To combat this effect, you can do your testing on calm days. This essentially makes an AS sensor reading the same as the GPS ground speed…with exceptions of extreme altitude change. You can also increase throttle to power your way past the transition and decrease the Q_TILT_RATE_UP value by half.
Yes, I have had this experience with many of my VTOLs until I get enough turning capability to suit my needs. When flying in a limited area, it can feel like the plane takes forever to turn. Many of my initial turns have been very very wide but I could at least tell that it was turning with full aileron stick so I puckered up and watched the show. You can combat this by increasing your MIXING_GAIN from 1.0 to 1.2 and increase the MAX/MIN value of your ailerons.
What I do is connect with MP or QGC and then change SERVO1_MAX and _MIN value by 10 and see if the control surface moves more. If not add 10 more and repeat. Remember to have your transmitter right stick pulled left or right to see the change in throw.
This can also be done with your elevon outputs. SERVO2 is VTailLeft and SERVO4 is VTailRight, if needed. Do not do another radio calibration or it will negate your increases.
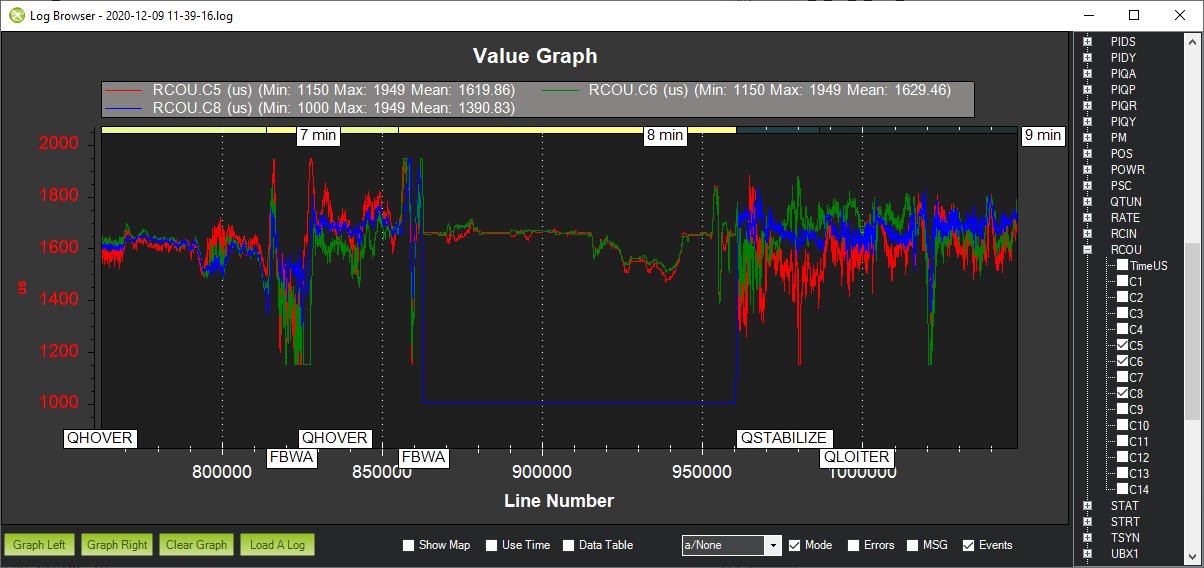
It did not. The blue line below is your tail rotor and it remained off in FBWA mode.
Hi Greg,
Hmm, I have reviewed my Parameters - interesting they show servo-trim-auto @ 1 (where it should be, but not during the flight). Also my Q-alt-assist @ 0 (Not where it should be) . This is something I’m definately going to have to look at further!! As they are both setting I have checked in the past, and sure I’ve never changed. I have been “Mucking around in SITL” and I wonder if at some point I have been connected and written SITL Parameters - Not even sure if this is possible.
Greg I’m sure your following the new posts reguarding transition yaw, and other VTOL flight characteristics this is exciting and to have a Number of Leaders engaged in the thread which is also on Discord.
I had not been reading the transition yaw thread so thanks for the nudge. My Nimbus and Convergence both have older firmware in them that seems to work fine and my MFE Freeman (where I did notice it) had the issue eliminated by switching to their custom firmware. All my other VTOLs are quadplanes or non-APM controllers.
