Sent PR in. It will be in the last Beta as soon as Michael have some time.
Excellent, thanks a lot
I think I had a mistake in the validation of PSC_ACCZ_P
I’ve resaved the spreadsheet without any validation on that cell, please download a new copy
1 Like
I’ve updated the sheet to include the common battery types and had to change to a later Excel type for my changes to work properly, so there’s a new download link
5 Likes
Hello Everyone!
I am trying to tune a Quadplane with 2m wingspan weighing 8 Kgs spinning 18 inch props following the VTOL tunning instructions which is a direct derivative of the New Tunning Instructions for Copters.
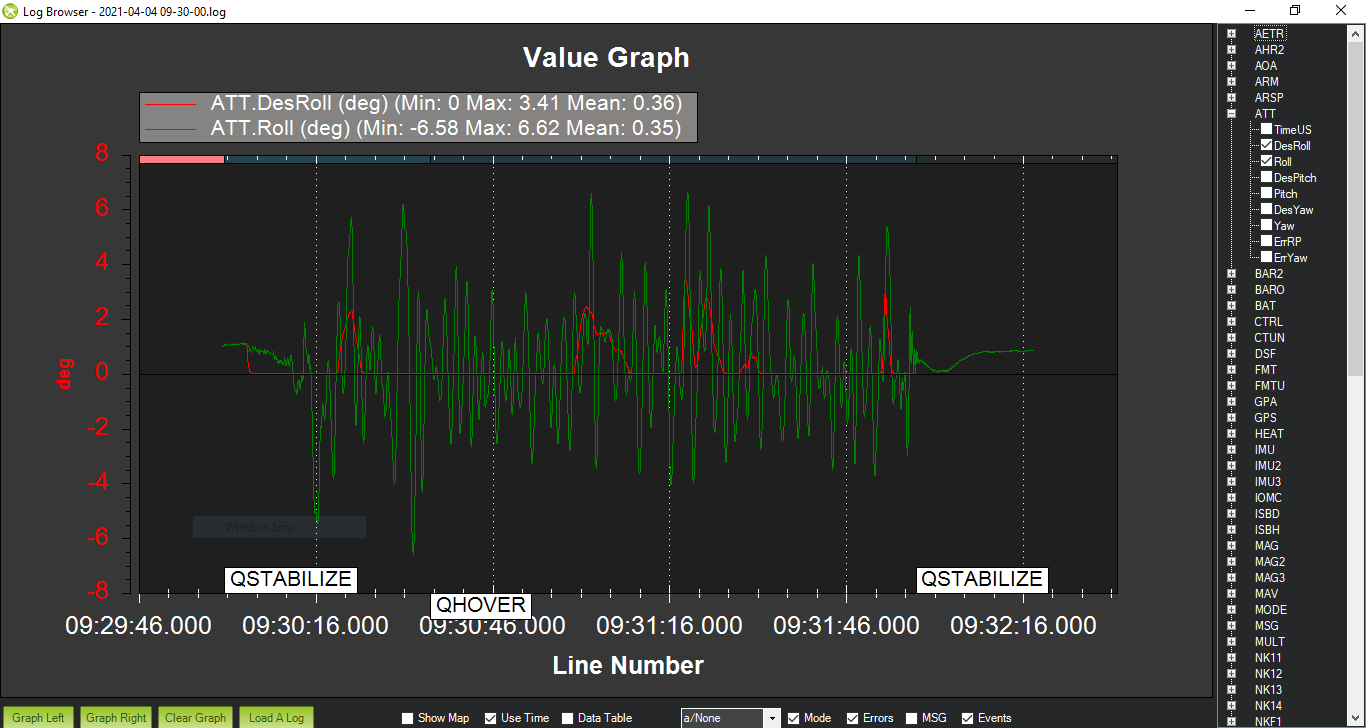
First takeoff in Q_Stabilize was successful but with quite a lot of oscillations. I reduced the Q_A_RAT_XX_P/I/D 50% twice as per the instructions and hit the minimum D gain value at 0.001 for Roll & Pitch, but the oscillations still persist. The P gain values are around 0.1 at the moment for Roll & Pitch. Here are the plots of Desired Pitch/Roll vs actual Pitch/Roll.

