spetsnaz26, I’m definately a beginner but my understanding is if changing from Fixed wing mode to a Q_Mode. QRTL and QLoiter use GPS so tries to gain immediate stationary Hover, which causes the ‘unsatisfactory behaviour’. Q-Hover doesn’t use GPS so is much gentler and glides to the hover whilst maintaining altitude > Nil aggressive pitch. Just a thought
thanks. i started QRTL while stationary so it was just the plane’s failure to properly track a pitch command. it’s damped well and does not oscillate, but overshoots way too much. I will manually tune the PID following the guide in the doc.
hey people I had my first successful transition today to FBWA and flew a few minutes without any major problem. I did however had violent roll and yaw oscillation during the initial few seconds of the transition into FBWA, and it looks like the VTOL servos got into a constant amplitude oscillation with a phase diff of 180 degrees. it did converge later when speed picks up. I don’t have access to my param right now so I can;t plot the RC outputs, but a working theory is a PID problem that turned manageable yaw error into a borderline accident. I’ve not heard anyone else talking about it in this thread so I will look around elsewhere, too.
FBWA was okay, if sluggish. I flew FBWA with my small fixed wing trainer a number of times before, including once with aft CG, and the control characteristics is not that different. There’s a constant need to put int nose down stick probably because my autopilot level is set a few degrees too high, at least for the speed i was flying at (~60mph, crazy!). I had several stall accidents before, and instinctively carried too much speed.
with one 6000mah battery (whopping 853g). my hover throttle is 35% and current 25A. while flying in fixed wing mode my current draw isn’t much lower, probably because I was gunning for high speed. as I get more experienced and more confident, i will try to loiter around at a more economic speed, maybe something like 16m/s or so.
hey people in case anyone’s bothered by the same transition yawing/rolling instability, before the developers come up with a formal fix, just make sure your q tilt max is small enough. I was using 65 and got into violent oscillations. I then changed it to 40 and the transition is free from oscillatory motions, although there is now a strange left yaw tendency which can be checked by yaw and roll control.
The Q_TILT_MAX works in combination with the Q_TILT_RATE_DN and FBWA_MIN settings. Having a higher Q_TILT_MAX (like 65) works in conjunction with a slower Q_TILT_RATE_DN and lower FBWA_MIN setting.
So for a tilt-rotor, the motors will tilt to the Q_TILT_MAX setting at the rate of Q_TILT_RATE_DN to build up air speed until the FBWA_MIN setting is reached. These numbers will vary on your plane setup and power level.
You can also play with the Q_TRANSITION_MS setting. I think lowering the value (in milliseconds) lets the plane start flying normal faster.
makes sense. Goes to say it takes quite a bit of tinkering and thinking to get it right. I will do more test flight in the coming days to practise transition.
One thing though, I re-read that page about transition, and the part about tiltrotors are mixed in with quadplanes’. It says that if you go less than half throttle, the rotors will tilt backwards. I wonder how this will affect transition. It looks like you have a certain degree of freedom to transition more slowly by commanding less than 50% throttle, and effectively use a less than Q Tilt Max angle, and it will take longer to reach minimum speed. then it will go down at Tilt DN rate. My problem now is that the motors are over-powered. They maintain hover at 35% throttle or so, and if I maintain 50% at transition, this thing bolts forward at 0.8g and reaches interstate speed within seconds. I don’t want go that fast, and I want to find out if there’s a technique to reach more economical speeds more smoothly.
I’m hoping for some assistance - After several successful flights I took the nimbus out today and didn’t get of the ground right tilt servo does not appear to be working. I have reloaded parameters and reloaded Arduplane 4.0.7, with no effect. I have attached the Bin and Parameter files for perusal. Next plan is to swap the L&R tilt servo leads on the pixhawk to try and identify the fault. My knowledge unfortunately for interpretting the logs is limited.
