i connected the TF luna to FTDI. Is there any way to know which FW is installed? I’m afraid of the brick!  Thanks
Thanks
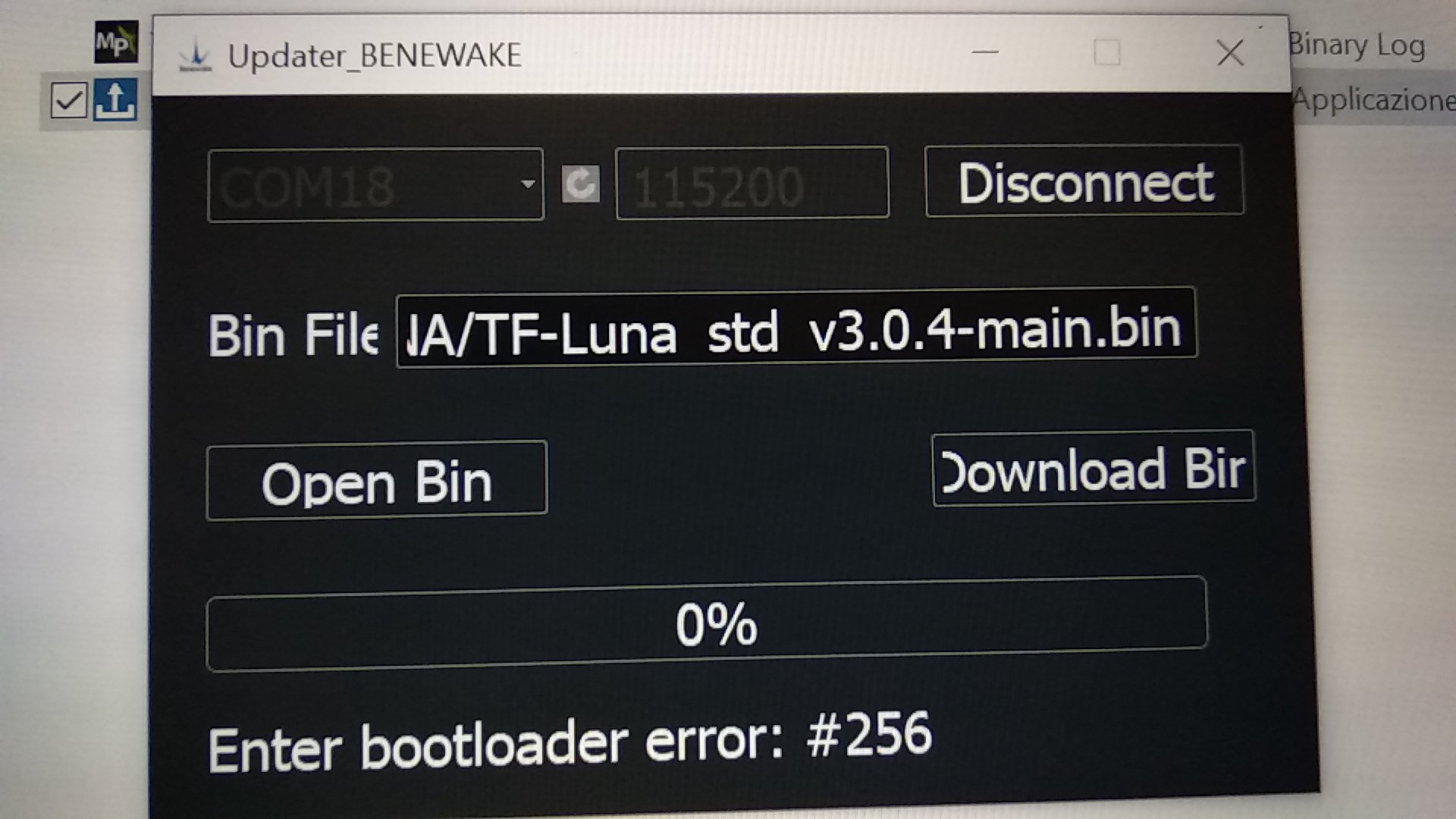
I tried to update firmware but I have this error:
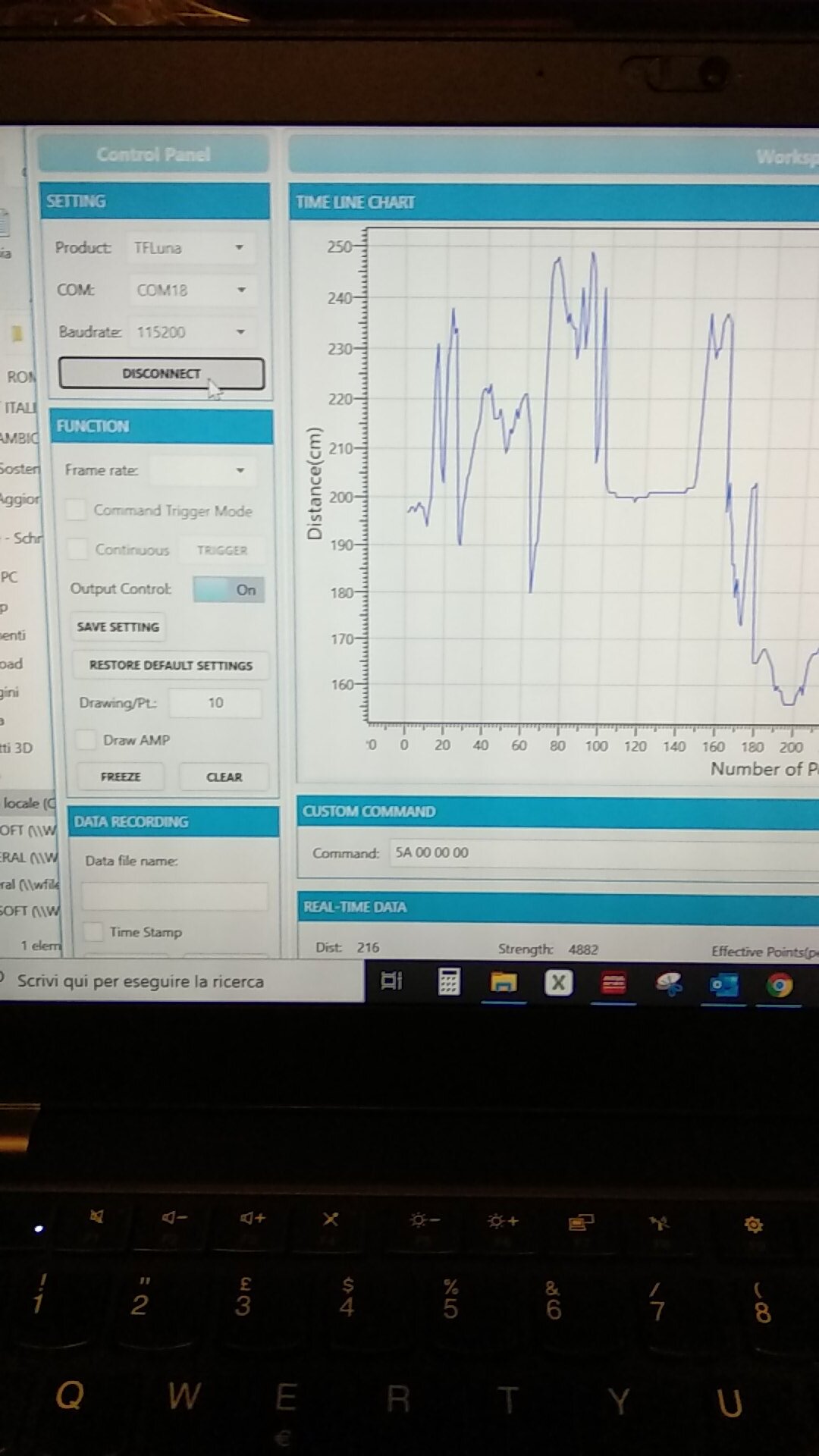
But works well
i connected the TF luna to FTDI. Is there any way to know which FW is installed? I’m afraid of the brick! Thanks
I tried to update firmware but I have this error:
But works well
TF-Luna: http://en.benewake.com/product/detail/5e1c1fd04d839408076b6255.html
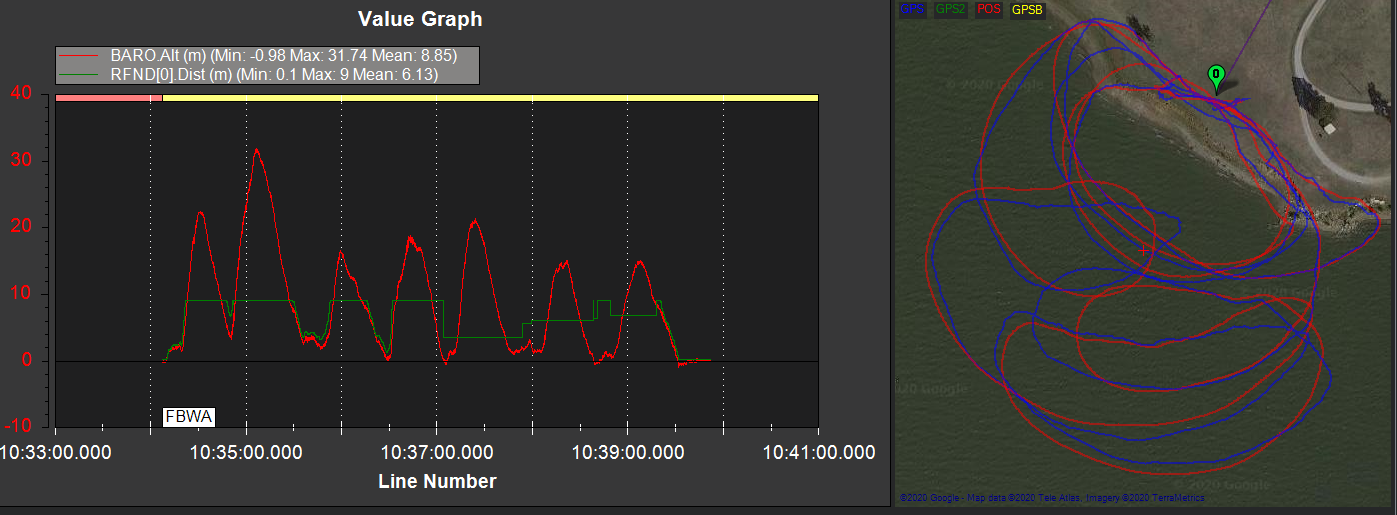
I’ve also flown some tests over water. Predictably, the results are marginal. LiDAR cannot deal with water.
The first three approaches over land as a baseline. LiDAR readings look good there. The next three approaches are over water, and the data are less usable. Final approach is over land, naturally.
Is there any way to know which FW is installed? With fw files in this thread I have error like above picture. Thanks [
@Siya
@ibrahimqazi
For every LiDAR there is a command for check firmware version, the command is mentioned in the manual. Or may be you share your LiDAR serial number I will check in the record.
Thanks a lot Ibrahim, I tried to discover fw version with the GUI send command, but nothing happens. My serial number is in this picture. I tried also to update the fw but I get bootloader error (see pictures above this thread).
@ibrahimqazi
Hi Ari,
Thanks for the response. I really appreciate your ongoing flight tests. It’s always good to understand the possibilities and the limitations in particular of the sensors.
Can you give a note about the light conditions (e.g. cloudy, sunny, dusk etc.) of the test flights?
Why I am asking?
Experimenting with other “time of flight” type LIDAR sensors (like VL53L0X and VL53L1X) I found some of them loose a lot of their usable range in bright outdoor light conditions.