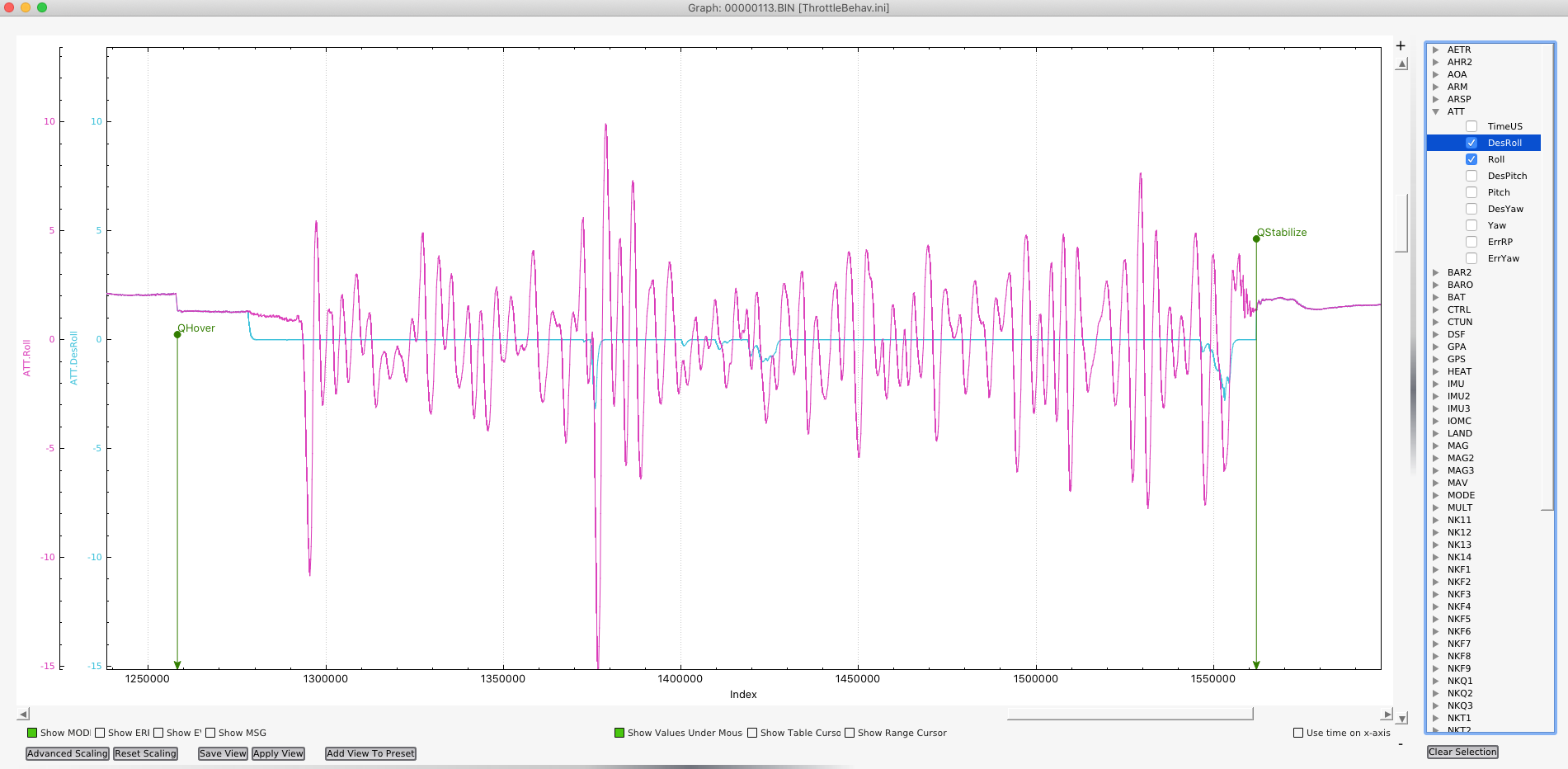
I further tried with Roll & Pitch P values as low as 0.075 without success. How low can i go safely on the D term & corresponding P/I terms further to remove the oscillations. Is this an excess P gain that i am looking here or this is something else? Please guide on what should i attempt to fix this oscillation.