On the SERVO_AUTO_TRIM parameter, check your flash card and make sure that you have a good Class 10 card installed. I know that Tridge fixed the reading issue with slower cards years ago but I have always tossed the cards that come with my Pixhawk 1’s and use a SanDisk Ultra Plus card instead.
Before your next flight, you can simply check the value in MP or QGC. This reminds me that when you load a mission for an automated flight, always read it back into the GCS to be sure that what is in the flight controller matches your plan.
Greg, i used servo trim on my trainer but it was in Manual mode only. I read the documentation again, it appears to work as a trim assist in Manual mode rather than FBWA. Why would trim auto setting change anything here? FBWA is an attitude control law and supposed to trim automatically anyway (as in you hold your pitch input the airplane tracks a certain pitch attitude without need for manual adjustment).
Another thing for discussion. Steven Young mentioned his Q assist setting. I’m not sure if attitude assist is available for our Nimbus tilt Y3 configuration. I read the documentation several times and have the impression that it’s for the 4+1 Quadplane config only. For assist to work, the control law would have to somehow reconcile the need for fixed wing forward thrust and then tilt up to vector up some thrust to contribute to attitude control. It is not possible to do one thing without affecting the other.
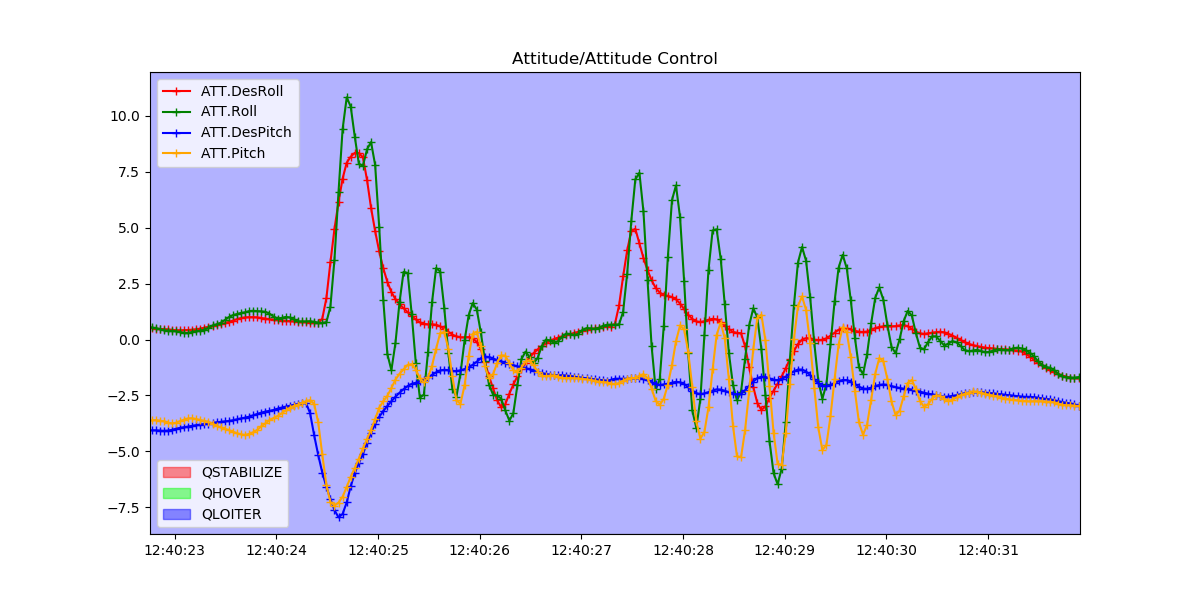
