Under flight modes in Ardupilot it states avoid ACRO for Quadplanes.
Does that mean I shouldn’t use ACRO mode for a Manta?
Under flight modes in Ardupilot it states avoid ACRO for Quadplanes.
Does that mean I shouldn’t use ACRO mode for a Manta?
Acro flies fine, except you don’t want to transition into acro mode. You need to transition into FBWA or one of the stabilize modes first, or else the plane will stall and tumble into the ground. Once you are in forward flight then you can switch into acro.
Thanks for the clarification. I sort thought that was what you had to do. Sounds like one needs to be careful when switching to Acro. Think I will avoid Acro for a while.
I found out why the current measurement in Manta is inaccurate. There is too little capacity at the input of the three ESCs. I connected another 160uF behind the shunt (16x 10uF/50V ceramics, the ripple current is too high for the typical ESR of the electrolyte - it heats up extremely). Now I was able to reset the BATT_AMP_PERVLT back to 66.7 and the current measurement is now fine.
Hi gentlemen ive just built a Fima Manta and it takes off ok and pids not to bad smothish but it wants to continuously rotate I can change the rotation with the yaw stick is the cure more P gain many thanks in advance
Hello,
I have a FIMI MANTA plane (PNP With flight controller). How do I set ArduPilot to the motors will start idling in QSTABILIZE mode? According to the quote from the manual. „Unlock: Lower the throttle joystick to the end and push the direction joystick to
the end of right side, wait for 2s, the motors will start idling, it means the aircraft
is unlocked. Push the direction joystick to the end of left side and wait for 2s,
the motors will stop rotating, it means the aircraft is locked.“ The motors will not start idling. When I try the motor test in ArduPilot, it says parameter mot_spin_arm missing. Throttle works when I move the throttle joystick, no idle. Do you have any idea? Would uploading new firmware and parameters help? Thanks for your willingness and help
My arming parameters are as follows:
ARMING_ACCTHRESH,0.75
ARMING_CHECK,1
ARMING_MIS_ITEMS,0
ARMING_OPTIONS,0
ARMING_REQUIRE,1
ARMING_RUDDER,1
Arming is done, when the rudder joystick is moved to right for cca 2s. Disarming I am doing by CH5 (RC5_OPTION, 153). You can do it by moving the joystick to left, by setting ARMING_RUDDER, 2.
When armed, motors start idling at throttle joystick in low position. If you are at home without GPS signal, you need to set ARMING_CHECK, 0.
Cool. A few more things.
It is normal? Shouldn’t it be the other way around?
Hello, I have a FIMI MANTA plane (PNP With flight controller). Does anyone have the factory firmware and parameters available to you? I can’t find them anywhere. Could you send them to me via some repository. via google drive etc? Thanks a lot
If you had FW 4.4.0, the original parameters were these:
Params F405_Manta_4.4.0 beta 5_orig.param (25.1 KB)
Does anyone know what voltage is put out on the power for the analog vtx? I’m trying to get a RushFPV Solo to work and it needs 7v to 36v. I’m getting not led lights on the RushFPV Solo so I wondering if the Fimi Manta is only putting out 5v?
Thanks in advance
John
[quote=“dasjlm, post:174, topic:104248”]
Does anyone know what voltage is put out on the power for the analog vtx? I’m trying to get a RushFPV Solo to work and it needs 7v to 36v. I’m getting not led lights on the RushFPV Solo so I wondering if the Fimi Manta is only putting out 5v?
[/qu
The power supply voltage of the high-definition image transmission interface and analog image transmission interface is the voltage of the battery.
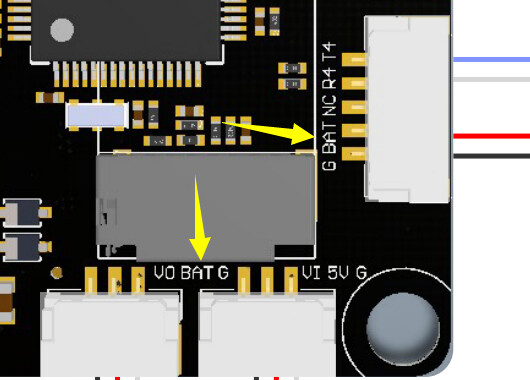
Thanks. I just wanted to be sure.
Hi
do you have a configuration for F405 SpeedyBee Wing ?
Hi dasjlm, I was just wondering if you ever got your Manta working with Flysky i6X and iA10B receiver. Following you blogs it would appear you changed to a Boxer?
I have failed so far with this set up, although It did work fine on an earlier model with an F405 Wing and INav.
Any help appreciated.
Sorry Damien, I haven’t the Speedy Bee wing was in a regular airplane but the receiver worked fine with that FC.
Could you post this file again. I think I have managed to connect my receiver to the flight controller but in the process have lost the original settings now elements are all over the place https://drive.google.com/drive/folders/1szWQ55Go8ucqXHmjVGpyofnstB4xw6QH?fbclid=IwAR006W7Q90knRounTollwQkavniiRzcyVZel5643XHYAUMI14SWUHkqz4LE
I did upgrade to a Boxer and ELRS. Worked right away. Not sure what issue was with FlySky and Fimi said they didn’t have any test equip so couldn’t help.
Any one know what servos come with the Fimi Manta. I have one that is gone, just not sure what to order as there is no label on the servo. A few of my Emax metal servos have a smaller top gear. Just not sure if I can get a standard servo with the larger gear to fit. Suspect larger gear is needed for higher torque? Any one replaced a servo yet? Any comments?
Hi John, thanks for your reply.
Not being in the first flush of youth, shall we say, I’m having to work hard with this technology. I look at it as my equivalent to doing the Times crossword every day ![]()
Ironically, in the mean time I did get my receiver talking to the flight controller.
Transmitter set to PWM and SBUS, using the supplied lead in the regular receiver socket (not the soldered tags) wired to a servo plug plugged into the IBUS socket on the receiver.
Now my problem is that having fiddled massively with the firmware etc. I’m completely lost. Some controls move but not the right ones🙁
Left and right rudder for instance move the right motor, aileron stick moves one elevon and causes the other motor to “twitch”.
My next task is to try and get a new file for the original parameters. Unfortunately I omitted to save a copy originally.
Wish me luck🤞