtube.com/watch?v=e_b3livalsE And more importantly anyone know the specs of the additional parts, in particular the tilt servo’s (I am assuming I can use the same ones I used for my Nimbus) and motor specs I have spent a good few days searching but so far it seems all the people that know or have been successful are not sharing the information
All the best for the new year all, here’s to safe landings and low turbulence in 2019.
Regards
Chris
Hi Chris, the tilt servos are these:
One question. When I power on my VTOL Y3, the tiltrotor motors make a rapid movement going from vertical to horizontal to return to vertical position… It happens to you too? Is this normal? Is there any parameter that activates and deactivates it?
I don’t have a nimbus, but on my VTOL tilt-quadplane conversion I’ve seen similar behavior. I’ve actually had it lock the tilt servos against their limiters and burn them out, once… I did some digging and “servos moving on startup” is an issue that goes all they way back to original APM 2.x boards, not just tiltrotors. Something to do with the servo controller sending out some garbage pulses as it boots up, if I recall.
I got around it by putting a power switch in between my BEC and the servo rail of the pixhawk. So I plug in the battery, let the pixhawk boot, press the safety button to enable servos and send them neutral values, then throw the switch to apply power.
It is strange that Ardupilot has not solved it
they tell me on Facebook what could be the SERVOn_TRIM value of both tilt servos. I’ll check it tomorrow. It could be the cause
Hi Chris,
It looks like HK doesn’t sell my older 6s, 10AH, 10C packs anymore but they replaced it with a slightly heavier 12C pack below for $119.
Multistar High Capacity 10000mAh 6S 12C Multi-Rotor Lipo Pack w/XT90
I hadn’t seen Kris’ new tiltrotor project so thanks! I’m not thrilled about the rear prop facing down nor the amount of DIY work involved in the conversion.
Hi Atico,
My Nimbus does not cycle like yours, it only goes from the current position to up when I power up in QSTABILIZE mode. I assume that your transmitter is on. I am not using a safety switch and use SBUS to my X8R receiver. Perhaps you have some receiver failsafe set? Try re-binding the receiver with the desired transmitter settings…or in this case flight controller settings on the tilt servos.
Hi James,
I just saw you on TV a few days back. I’ll bet that you know what the movie was. 
Thanks for the suggestion.
Happy and Healthy New Year to All!
1 Like
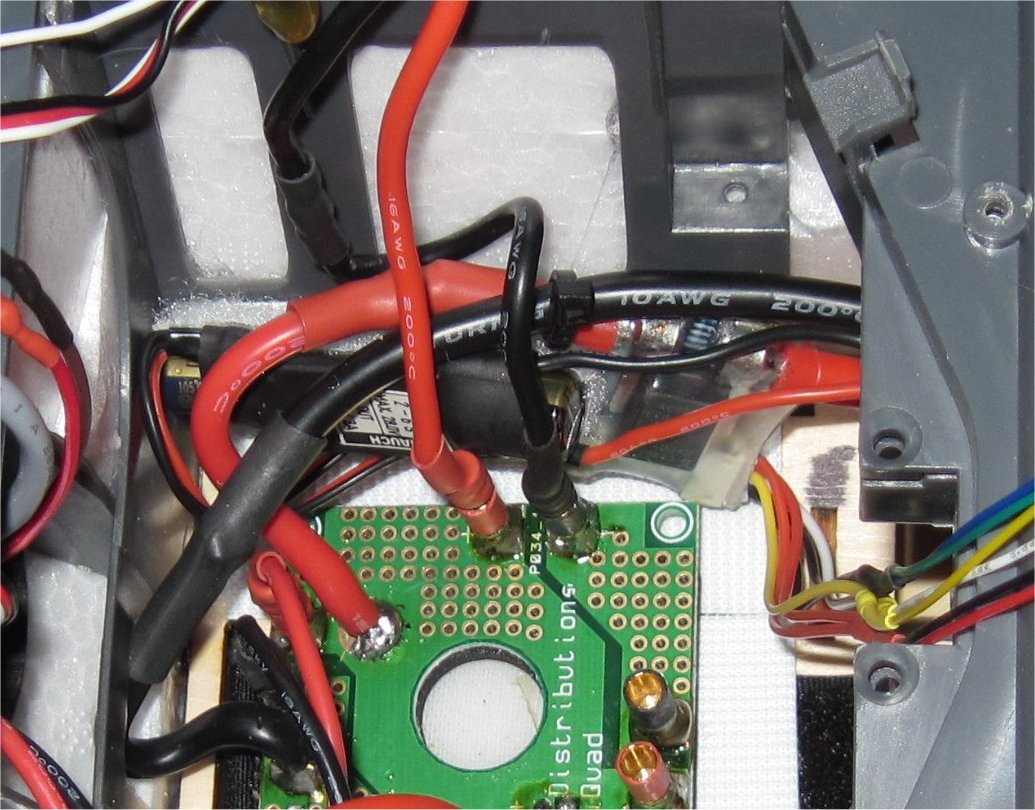
What size of cable (AWG) have you used from the pcb to the battery? I see that the current is around 30A, even with cargo being something else. 14AWG cable would be at the limit
The Mauch Power Module used the thickest wire (red #10) so I mimicked it for the black ground wire between the battery and PCB. The stock wing #16 wires should be fine for 10amps during hover.
