Hi Ron,
as far as I can say for my Foxtech Nimbus, the three ESCs are controlled via 33,34 and 36, respectively, so you are guessing right about Motor4.
Hope this helps.
Cheers!
Hi Ron,
as far as I can say for my Foxtech Nimbus, the three ESCs are controlled via 33,34 and 36, respectively, so you are guessing right about Motor4.
Hope this helps.
Cheers!
Hi Petrou,
Re reading this thread and found this link, thankyou. I will give these 4.0.1 Parameters a try. Have you manged to get your nimbus back in the air or have you decided on another build?
Steve
HI All,
Just a little positive update, I have recieved my 14Ah 15c battery and tomorrow will go do a longer test flight in Q mode. As for my previous concerns this what I have found out through discussion with Tridge. The 4.0.1dev used for my Foxtech is not the current master version and is less stable- this was identified due to the Q-yaw functioning when on the ground when in 4.1.0.(foxtech version) This has been removed form 4.0.x stable versions and disabled in current 4.1.0 master. PG20 can be set to either 0 or 1 in servo 7 depending and once set remains or by passed if using a single battery. I have not had any further issues with this. I’m hopeful that the source code will be released to the development team soon.
Congrats, Steve.
I had a similar experience during my maiden. A bit nervous, but worked out of the box and hovered stable. As you, I haven’t had the nerves to go into transition or cruise yet. It’s a bit cold here and not getting better for flying.
Almost 6 minutes of hover is not bad for the battery, as I measured around 40 Amps at hover. What type of battery are you using ?
I realized that you seem to have a similar issue with disarming as I had. Only randomly I could disarm via the RC controller.
Steve,
It looks good so time to let her rip! Remember to do your initial transitions up high on a calm day. If you detect a problem, simply change the mode back to one of the Q modes. For initial transitions, I put QSTABILIZE on both ends of my FrSky Taranis/Horus knobs. In this manner, I don’t need to remember which direction to turn it in a panic. Also, I tend to use QSTABILIZE and FBWA modes because I fly both copters and planes so I am comfortable with more control. Others prefer QHOVER or QLOITER modes.
Good luck!
Hi
Pascal,
The battery I’m using ATM is a 14Ah 15c (so I can bypass the PG20) - I’m thinking I’ll get about 10min of hover drawing about 54 Amps in the hover @ 5-5.2kg ( the good thing is both battery options provide the same CoG. Ha yeah the disarm was interesting - and totally my fault. It does disarm fine as long as I leave it in low left for a full ?2secs.
Greg,
I’m happy to have Q-stabilise my 1st RC was a 4ch Copter and I spend a bit of time with my P4P in atti mode just for skills practice. I have Q-Stabilize> Q-Loiter and Q-Hover then toggle second switch into FBWA > Loiter >Q-Stabilize. Which means either 1 or both switches down will put me in Q-mode.
As for FBWA v FBWB for first flight ? With FBWA what parameters should I be looking at for THR_MIN and THR_MAX, my two concerns are flying a 30m/s and it getting away from me or putting her into a slow stall, with poor manual throttle inputs.
Steve,
I prefer FBWA and don’t use CRUISE until I have tested everything out including the AS sensor. Assuming that you have plane flying experience, you’ll be fine with FBWA. It gives you more control. Make sure that SERVO_AUTO_TRIM is set to 1. I typically fly FBWA at half throttle and then vary the speed if it keeps climbing or descending.
These are my THR_MAX settings:
THR_MAX,70
THR_MIN,0
Be prepared for shallow turns on the first few flights. You can adjust things to your preference with the MIXING_GAIN and SERVOx_MAX and _MIN setting for aileron. My MIXING_GAIN is set to 1.0.
I haven’t stalled mine yet and my automatic settings for FBWB and CRUISE, etc. are below. I try to adjust them so mid-throttle speed in FBWA is similar to the auto-throttle modes…around 15m/s. If your plane is heavier or for the initial flights, you may want it set higher.
ARSPD_FBW_MAX,20
ARSPD_FBW_MIN,10
Good luck!
Greg have you noticed any tendency to pitch up or down during transition? I imagine if I don’t have VTOL trim set differently from fixed-wing AHRS level trim, then I will have to hold stick back during transition or the plane will lose altitude as the rotors rotate forward.
Hi Ron,
There are many factors that could cause this but check your THR_MAX setting. If it is not 100, make it so.
Other factors are all up weight, CG, set level, transition settings, etc.
Good luck!
i’m actually working off one of your params (param hover 3) posted here and will make updates based on test flights.
I’m worried about the transition because the documentation does not explicitly show if the forward tilt is speed scheduled. I suspect it’s not. Could it be a simple constant rate rotation downward until past a threshold value (cant recall what the parameter name is), and the control law switch from copter to fixed wing as the motor continues to rotate? There is also a transition delay after passing FBW_min, but I’m not sure if it applies to tiltrotor at all. I also suspect there is no VTOL assist, as the doc refers to ‘quad’ motors in the assistance section… By the look of it, there are a couple of ways this can go down south if not lucky.
Ron,
The transition is air speed dependent. This is why the AS sensor is not used until it is properly calibrated. Try to adjust your transition pitch issues on calm days. You can adjust these parameters for a better transition to suit your power system.