User Error - Or issue when playing with SITL Servo 10 - had changed to 10 from 76 - I had just reinstalled my MAP-02 so probably as part of that process…Anyway certainly something to be said for Preflight checks - we live to fly again…we live and we learn.
Those are two different functionalities. Typically, I always use the SERVO_AUTO_TRIM function to keep the plane flying level. However, I have never used QAUTOTUNE and have only used AUTOTUNE on one small foamie called the Wing Wing Z-84. If my VTOLs need a tweek due to some wobble or slow response, I land and make the adjustment and send it back up. It’s rather old school but helps to keep me safe.
i used autotune in both helicopter and fixed wing mode. Q didn’t work for me, but fixed wing autotune apparantly had some success tuning up the roll P gain. you need to read the documentation closely as it can inadvertently tune into unstable territories.
New to this group.
Awesome information here. I’m waiting for Nimbus kit to arrive and start building.
I have moved from Pixhawk to Matek FC’s the last few years on some of my previous builds.
Has anyone build a Nimbus VTOL yet with a Matek F765?
@GregCovey thanks Mate.
Been busy building and flying a few quads and hexacopters as well as fixed wing fpv platforms.
Haven’t been doing a lot of building or much flying the last few months due to international work commitments.
Been following the Nimbus VTOL project with interest.
Definitely going to be hitting you up for more info and advice in the future.
Now that i can sort of fly safely i set my priority to reducing drag and weight. i looked into my past flights in detail. In regards to the current draw, i’m showing that at an (poorly designed) weight of 4.5kg without payload, my hovering current draw is around 27A. fixed wing current draw varies between 8-10A at a relatively slow speed of 65-70kmh. This seems to indicate a ridiculous lift/drag ratio of 2.5, probably close to a space shuttle, assuming linear relationship between thrust and current draw. I am surprised that i’m apparently drawing less current than you and others were doing, considering that my setup is currently very unrefined and needs a serious weight loss.
I’ve done my homework, tho, on the selection of propellers and motors. I use Sunnysky X3120-9 with APC 1365E, and a rear motor of different spec: Tmotor navigator 4012-11 and Tarot 1555 collapsible rotor. this is one or two steps smaller than some people use here but i just don’t see the point of using X35XX class motors when I can achieve hovering with 35% or so throttle.
i’m currently using one 6000mah Rfly 75C battery, weighing over 800g. even at 75C, the voltage sag is significant. I had to come back to land when voltage is indicated at 21V. after landing, it bounced back to over 22. I’m considering Foxtech’s 16Ah bat, but its 3C rating makes me concerned. My peak transition current had been as high as 90A for a split second. i’m not sure about its impact on power output when I come back to land at a lower voltage.
When you compare apples to oranges, you get different results. Your low current reading is likely due to your 75C pack. Less voltage drop equates to less current. My Multistar 6s 10AH pack (42oz / 1.2kg) is only rated at 10C.
A typical VTOL mapping flight uses very little hover time. So the approximate 30 amps of hover power doesn’t hurt my 100amp delivery pack or your 450amp delivery pack. If you plan on doing more hovering, maybe for training or demos, etc., you can plan on this, if needed. For the large part of the flying duty cycle, the plane is flying forward so the current draw is less than 10 amps.
You can change the THR_MAX to reduce that 90A spike or even lower your ARSPD_FBW_MIN setting. I am using 10.
