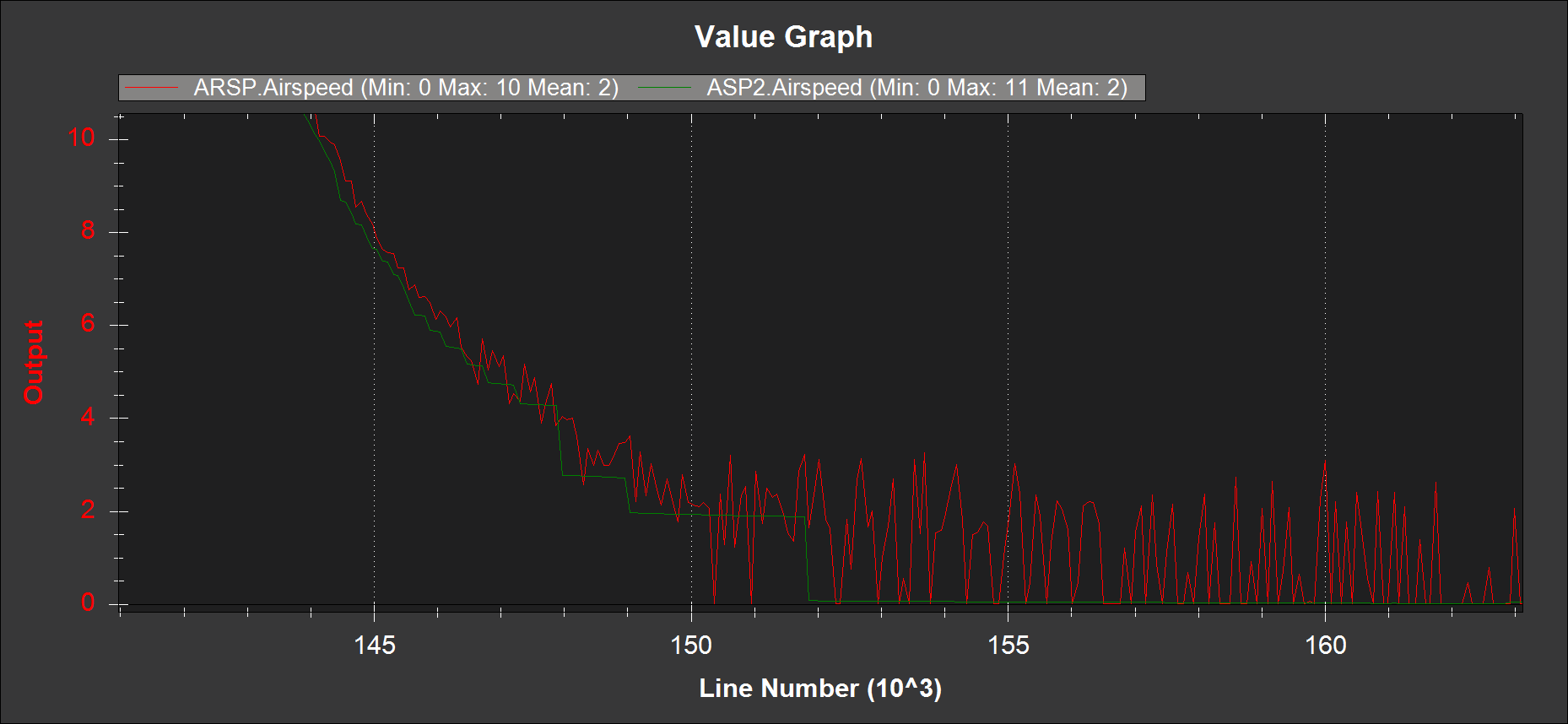
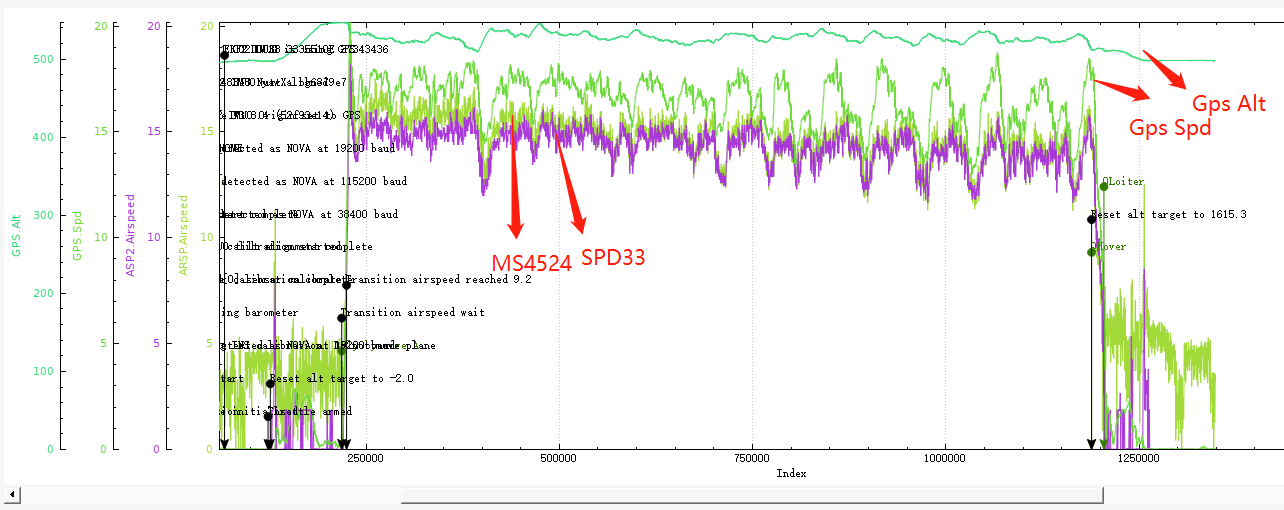