The first set of flights are in sunny conditions. Over-water flight is overcast.
I started out with VL531X. It works extremely well indoors, but provides little usable information outdoors in daylight. With the current setup I’m getting very usable results, as long as I’m over solid ground.
Try update your firmware…for tf luna and tf mini s of im using can bus protocol…
I tried also to update (serial communication) the fw but I get bootloader error (see pictures above this thread). Thanks
ok… i will do some test with my tf luna., do you mind tell me how you set it,… i need replicate your settings
Thanks Dave, my settings are simply. Pixhawk 1 arducopter 4.0.5, connect i2c vcc SDA scl gnd pin 5 to gnd, but lidar not detect. Same configuration but serial communication vcc TX RX gnd, works well and value sonar range in mission planner is correct.
TF luna works also with benewake GUI in serial.
TF luna whit unknown fw version and updated with benewake tools for upgrade fw not work (bootloader error 256)
Hello Alberto,
You will not able to observe the response of command because the GUI has no feedback window.
You need to use Serial Port Utility. I attach the latest firmware for you 3.0.9. Please download it from the following link:
If you are unable to upgrade the firmware. Try the following method:
1- Connect the converter to PC and open the upgrade tool.
2-Choose the serial port number and click ‘CONNECT’. Then open the bin file
3- Connect the LiDAR to the converter. Note: connect only the GND, RX and TX and leave the VCC unconnected at this stage
4- Click ‘DOWNLOAD’ on the panel of the upgrade tool and connect the VCC of the LiDAR to the converter within 10s.
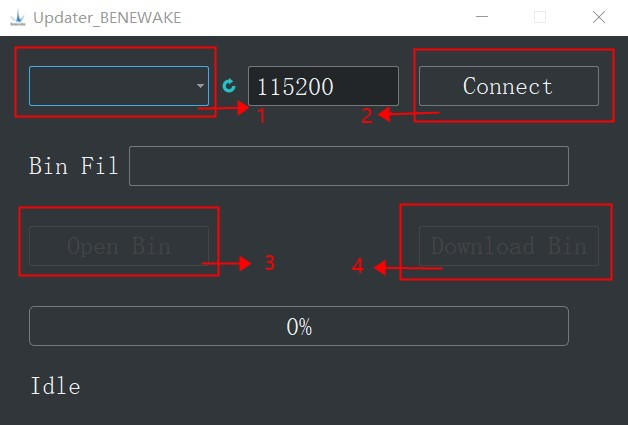
When it is done, please don’t forget to power off the LiDAR after upgrading firmware.
Well done Ibrahim!!! New FW works well in I2C! Upgrade firmware with connect Vcc on the fly!
Many many thanks!
Happy to hear that. Good luck, and I will be waiting for you to share the flight videos with me.
Take care using all the rangefinder on direct sunlight coz too much light will saturate the reading of the sensors.