separate question: had a little test flight today with my Nimbus build. I found that even under calm conditions in QLoiter/QRTL mode, the plane sometimes had roll oscillations around roll command which has maybe 3Hz frequency and all eventually converged. I can excite this mode by putting the plane in a side step motion and reverse roll stick to stop the side step. Although this eventually converges, it looks scary and probably will do a number to the airframe if I allow this to continue. Plots below:
Qloiter:
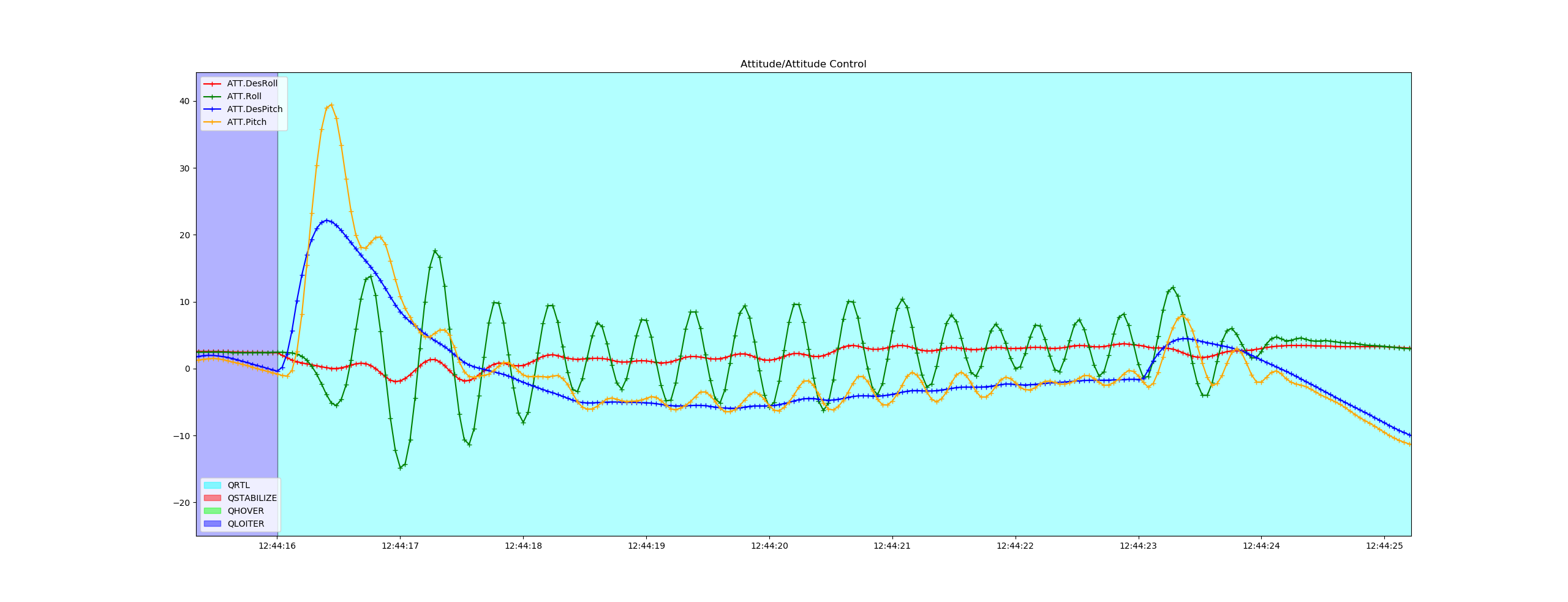
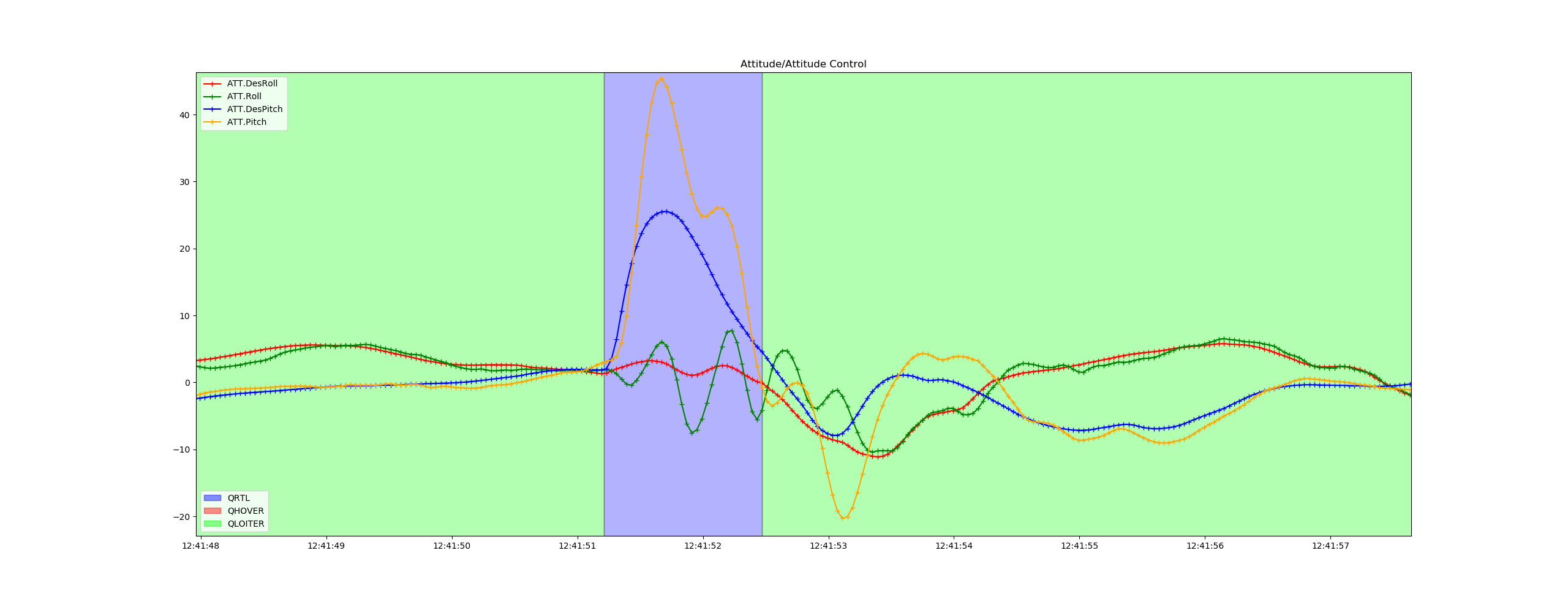
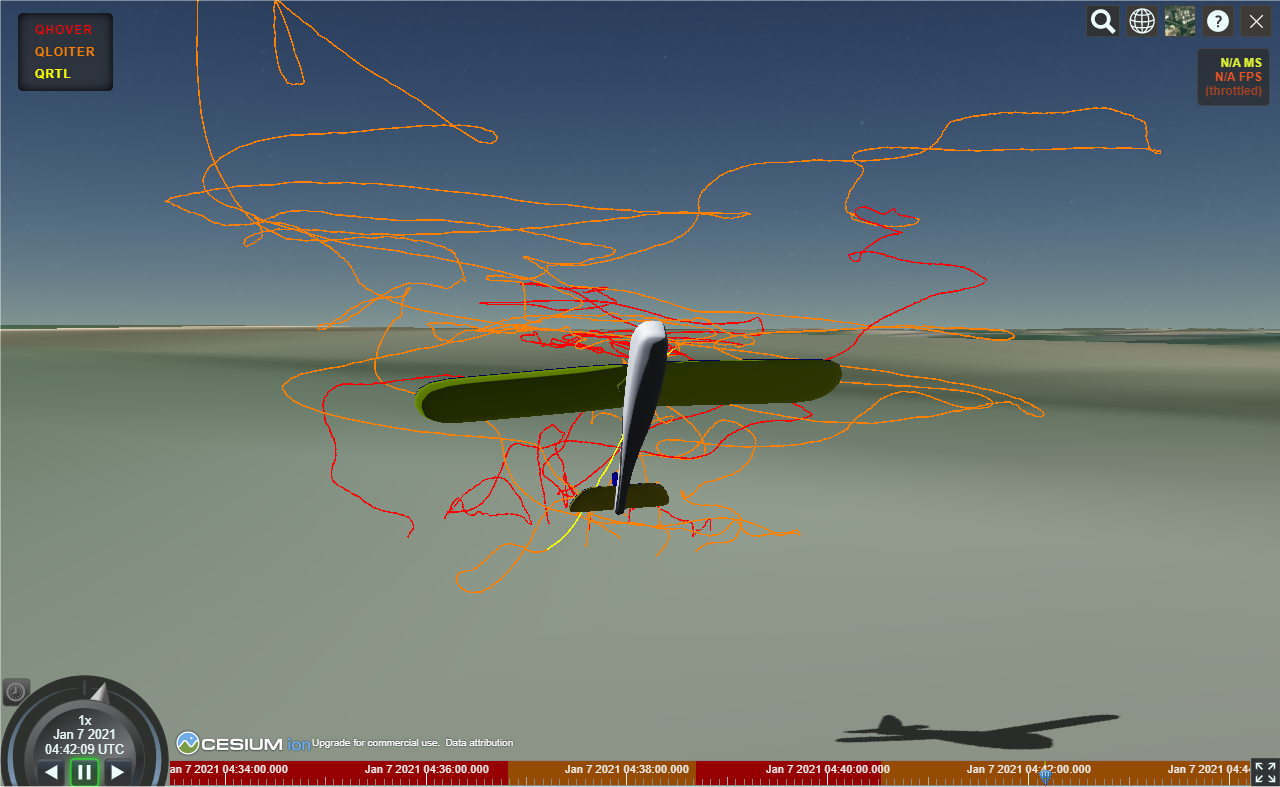
there’s yet another thing with QRTL behavior, where the plane always pitches violently towards home position when the mode is activated. you can see this in the QRTL plot. It happens every time. Is there a way to tune down this highly unnecessary tendency?