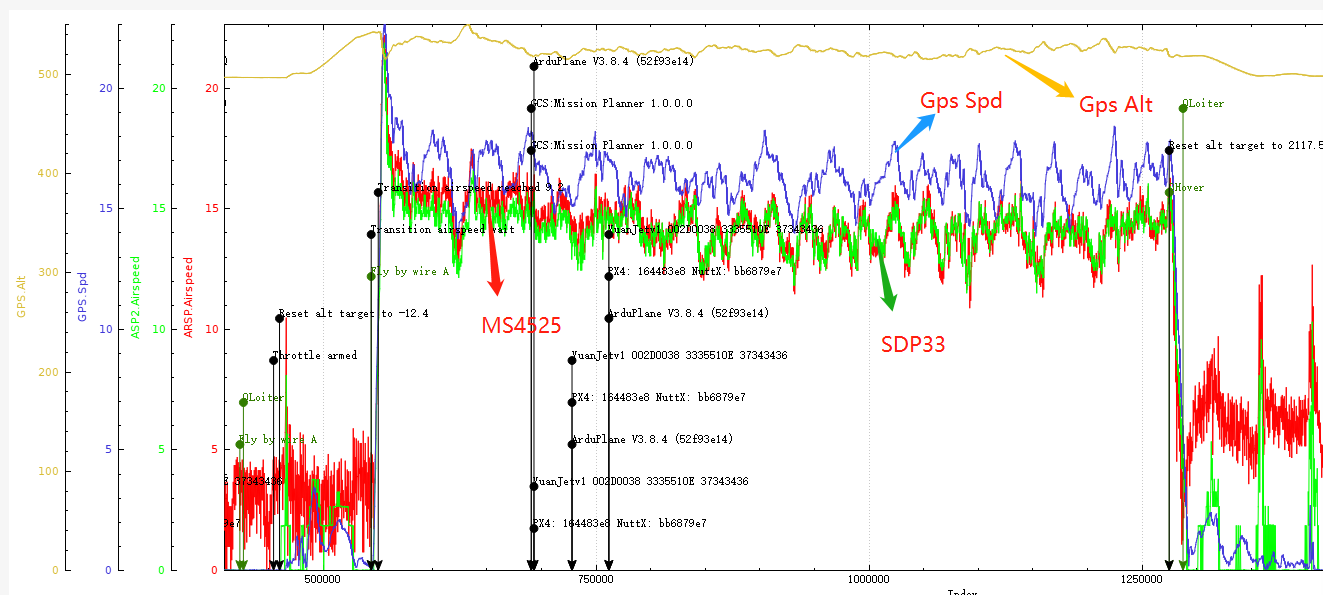
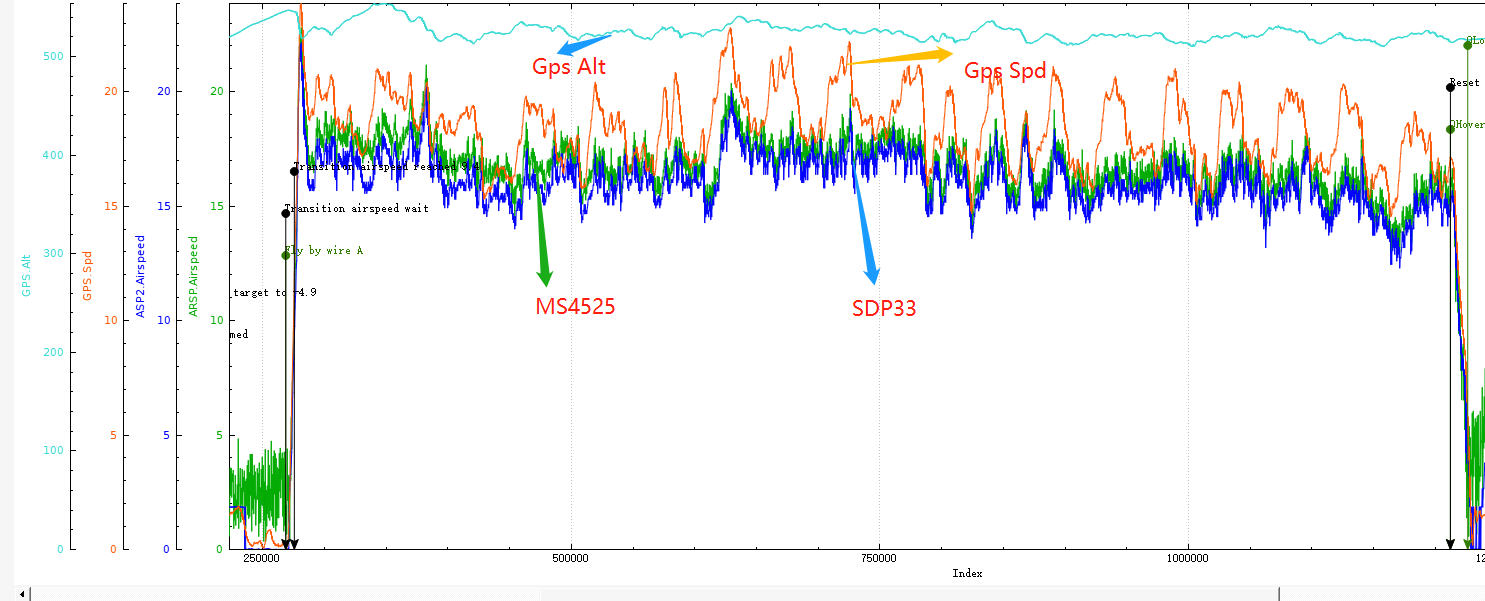