Hi all,
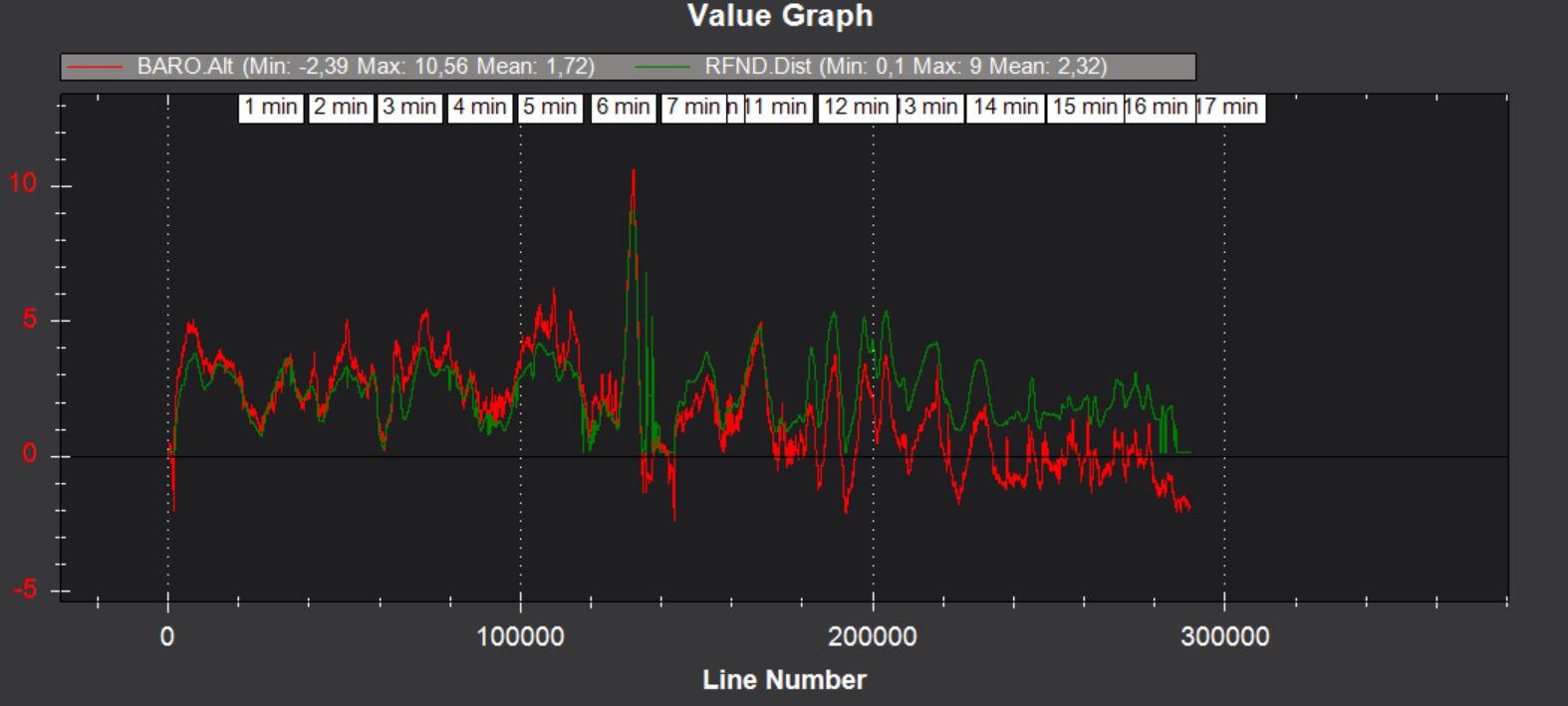
unfortunately it didn’t perform any better than the VL53L1x. In low light it works well, in direct sunlight the behavior was not good, making the quad unstable and I also had to land in an emergency because I didn’t have good control. On the Yappu telemetry the reading seemed correct. Also, I have mounted TF luna on a piece of copper PCB but the GPS doesn’t work well (didn’t see any satellite in over 10 minutes of flight).
I also used the auxiliary function to switch off the lidar, but it doesn’t seem to work.
CH13 OPT 10
https://ardupilot.org/copter/docs/common-auxiliary-functions.html
I attach the flight log if anyone has any suggestions, thanks
https://drive.google.com/file/d/1WTaUe8nHfsY8835HbvFl-bqd7JW1axjd/view?usp=sharing
Good day, as suggested never use a rangefinder in direct sunlight coz sensor can saturate.
Usually better power all extra peri periph with an ubec.
About gps module, try shield it with an EMI tape coz if you attach it directly to the frame it can suffer metal interferences due the frame
It looks to me like the module is working pretty well. It clearly tracks baro altitude. When a module saturates, it reports nonsensical values, typically 0 or max altitude. You see a lot of flat lines when that happens. Your screenshot looks fine as far as the rangefinder goes.
When the rangefinder disable function is activated it will still read distance it just won’t be used for elevation. The data is still available for Flow and perhaps Landing but not sure about that.