Qstabilize and Qhover work fine. only when position control is introduced did these problems occur.
My PIDs are the same as Greg’s V3 param. I did a full param check when setting this plane.
FBWA will always rest back at the trim levels, which may not be correct. SERVO_AUTO_TRIM slowly moves the trims (while flying) to the level position set by the ACC in Mission Planner or QGC. The SERVO_AUTO_TRIM parameter will constantly monitor how much it needs to correct the flying trim to maintain level AHRS pitch and roll while in throttle controlled modes (AUTO, CRUISE,etc.) or FBWA.
It also corrects for changes in your plane’s CG and setup (control surface changes, warping, fuel loss, etc.). There is no harm in leaving it on. Without SERVO_AUTO_TRIM set to 1, read Tridge’s tip below.
I believe that it works for all quadplane and tilt-rotor setups…just like the other Q_ASSIST parameters.
When QRTL mode is selected, the QuadPlane will immediately navigate towards the home location at Q_WP_SPEED, climbing or descending towards the Q_RTL_ALT altitude.
Warning: In QRTL mode the autopilot uses a barometer which measures air pressure as the primary means for determining altitude (“Pressure Altitude”) and if the air pressure is changing in your flight area, the copter will follow the air pressure change rather than actual altitude.
Perhaps your altitude when you invoke QRTL is not close to the Q_RTL_ALT setting.
It looks like both your Pitch and Roll are oscillating. Try reducing the settings below by 0.05 each.
Thanks man that’s not in the documentation so I guess I’m free if the RTFM crime. I’ll turn it on.
However, looking at the physics of a tilt rotor y3, I have trouble imagining how attitude assist can occur without seriously affecting forward thrust control, because they’re controlling from the same two parameters, ie., Tilt angle and motor throttle. Whereas on a 4+1 it’s decoupled and more easily done. I haven’t transitioned yet but I think I’ll have to rely on a quick flip back to qhover if things get out of hand. Does anybody here have an experience with Qassist on the nimbus config? Maybe I should create a new post.
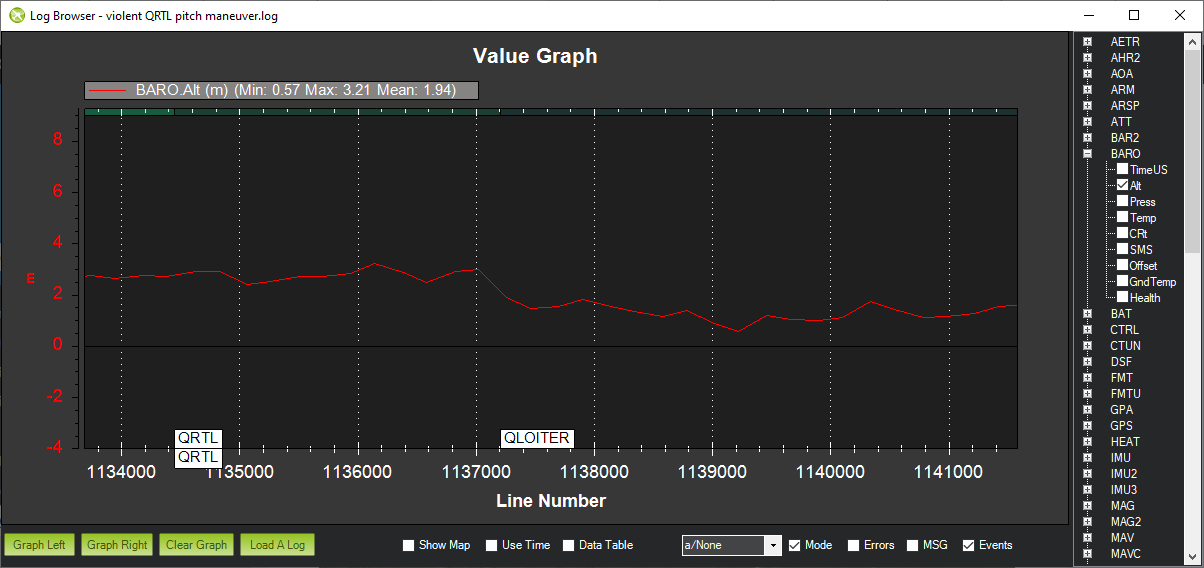
[edit] i dialed in reduced P gain and flew again in a stiff wind. i can no longer reproduce the roll oscillation in Qloiter, but the violent pitch maneuver when activating QRTL. This is after I cut the RTL horizontal acceleration by half to dampen the plane’s enthusiasm if you will. I looked at the log this time and decided that i have a pitch overshoot problem not oscillatory modes. I will dial up a little D gain for pitch channel and see what happens.