6s 10AH LiPo Battery is #12 AWG
Mauch PM is #10 AWG
Stock Wire to ESC is #16 AWG
2 Likes
My MAUCH module is 12AWG. Yes, I think it will extend 12 awg
Aanother question, I got a Multistar LiHV 16A 1750 gr; I think the weight-current relationship is good, what do you think?
I cannot find your Multistar LiHV battery pack. What is the discharge rate?
The Foxtech 16AH Li-Ion pack here weighs 1500g and is rated for a continuous discharge current of 3C or 48amps. It makes you wonder if the PG20 Dual Battery Swapping Board is really needed. I don’t care for the $300 price.
My Multistar 6s 10AH 10C LiPo packs were on sale for $50 each when I bought them for my 1/3-scale Cub. A much better price for the hobby budget.
1 Like
Hi Greg,
I have one of these Multistar LiHV packs. It has a 10C discharge rating. However, it’s discontinued hobbyking.com/en_us/multistar-lihv-high-capacity-6s-16000mah-multi-rotor-lipo-pack.html
Hi Wasim,
Thanks for the info. The 16AH pack with a 10C discharge rate is 160amps so it would seem fine to use on the Nimbus 1800 VTOL without a PG20 Dual Battery Swapping Board.
At one time, we were looking for additional people to post their hovering current. My Nimbus measured 29amps or around 30amps using a Mauch 200amp module. Graham’s setup measured around 58A when hovering.
Has anyone else measured their hover current?
Soon I will try the first test and of course I will post the data
Hi Greg,
Out of curiosity, I’ve got a question about one of your previous posts: What are the inputs you have on pixhawk servo rail (in this build)? Am I correct in saying that you have only the signal wire for all of the components (i.e. ESCs, tilt servos etc.) on the servo rail, except for one of the ailerons, where you have both the signal wire as well as the ground wire fed on pixhawk servo rail?
Hi Wasim,
You are testing an old man’s (me) memory!  Only a few of the components have just the signal wire due to the 6v BECs in each wing. I have a 5v BEC on the AUX rail for most connections to the servo rail and a 5.7v zener diode for backup power if the Power Module fails. We have the aileron ground connection and battery ground in each wing. The aileron signal connection gets ground on the connectors but the others (ESC and tilt rotor) get only signal connection. The ground for the wing ESC and tilt rotor is through the battery feed to the wing which gets connected to signal ground at the additional 6v BEC in the wing…so they are really the same ground. It is the same as the XUAV conversion
Only a few of the components have just the signal wire due to the 6v BECs in each wing. I have a 5v BEC on the AUX rail for most connections to the servo rail and a 5.7v zener diode for backup power if the Power Module fails. We have the aileron ground connection and battery ground in each wing. The aileron signal connection gets ground on the connectors but the others (ESC and tilt rotor) get only signal connection. The ground for the wing ESC and tilt rotor is through the battery feed to the wing which gets connected to signal ground at the additional 6v BEC in the wing…so they are really the same ground. It is the same as the XUAV conversion

2 Likes
And you’ve passed with flying colours ![]() … Thanks Greg. Appreciate the info.
… Thanks Greg. Appreciate the info.