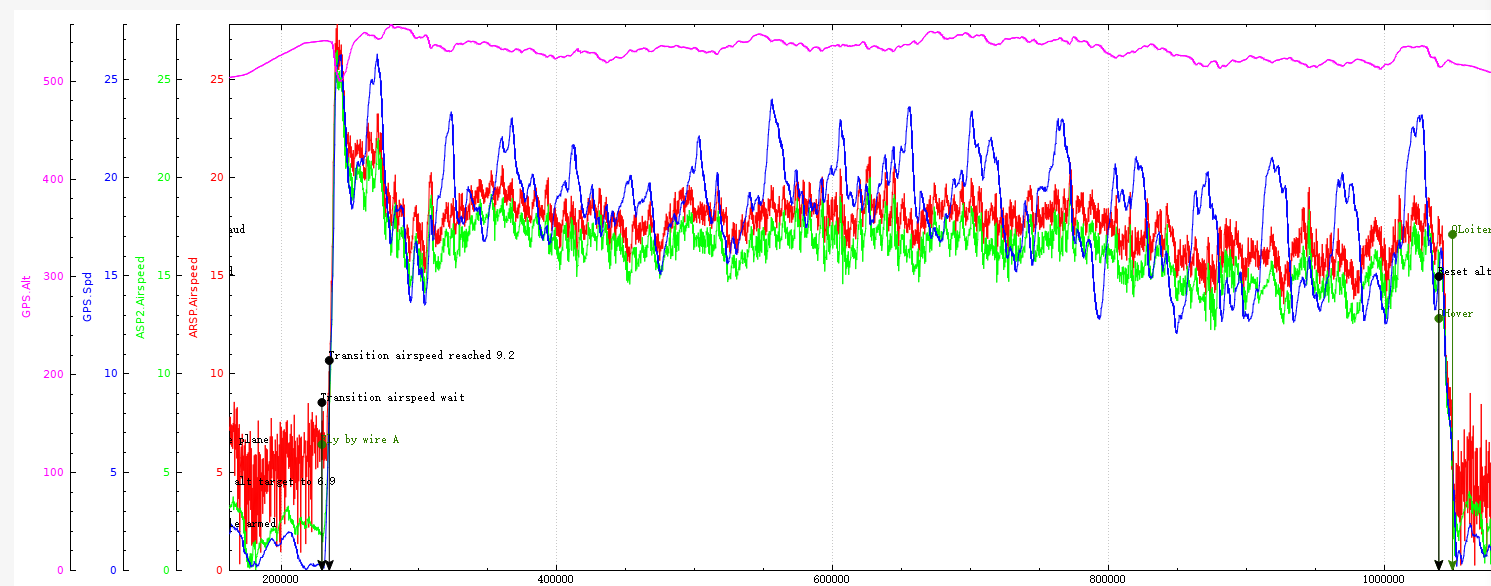
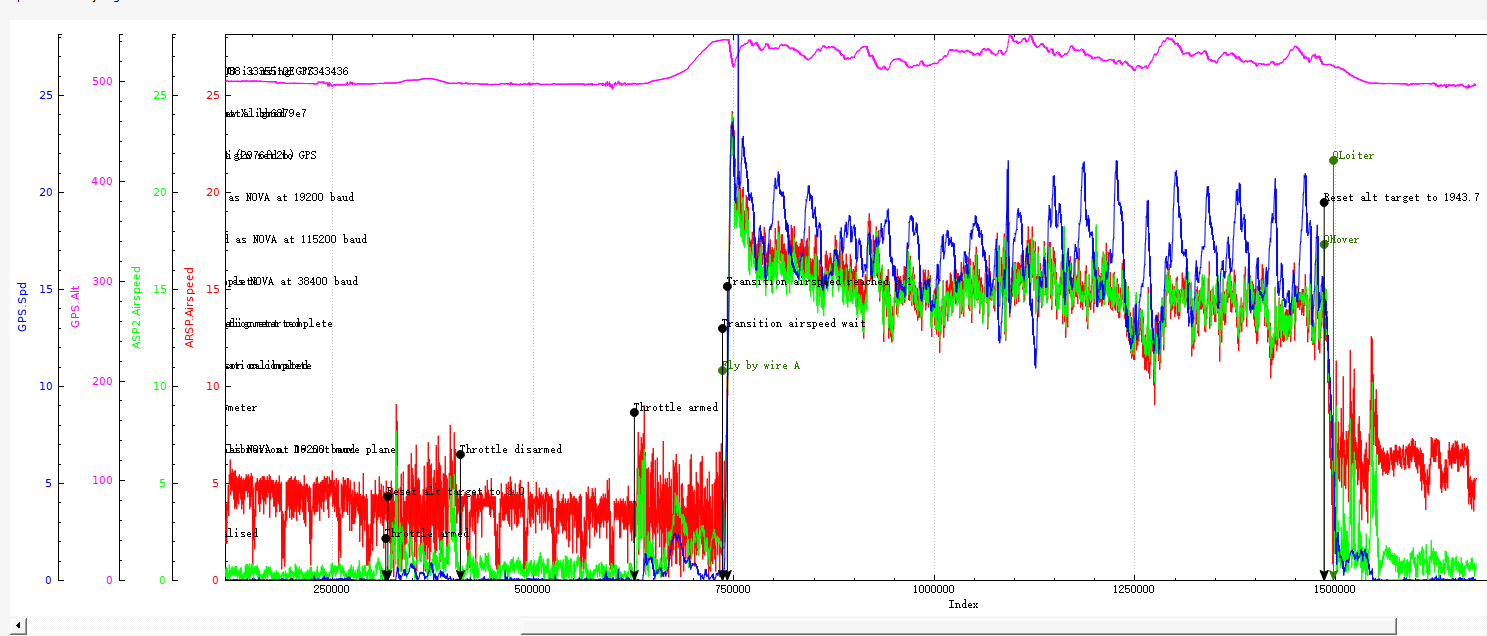
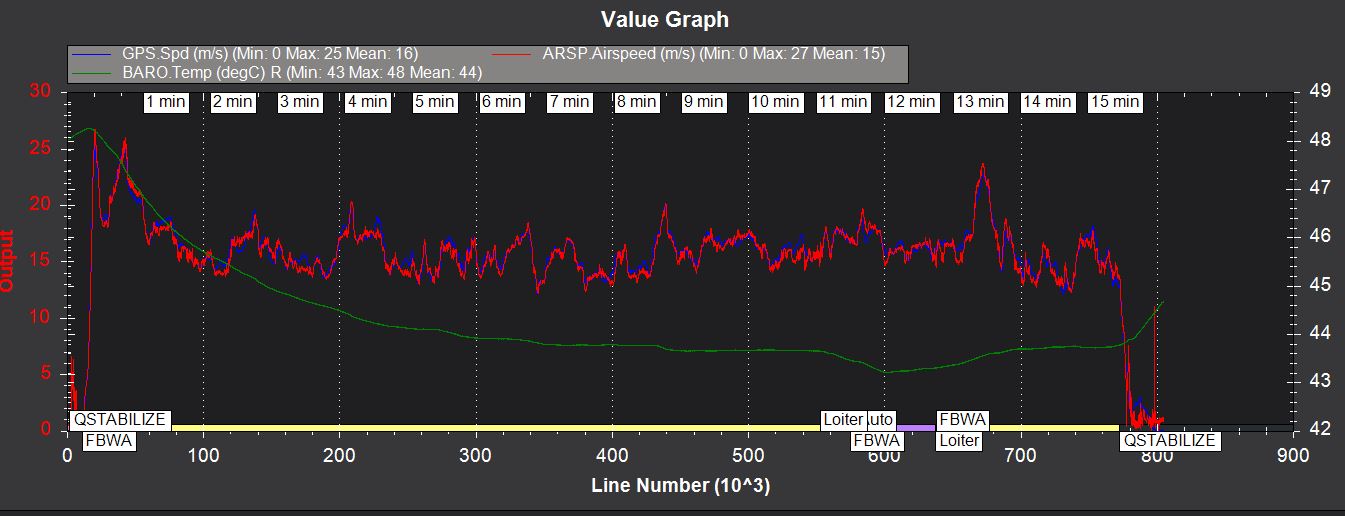
Q: Why the steps of the green line in the last picture? Is this because of reduction of resolution for logging or does the sensor not output higher resolution?