yeah, I checked the log the plane is behaving correctly in terms of trajectory in QRTL. it slowly climbs to the desired Q RTL ALT and was able to descend at the expected rate. However, it is the ‘starting’ and ‘braking’ attitude commands that are excessive. The plane wants to pitch violently towards the home location and pick up speed towards WP Speed, but i’ve lowered this commanded speed to 4m/s and certainly do not want the plane to pitch 40 degrees in order to pick up that speed, fearing damage to the airframe. I will lower the gains as you suggested. my original plan was to simply copy paste your gains and skip autotuning. maybe it’s needed after all.
Oh, it will not fly well but it will stay in the air. That is why you want to set the value to be around the stall speed. My Q_ASSIST_SPEED is still set to 0, which is recommended for the initial flights. I haven’t found the stall speed on mine yet as it seems to fly fine even at my lowest settings.
I don’t think Autotune or QAutotune is the issue with your QRTL surging. Check your THR_MAX value. If it is 100 then try 70. Verify that Q_WP_SPEED is around 500, not 2000.
sure, link to last flight after dialing down P gains for pitch and roll. log file
it has one episode of QRTL which lasted for only a second before I had to cut it back to Qloiter. That was some overshoot! Note that my Q WP SPEED is 4m/s, i dialed that down even before I found the response problem. I think I need autotune in copter mode to improve the gains. what worked for you guys probably didn’t work for my particular motor characteristics, rotational inertia, etc.
airspeed is live, but windspeed and direction plots are pegged at zero.