Q_TILT_RATE_DN,50
Q_TILT_RATE_UP,200
ARSPD_FBW_MIN,10
Cheers!
Thanks I think they’re already consistent with your param, except fbw min. I haven’t weighed my nimbus but I suspect it’s on the heavy side. My back of the envelope guestimation is a safe minimum speed of at least 50kmh and that’s with wings level. I’ll dial in 13 for now.
What’s your all up weight again, 4.2 kg I recall? Hard to believe that can be pulled off with 10m/s especially considering need for maneuver margin, etc.
Ron,
The 10m/s is never used by me since the throttle stick is always at mid or center. This provides a speed in automatic flight modes similar to manual modes like FBWA. It’s just a trick I learned to keep the plane flying around 15m/s in all modes.
ARSPD_FBW_MAX,20
ARSPD_FBW_MIN,10
HI Greg / All,
Weather has been so unpredictable
I’m hope for some performance indicators - as I haven’t been able to replicate Nimbus well in SITL with my Parameters. My training area will be around 300m x 600m. It would be great if I could expect a comfortable FBWA turn / loiter circle in the 300m space. I realise there are a number of variables. but as an indicator 16-18m/s cruise, bank angle max 35, Mixing Gain 0.5, Throttle Max 80%, Weight 5.2Kg.
Thanks Steve
Hi Steve,
I haven’t done any auto missions with my Nimbus VTOL but it seems that others in this thread have. I can’t remember if you bought yours from Foxtech FPV but they should be able to give you some performance parameters.
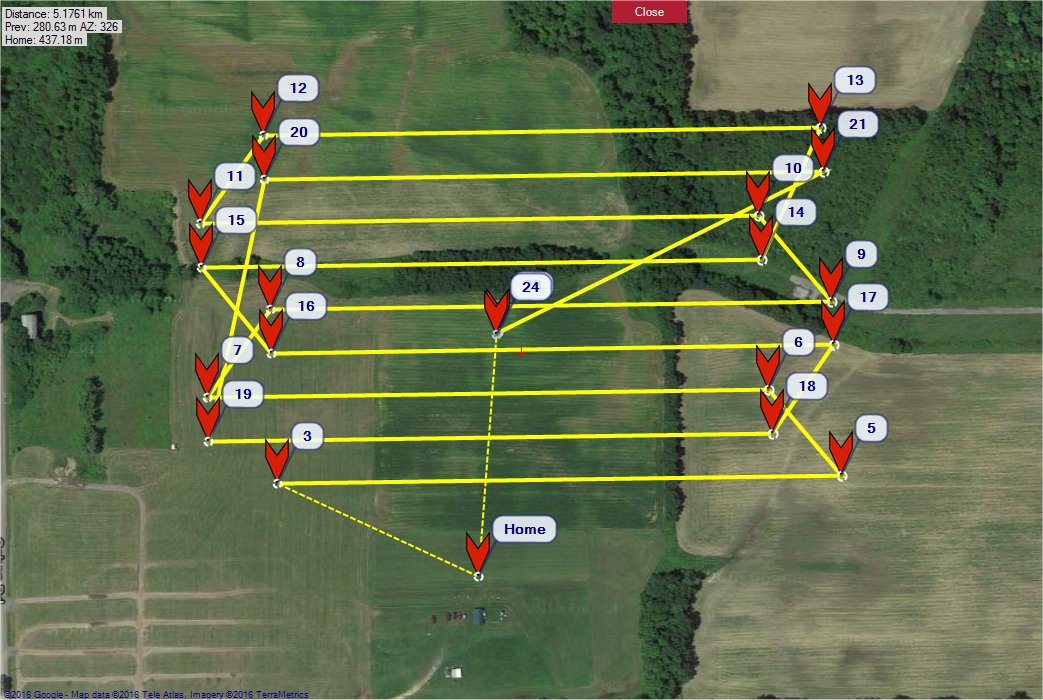
One thing we did years ago on my FireFLY6 VTOL missions was to use the survey tool in mission planner which would skip a row if the plane couldn’t make the turn. My memory is weak in this area but it was likely based on parameters you entered into the survey grid. My assumption is that QGC can do this also.
I like how that mission has been set up, I will play a bit more, I notice after a few wat points the yellow black and red lines diverge to a point where I think the SITL ‘gives up’. Just a few power stats from my hover the other day. Hover Throttle 41% @5.2kg, MAh put back into battery 4574MAh. Look forward to seeing the cruise power.
grey I did a full param comparison.i noticed your greg hover3 param uses a much smaller tilt rate range,
Q_tilt_rate_dn=15, Q_tilt_rate_up=50, rather than the default 50 and 200. Is the slower rate more desirable for transition behavior?
we’re using different motors and servos I think but they shouldn’t be too different in terms of weight and inertia. I’m using X3120 motors and UAVS VTOL kit/servo on 6V power supply. This is probably a lighter weight situation compared with the larger motors people are using here.
It’s a personal preference. I usually set the tilt rates lower (quicker) on my initial transitions. Once I am comfortable with how it performs, I ease up on them for a more graceful transition. My current values are below. I think the Foxtech V2 Nimbus uses 80 for the down rate.
Mine
Q_TILT_RATE_DN,50
Q_TILT_RATE_UP,200
Foxtech V2 Nimbus VTOL
Q_TILT_RATE_DN,80
Q_TILT_RATE_UP,200