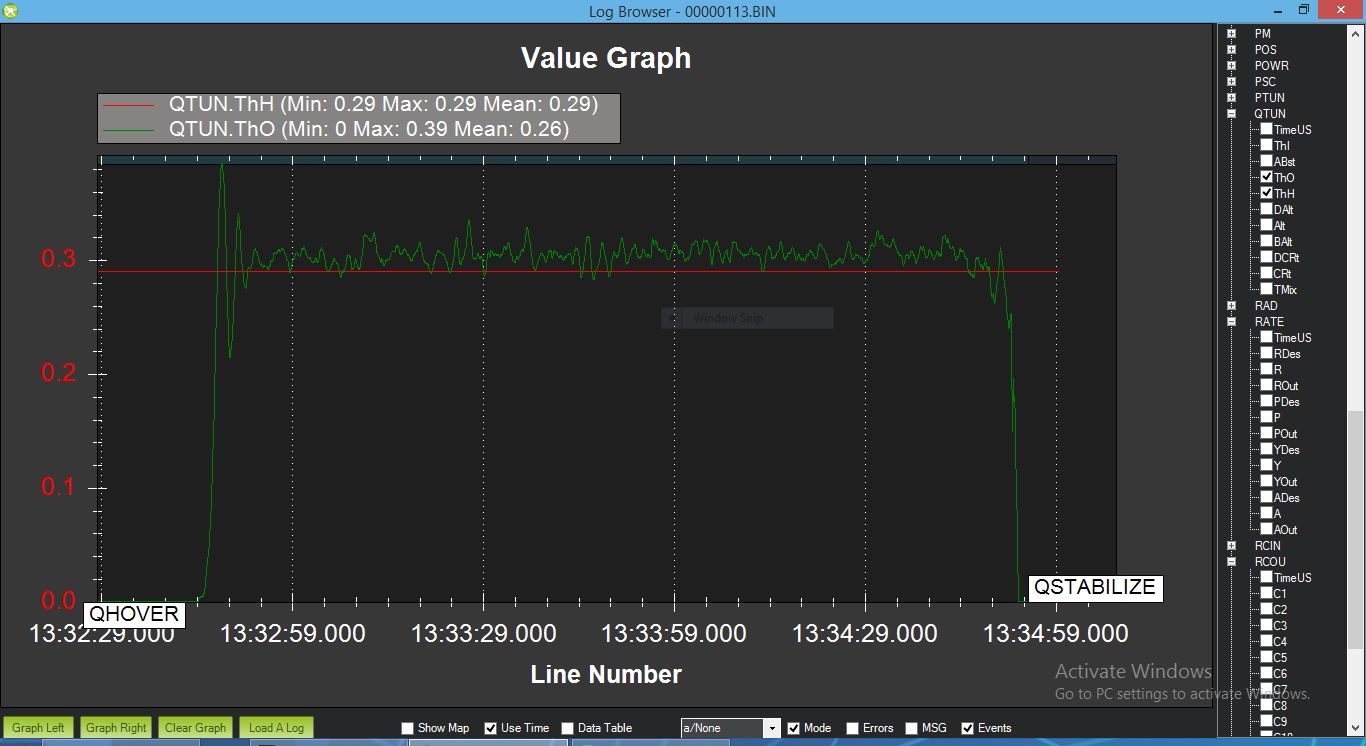
I did a 30s or so hover to learn the Q_M_THST_HOVER parameter and did the subsequent test in Q_Hover flight mode.
Here is the graph of Desired Altitude vs Altitude in Q_Hover mode after setting the Q_P_ACCZ_P/I parameters as recommended.