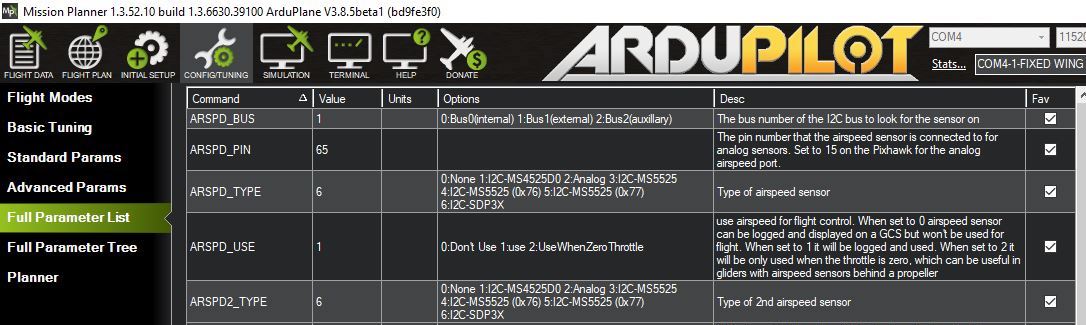
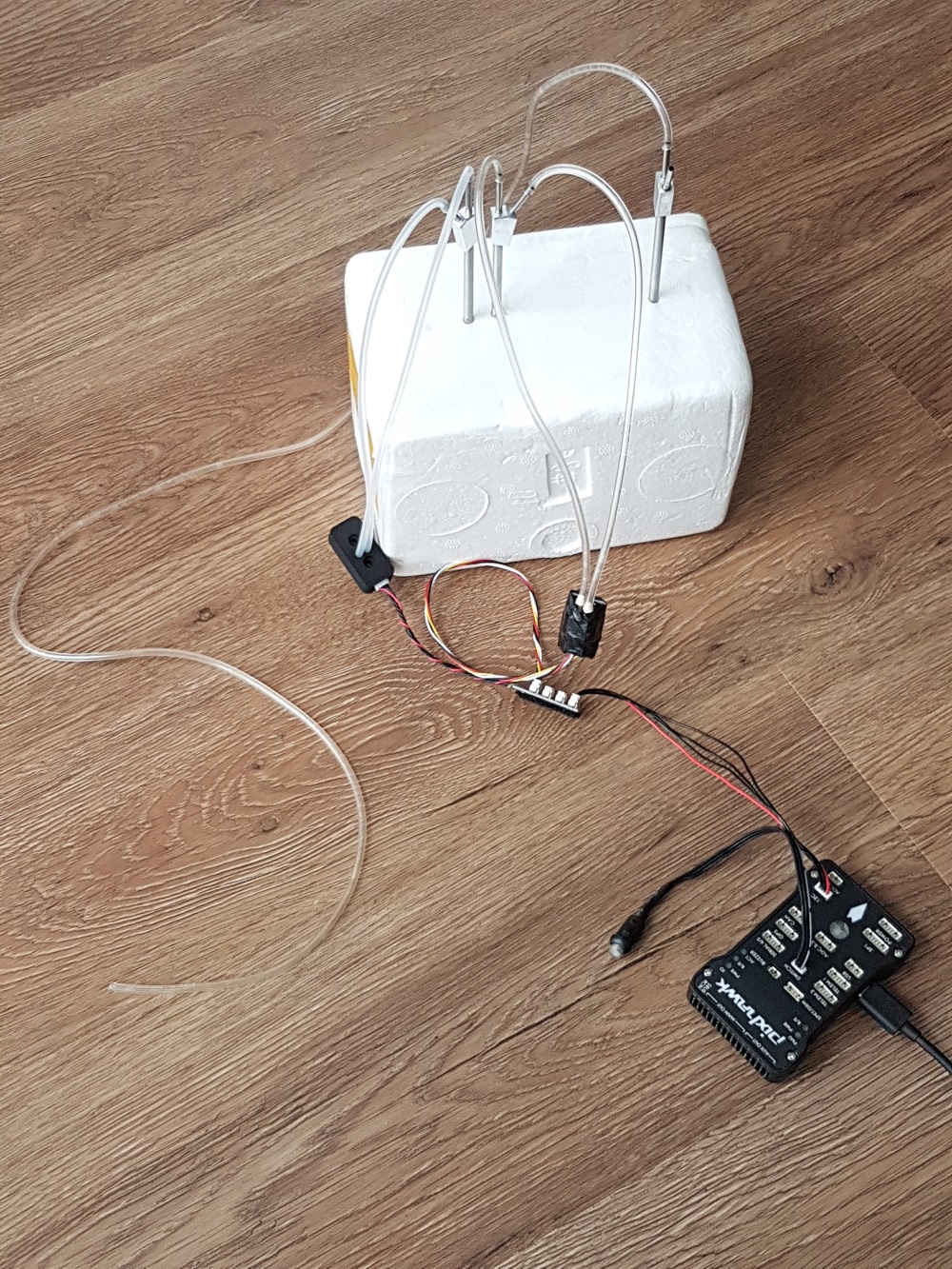
I’ve got the latest one of these. Electronically it works, but the following pointers might help others. The 4 wires away from the sensor on mine are separated, with pin 1 marked with a grey strip. the wiring is this way: +3.3v, s london, sda, grd, with the 3.3v (or 5v, both work) on pin 1. As the sensor is sealed in, you cannot easily refer to the pcb. the i2c must be set to 100khz to run correctly, and the implementation does not ack reads so breaking some i2c scanners. (it appears on address 0x21 on mine. writing 0x21, 0x36, 0x7c (version request command) however gets acked. the ardupilot driver (when set to correct parameter, i believe 6) should then pick it up automatically and output a message during bootup.
Hopefully this should assist anyone trouble shooting this sensor, I nearly sent it back as it appeared not to work.
liang-tang has found what looks to be a floating point precision problem (which will only really manifest itself at low speeds), and I’ve encountered what looks to be missing correction factors for a variety of atmospheric conditions (primarily pressure drop in the hose, which is being badly aggravated by a fairly high density altitude)
EDIT: For now until we’ve chased these things down I’d consider the driver experimental and recommend using caution for now. (I encountered conditions where the sensor was off by 50% for me, so that needs to be resolved before I can endorse it).
The thing with this sensor is that its not really a differential pressure sensor, because this sensor needs an airflow through it to be able to measure.
