I thought there might have been a standard of some kind by now for rc fpv analog wiring, but it’s good to know I should always go with the camera and flight controller pin assignments.
Thanks for taking the time to reply as I feel better knowing the wire colors should be ignored.
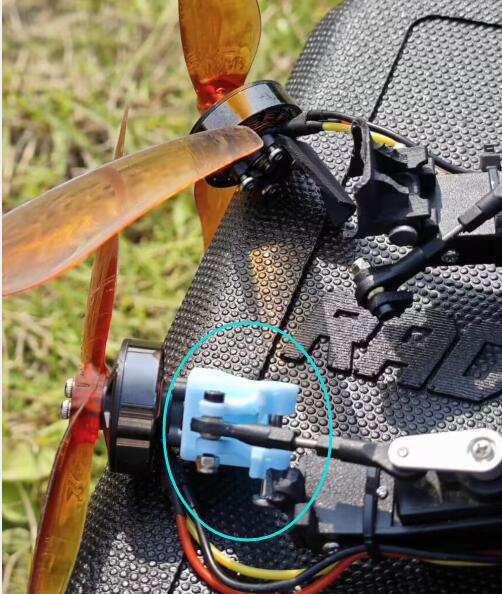
After some thought, I came to the conclusion that the concept of the Manta is flawed. The same story as with the real-world aircraft Osprey V-22: more hype than real-world functionality. My Manta was flying fine in the VTOL mode, but the first attempt of the transition ended in a disaster. It started oscillations, crashed and one of the motor hinges was broken. I never experienced this with my VTOL flying wings, where in case of any problems I could always revert to the vertical mode.
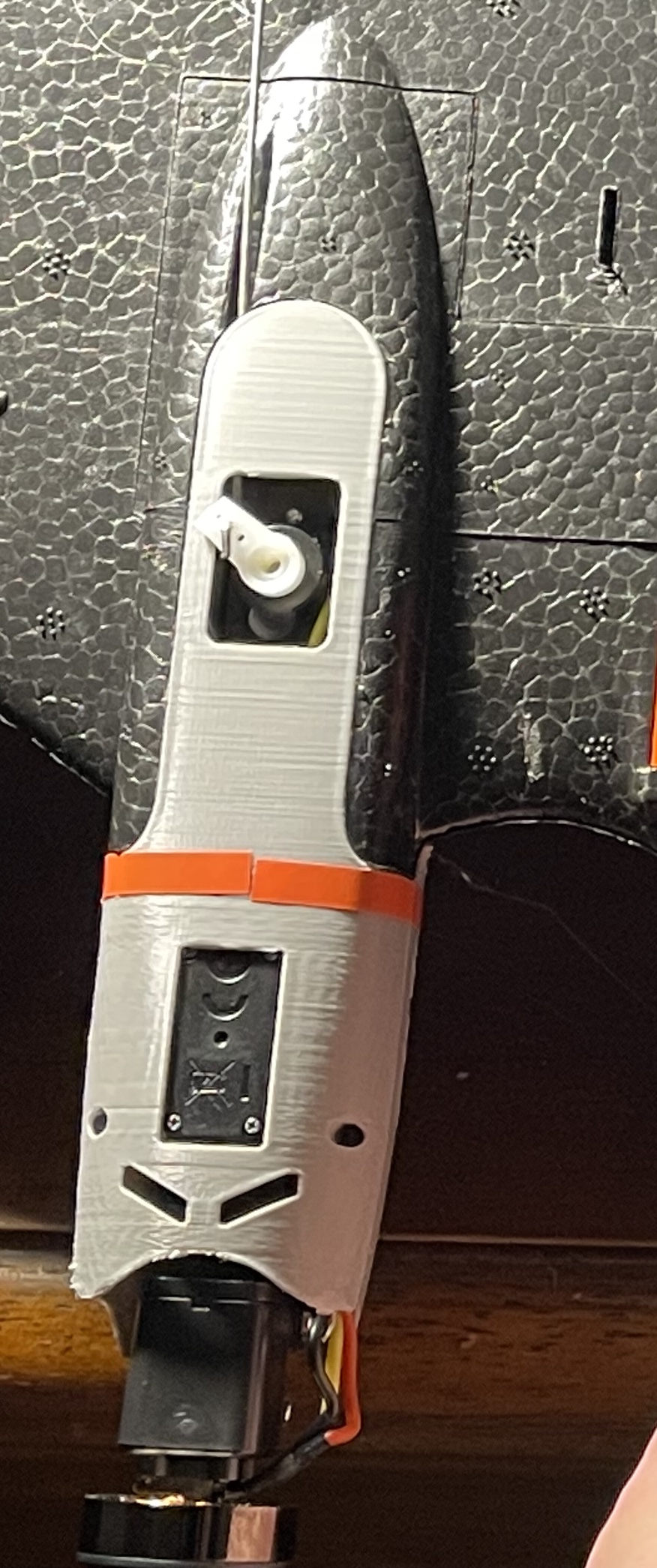
So I had an idea: I’ve removed the tilting motors and added fixed pods, used the remaining hinge for the tail vertical motor (of course I had to add the servo there), and added a horizontal pusher motor on the tail. Advantages: much better separation of VTOL flight mode, if the transition goes wrong it’s easier to stop it, possibility of using separate batteries, better MTOW (as I think transition was the main limitation here), the vulnerable hinge is much better protected. Flies great indoor in the VTOL mode, I’m waiting for better weather to test the horizontal flight. But I don’t want tilting front motors any more Manta manufacturers: if you are not providing any spares, please add this setup as an option.