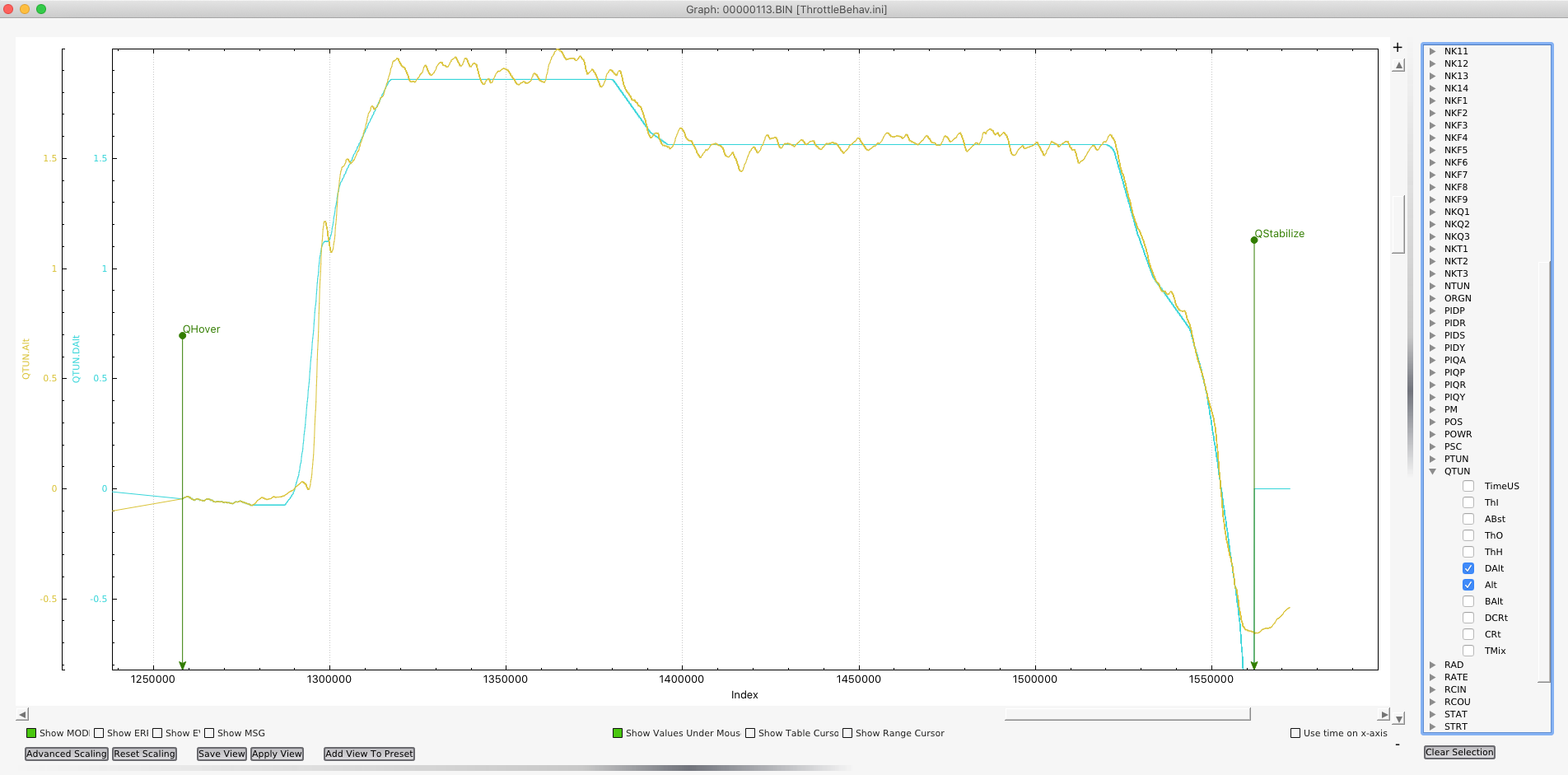
Please comment on the Altitude hold performance if it is satisfactory, and if something can be improved.
Complete flight log is attached https://www.dropbox.com/sh/s6cq5vdsaydy38r/AACojHNTOxnimgGSun4AWAAWa?dl=0.
(Sorry for Three flights in the same log, i forgot to change the parameter to stop logging in current file on disarm).
I initially posted the problem here but looks like this discussion is more suited for my question. Please help in solving the oscillations issue so that i can proceed with the tunning process.
Hello Everyone!
While waiting for the expert views on the oscillations issue, i attempted to setup the Notch Filtering. I Did a stable hover in Q_Hover mode of approx 2 mins with occasional small stick inputs After setting the INS_LOG_BAT_MASK = 1 & INS_LOG_BAT_OPTS = 0.