Basically the sensor measures the airflow trough it via the cooling of an heating element by the airflow. This is kind of the same as with an hot wire anemometer.
The integrated calibration is implemented so that the flow can be
correctly measured over the entire temperature range. Consequently, no further temperature compensation is required for the conversion of the differential pressure output signal to mass or volume flow.
Do we still compensate this sensor for altitude and temperature?
The main advantage of the special measuring method of this sensor is the high sensitivity, reliability and validity at low airspeeds (less than 10-12 m/s). For our tiltrotor VTOL “Mozart” with stallspeed at about 9 m/s, the measurement accuracy in this area together with the unnecessary offset calibration is a huge advantage. This of course says nothing about advantages or disadvantages of the SDP33 at higher speeds, where the usual pressure difference sensors can exploit their advantages.
Thanks for the link. Didn’t know that. Might be a real problem.
Is it at all possible to correct the measurement over the whole speeds and altitudes we fly at?
Maybe we can do the Airspeed calibration at two different speeds so we get the exponent of the correction function?
This is really complicated…
As I have this speed sensor here I wonder if there is some progress on the issues ? As I am not experienced I will follow the recommendation not to use it untill it is safe.
Although I haven’t tested this in temperature/density altitude extremes, this sensor has done very well for me. I’ve flown it over 20 hours in calm to 15m/s wind gusts and it has worked very well for me. I can’t speak to its accuracy, but the safety bonus of not having to pre-flight calibrate is a HUGE bonus.