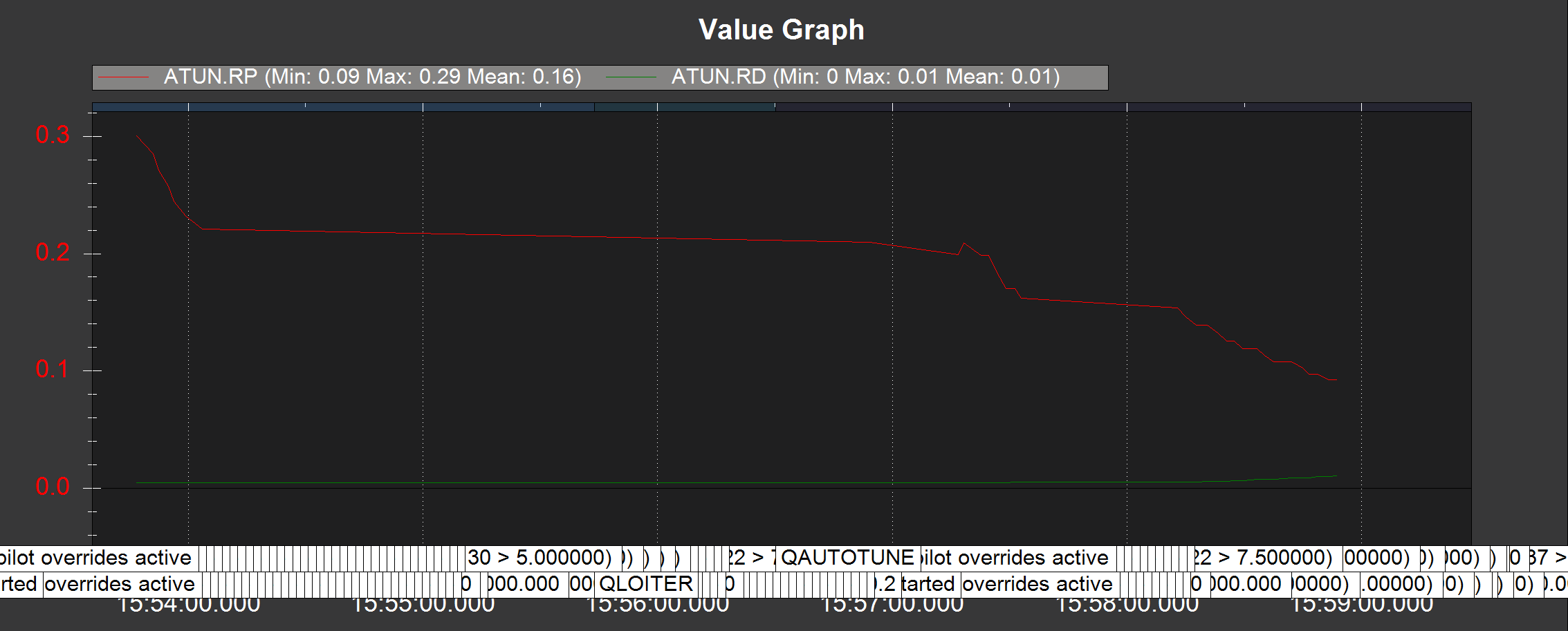
not autotuning, but PID plots show all gains were constantly changing…I’ve seen this before. there might be a difference between the RAT_PIT_P gains we talked about and the PID or PIQ plots available in the log.
Thanks for the .bin file. Something is going on here that I can’t fully explain. The plane does point up and then starts to fly backwards when you invoke QRTL. This may be because you are not pointing to home and the plane is trying to stop. You could try a test where you are pointing to home and then invoke QRTL. It would also be wise to be downwind so that the nose of the plane is facing the wind for stability. Your Q_WVANE_GAIN setting is currently at 0.
It seems that QRTL is only valid for about 3 seconds before you switch to QLOITER mode. The first two images are when the plane flips up on QRTL and the third image is when it is going backwards in QLOITER mode. The second image is looking down from above.
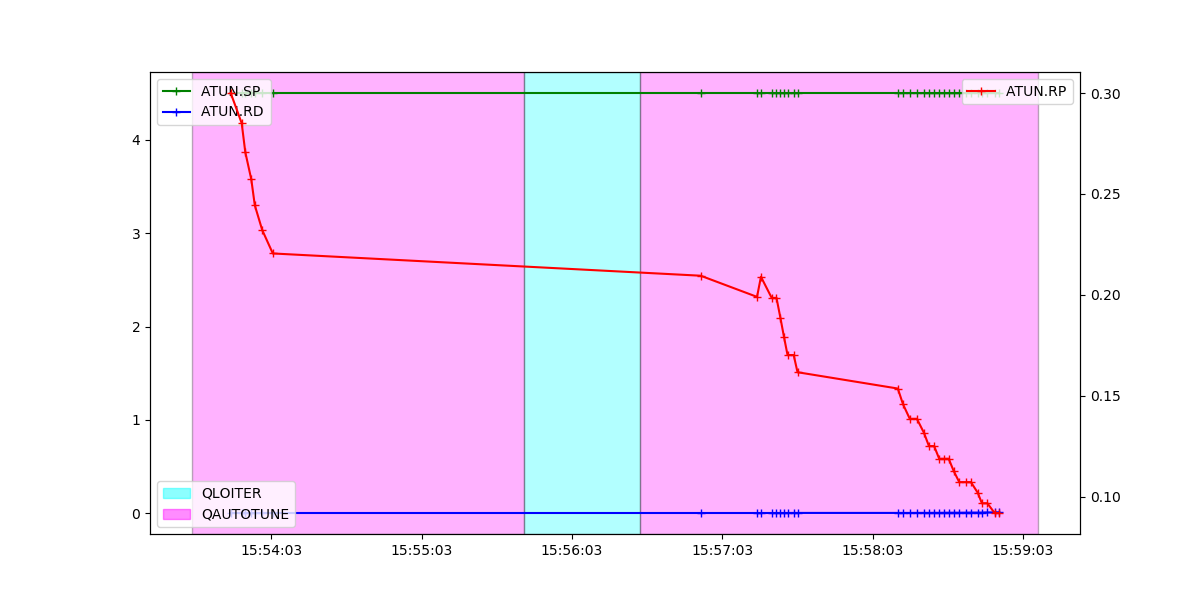
[Edit]: replaced attitude tracking plots with gain plots
thanks Greg. you’re right in this case the plane is pitching up because i had to put the plane in a tail-on attitude to make sure i wouldn’t be disoriented if i had to recover manually, which happened frequently. Due to the limitation of obstacles nearby, it is safer for the drone to face the wind (not via auto weathervaning) and pitch up to go back home. QRTL trajectory is okay as far as altitude and position are concerned, but the pitch attitude response is unsatisfactory. Too much overshoot. I don’t think QRTL gives the wrong pitch order, but the airframe response to the pitch order needs tuning.