Here is the FFT graph of the recorded IMU batch data:
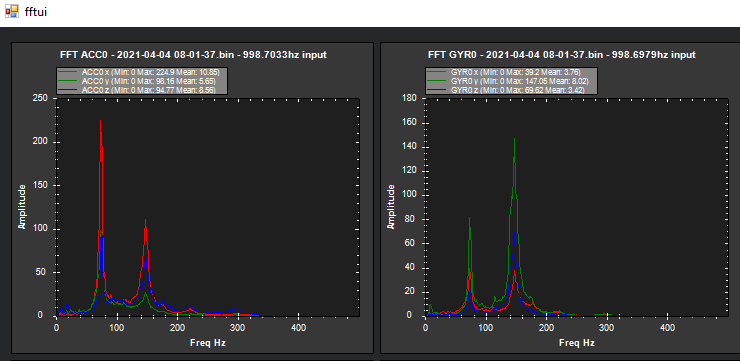
Here is a clear peak at 74 Hz and a second harmonic at 147 Hz. The Harmonic notch is setup using Q_M_THST_HOVER as the Harmonic Notch Reference and i used a bandwidth of 35Hz (approx hover_freq/2) after looking at the noise spread from FFT graph.
Log file of the flight is here: https://www.dropbox.com/s/icfy1le2fj4psyz/2021-04-04%2008-01-37_Before_HNTCH.bin?dl=0
I did the next test after setting the INS_LOG_BAT_OPTS = 1, to check the effectiveness of the Harmonic Notch setup. Here is an FFT graph from this test flight:
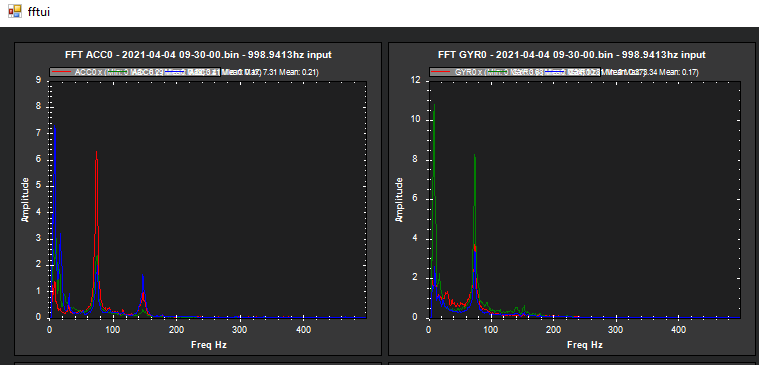
The noise peaks at 74 & 147 Hz are nicely suppressed. However, the Roll/Pitch oscillations still persist as no tunning has been attempted on Roll/Pitch PIDs.
Here is the complete log of Harmonic Notch Test flight: https://www.dropbox.com/s/4dow5lb1k8klxs4/2021-04-04%2009-30-00_After_HNTCH.bin?dl=0
@xfacta @andyp1per @Leonardthall I would appreciate if anyone could please look into the logs and point me to the right direction for dealing with the oscillations and pointing out the probable cause. Also, i would be looking forward to your expert views on the Altitude Hold performance & my Harmonic Notch setup.
Looking forward to a good tune with community help 
I don’t understand quadplane logs and quadplane doesn’t have good autotune like copter so I’m probably completely wrong here but it looks to me like this is standard P oscillation and what you need to do is crank up D to compensate for overshoot. So don’t lower D - raise it.
Try Q_A_RAT_RLL_D somewhere around 0.004 to 0.00625
Probably set RAT_PIT params to be same as RLL for now, until you can get closer to correct.
I think the ACCEL params are too low too, start with these and go from there:
Q_ATC_ACCEL_P_MAX,60300
Q_ATC_ACCEL_R_MAX,60300
Q_ATC_ACCEL_Y_MAX,19800
And these are “typical” but not necessarily correct for you:
Q_A_ANG_PIT_P,6
Q_A_ANG_RLL_P,4.5
Q_A_ANG_YAW_P,3
Make a new post just for your testing and post a new log in there after trying those params
EDIT: I meant to point out Q MOT SPIN MIN is maybe a bit high, getting close to the hover value.
1 Like
Hello @xfacta. Thank you for the quick reply. It is very windy here today and i will test the RAT_RLL_D values in the suggested range early tomorrow morning.
The reason i started-off with Q_ATC_ACCEL_P/R_MAX vales of 15000 is a post from Leonard Hall, where he suggested these values as the starting point here:
The Quadplane is able to hover now, so i can increase the values initially to 30000 & then try 60000 if the response is batter with higher values. I will post the log after these tests here.
The Q_MOT_SPIN_MIN is set at 0.2 (20% PWM). With a throttle range of 1100-1940 this results in RCOut PWM value of 1268, whereas the RCOut PWM values for hover are averaging close to 1600.