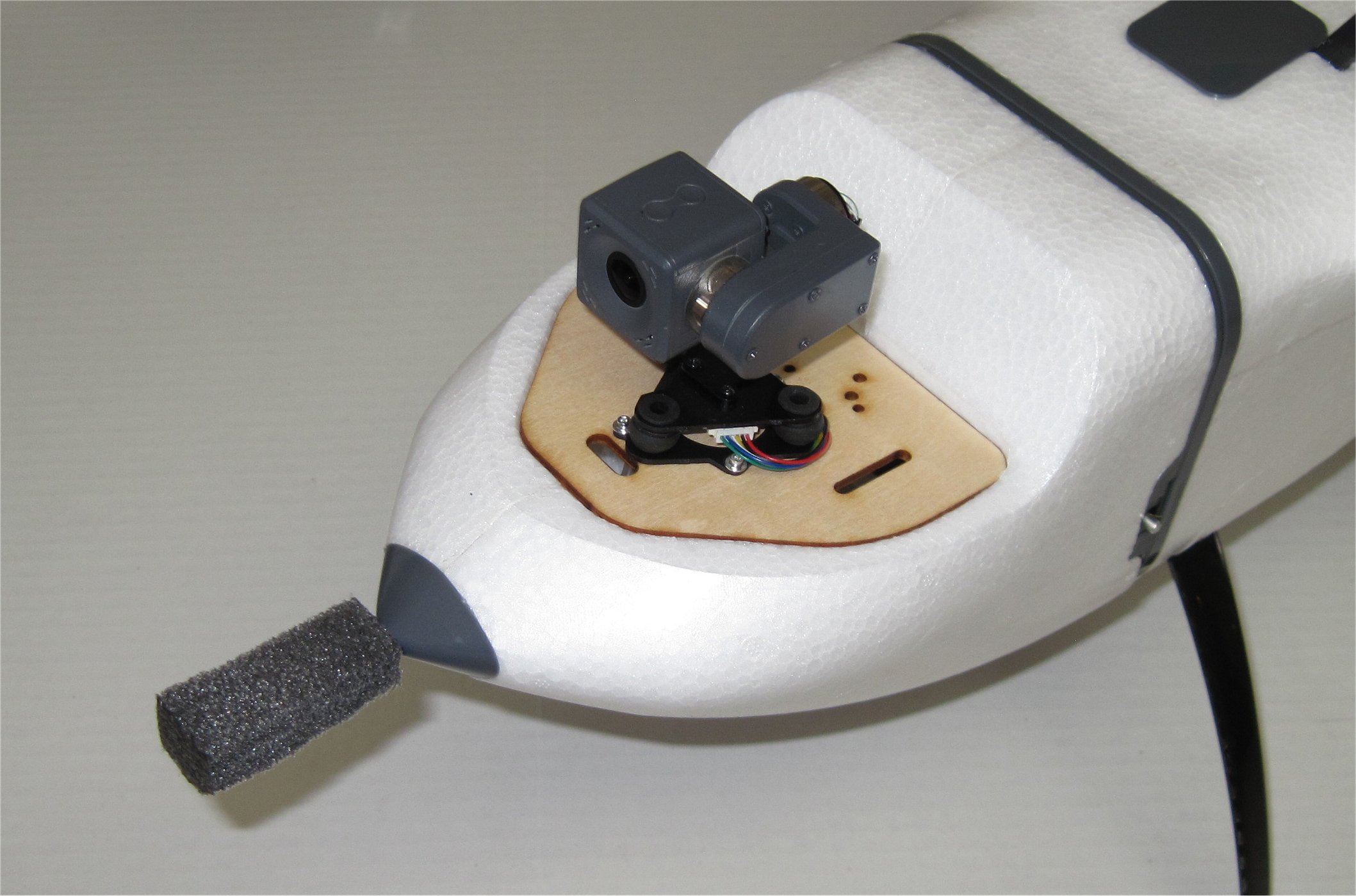
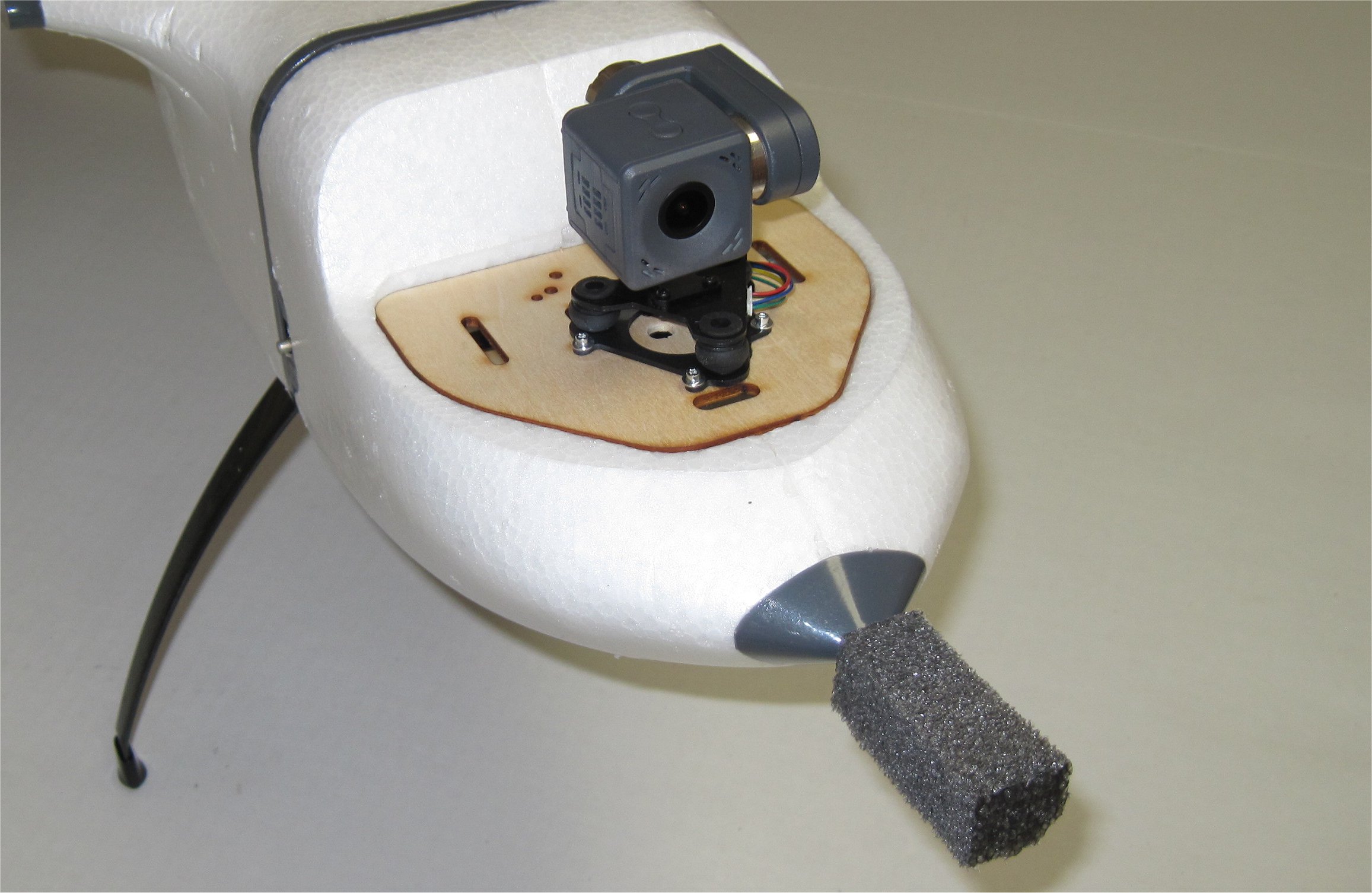
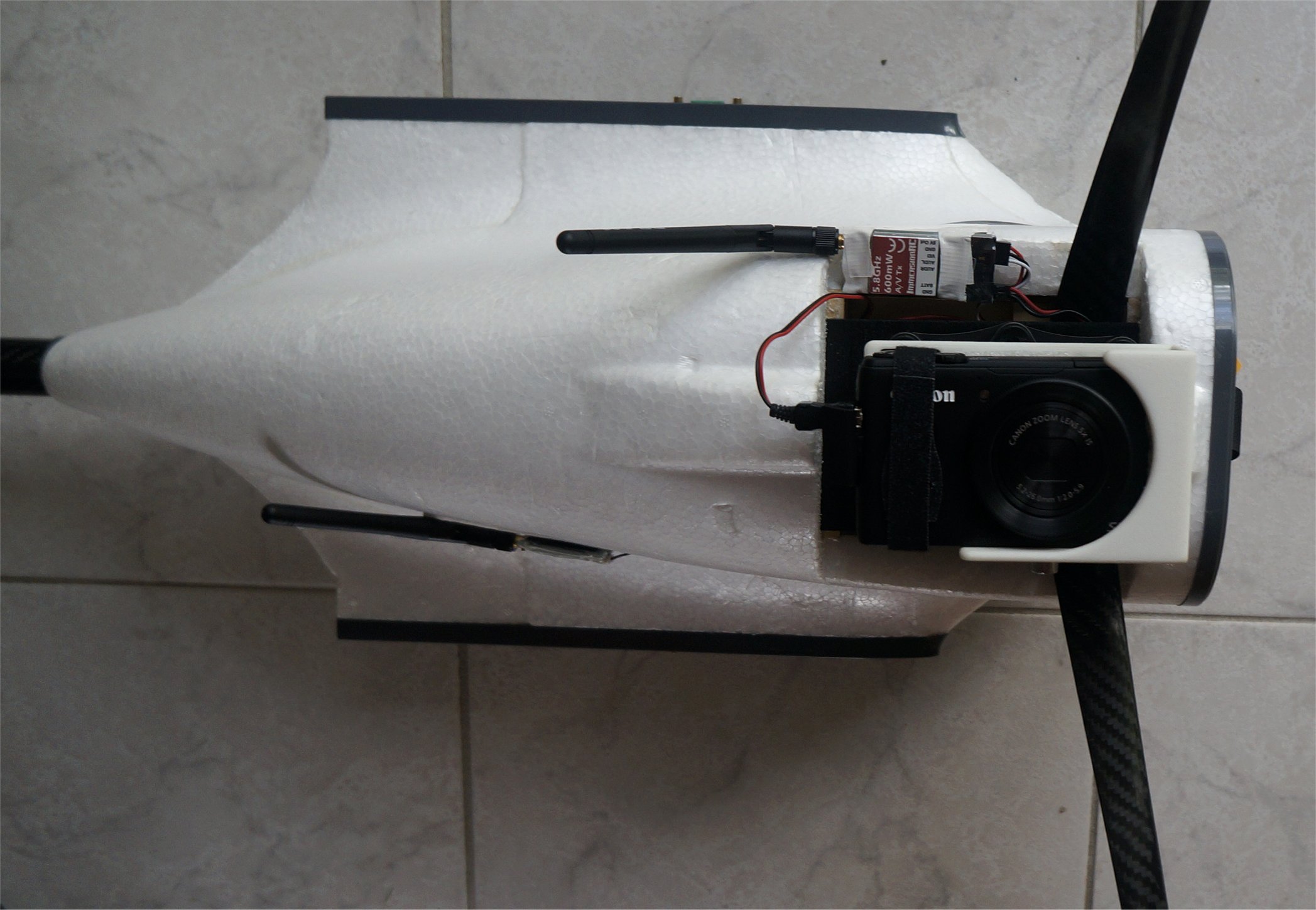
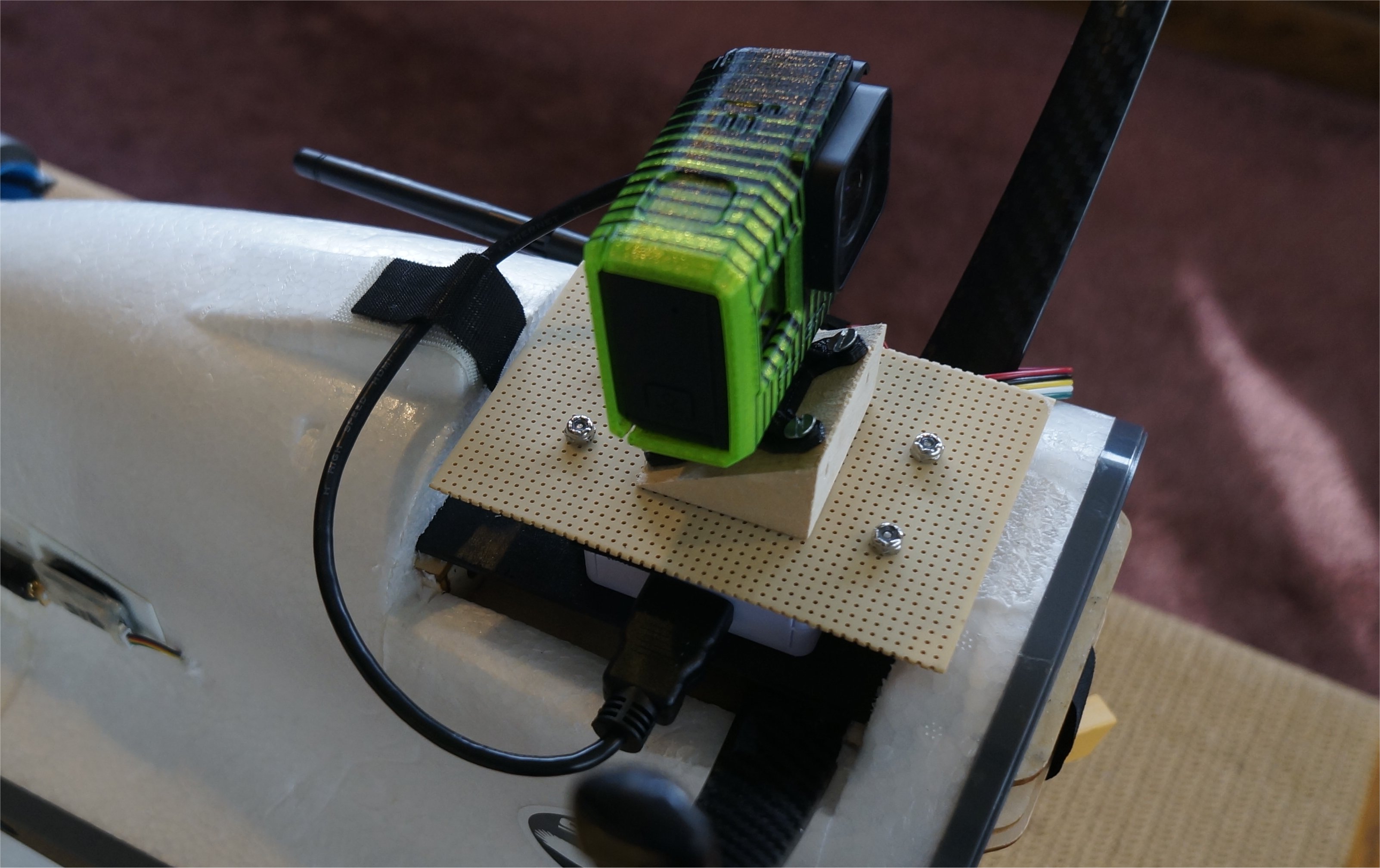
Are you planning on putting any payloads on the Nimbus VTOL? I always have the 2-axis Arkbird gimbal and camera (80g) on the nose and then swap between my S100 mapping camera and my GoPro H7 Black with Hypersmooth stabilization (196g) for scanning. The extra weight is about 276g (10oz).
Hi everyone, Im from Peru and I buy a nimbus 1800 vtol. When I bought the frame I got a circuit which I don’t know how to connect. Hopefully you can help me. I am attaching a reference photo.