I did three, four Qautotune flights in the pitch axis and it looks like the tune is unsuccessful. RAT pitch gains never changed after landing and disarming while in Qautotune mode. I checked DesPitch and actual pitch plots but it looks like DesPitch does not incorporate Qautotune command, so it just showed a couple of spikes (twitches). MP plots the gain changes along with the messages but the messages are hard to see as they overlap each other on the axis.
I had to cut back to Qloiter this time as the maneuver turned quite violent and involved roll and yaw changes as well. I think Qautotune may not work for me, but so far the current gains provide for a very flyable handling quality. I have no problem controlling the drone in any of the Q modes, even against a stiff wind. It is only when the pitch command is very abrupt, such as those of QRTL, that the response is unsatisfactory. Even then, pitch down to go home behaved better than pitching back to go home.
https://1drv.ms/u/s!Auv-5QlGCPQop3HtYLJ_uIParQEW?e=aqwnvS
Password = Password if required.
Logs and video from my flights today a bit of FBWA and a second flight of Loiter. Really happy with performance however I do need to change Max speed 24m/s is way to fast for me. actually calculating airspeed calibration - manual a/s 18m/s = GS of 16.75. So I’ll have to adjust my ratio from 1.77 to 1.54. and I will change my Aspd max to 21. Servo auto trim makes flying so much easier and my Q_Assist modes all appeared to be working well. I got plenty of warnings in FBWA . Transitions were ok - not concerning but a little ugly. In my long Loiter flight I even managed to relax enough to follow MP on the laptop and change loiter settings. Simple mission is next from manual takeoff.
spetsnaz26, I’m definately a beginner but my understanding is if changing from Fixed wing mode to a Q_Mode. QRTL and QLoiter use GPS so tries to gain immediate stationary Hover, which causes the ‘unsatisfactory behaviour’. Q-Hover doesn’t use GPS so is much gentler and glides to the hover whilst maintaining altitude > Nil aggressive pitch. Just a thought
thanks. i started QRTL while stationary so it was just the plane’s failure to properly track a pitch command. it’s damped well and does not oscillate, but overshoots way too much. I will manually tune the PID following the guide in the doc.
hey people I had my first successful transition today to FBWA and flew a few minutes without any major problem. I did however had violent roll and yaw oscillation during the initial few seconds of the transition into FBWA, and it looks like the VTOL servos got into a constant amplitude oscillation with a phase diff of 180 degrees. it did converge later when speed picks up. I don’t have access to my param right now so I can;t plot the RC outputs, but a working theory is a PID problem that turned manageable yaw error into a borderline accident. I’ve not heard anyone else talking about it in this thread so I will look around elsewhere, too.
FBWA was okay, if sluggish. I flew FBWA with my small fixed wing trainer a number of times before, including once with aft CG, and the control characteristics is not that different. There’s a constant need to put int nose down stick probably because my autopilot level is set a few degrees too high, at least for the speed i was flying at (~60mph, crazy!). I had several stall accidents before, and instinctively carried too much speed.
with one 6000mah battery (whopping 853g). my hover throttle is 35% and current 25A. while flying in fixed wing mode my current draw isn’t much lower, probably because I was gunning for high speed. as I get more experienced and more confident, i will try to loiter around at a more economic speed, maybe something like 16m/s or so.
hey people in case anyone’s bothered by the same transition yawing/rolling instability, before the developers come up with a formal fix, just make sure your q tilt max is small enough. I was using 65 and got into violent oscillations. I then changed it to 40 and the transition is free from oscillatory motions, although there is now a strange left yaw tendency which can be checked by yaw and roll control.