The reason why i have set SPIN_MIN to a relatively higher value of 0.2 is to reduce the risk of ESC Sync Loss that resulted in a crash on my previous QuadPlane build.
Thanks again ![]()
Hello @Leonardthall
I was reading through your excellent advice on tunning and managing gyro noise in this thread, and i want to confirm if i understand the below section correctly:
Here by 20% hover throttle, do you mean CTUN.ThO for Copters and/or QTUN.ThO for Quadplanes should be below 20% (0.2) for a good tune which is not noise limited? What about the builds where hover throttle is 0.3 or more due to the lower Thrust to Weight Ratio like the Quadplane below?
I suspect you might be talking about the RATE.XOut (R/P/Y) message when you mention
but it is always better to confirm ![]()
How do I determine the level of NOISE in RATE.XOut graphs? I have attached a graph from my Quadplane log. Can you please explain how to interpret the noise level here.
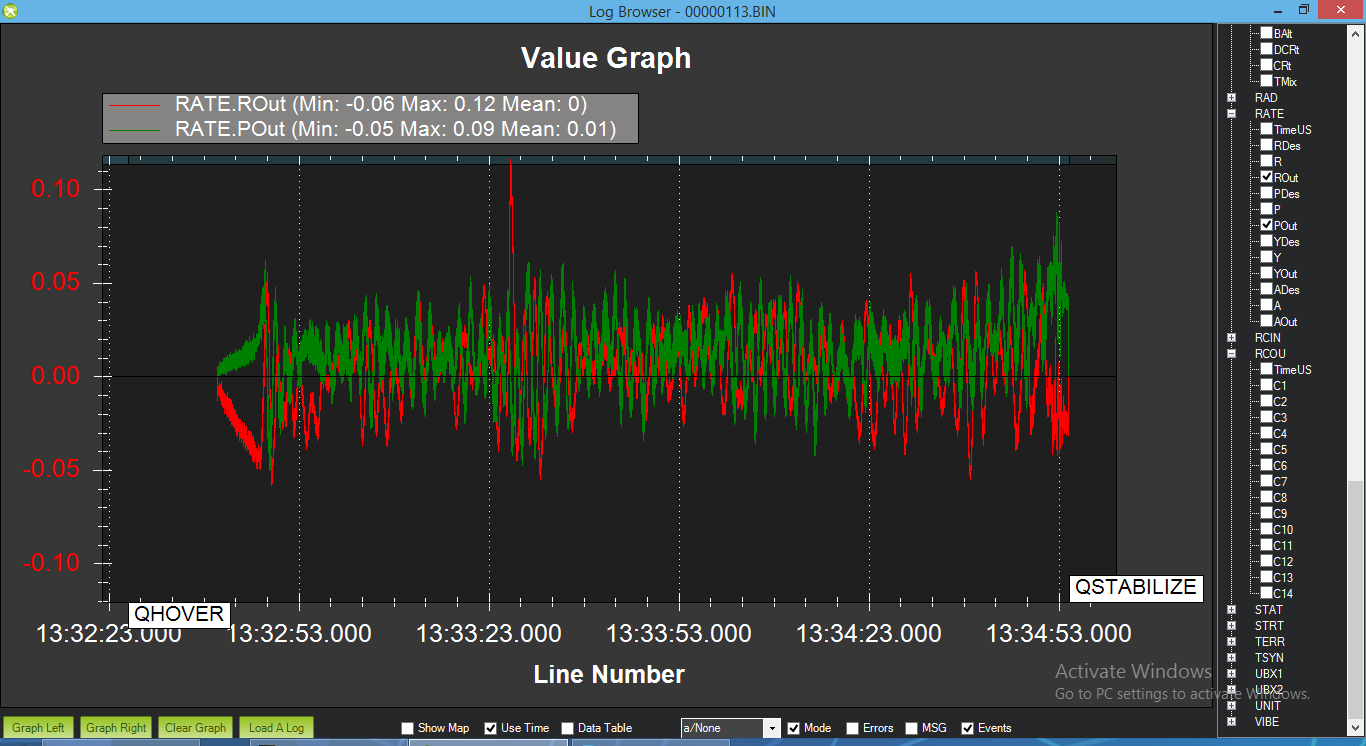
This log is collected with logging set to ATTITUDE_FAST in Q_HOVER. There were oscillations in Roll & Pitch
Many thanks for your valued time in answering these questions. It helps a lot many of us “novices” and we can’t appreciate enough.
Hello Shawn,
I did three test flights in the morning. It wasn’t perfectly calm; wind speed was around 5-8 Km/h.
Test_Flight_1:
Q_A_RAT_RLL_D = 0.006
Q_A_RAT_PIT_D = 0.006
Q_A_RAT_RLL/PIT_P = 0.1 (I gain same as P)
Q_ATC_ACCEL_P_MAX 30000
Q_ATC_ACCEL_R_MAX 30000
Q_ATC_ACCEL_Y_MAX 9000
The aircraft was responding to stick inputs better but there is significant overshoot. I felt more in control but the oscillations still persist. After a couple of mins in Q_HOVER i switched into Q_LOITER. The oscillations started to increase in amplitude and i reverted back to Q_HOVER Instantly.
Test_Flight_2:
Q_A_RAT_RLL_D = 0.006
Q_A_RAT_PIT_D = 0.006
Q_ATC_ACCEL_P_MAX 45000
Q_ATC_ACCEL_R_MAX 45000
Q_ATC_ACCEL_Y_MAX 13500
The aircraft overshoots just like the previous test and i felt less in control with higher ACCEL parameters and the oscillations still persist.
Test_Flight_3:
Q_A_RAT_RLL_D = 0.0065
Q_A_RAT_PIT_D = 0.0065
Q_A_RAT_RLL/PIT_P = 0.08 (I gain same as P)
Q_ATC_ACCEL_P_MAX 30000
Q_ATC_ACCEL_R_MAX 30000
Q_ATC_ACCEL_Y_MAX 9000
For the third test, i decreased the ACCEL parameters. To reduce the overshoot i increased D gain to 0.0065 and slightly reduced P gain to 0.08. The effect was not noticeable.
The flight logs here:
I could not run further tests due to increased wind speed.
I’m trying to autotune my aircraft, its flies fine in all modes but i want to tighten it up as it is sluggish in pitch and yaw. I followed all the steps in the Quaplane VTOL tuning guide ([https://ardupilot.org/plane/docs/quadplane-vtol-tuning.html?highlight=tuning ].Then i did an autotune starting with roll, that went fine and roll is nice and tight now. I went to pitch next and it did not go well, after two twitches it seems to have lost power and fell to the ground, even with me inputting full throttle. No damage, the next day i tried yaw just to see if it was only the pitch axis with the issue. The same happened, after 2-3 twitches it started to descend and could not catch itself, even with full throttle. Only way to stop the descent is to switch to Q_Stabilized and go to full power.
Its not a battery issue as it flies fine, hovers at approx 50% and i used the same battery for the roll axis tuning. Any help would be great, thanks. Link to log below.
[https://drive.google.com/drive/folders/1xUt7-8P6xWJUXZduTMYy_t89jNilBvUa?usp=sharing ]
We need to start new discussions for these so we don’t clutter the Tuning Instructions Wiki discussion
I’ve updated my spreadsheet for the new name ATC_ANG_YAW_P in 4.3+ versions of Arducopter
It was ACRO_YAW_P in 4.2 and below, but still does exactly the same function.
I’ve added in some Harmonic Notch Filter suggestions, with the frequency based very roughly on prop size. The INS_HNTCH_REF is also an estimation in this case, without knowing your exact hover frequency and minimum frequency.
Feel free to offer suggestions of your own or point out errors
2 Likes
Yes in a way - the formulas are used.
The spreadsheet was converted to a plugin you could run in MissionPlanner, then became the Initial Parameters section you see now.
1 Like
Do I recall that @Eosbandi generated the plug-in from your data Shawn? Good time to rev it with your updates!
1 Like
Yes, I was going to ping @Eosbandi to update the Initial Params section with the new ATC_ANG_YAW_P name for 4.3+ and also the new INS_ACCEL_FILTER value.
I’m not sure about my HNOTCH suggestions yet, probably leave them out unless people think it’d be a good idea to have them in Initial Params.
1 Like
I’m quite busy, but put on the list to update the initial parama calc. (right before killing the dragon)
1 Like
Thanks Andras - take your time
The two changes are not critical.