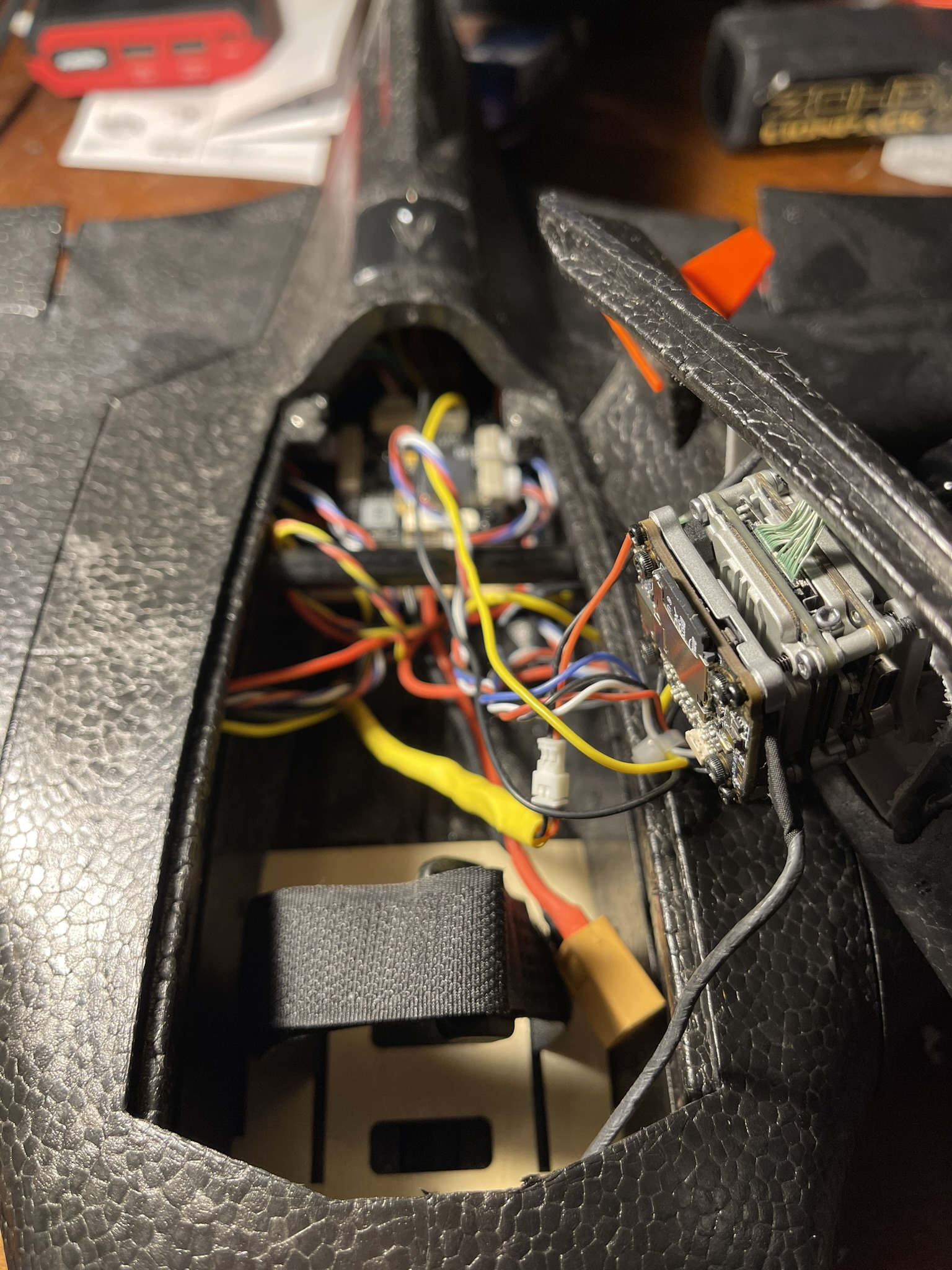
Also how about the gimbal/camera? I somehow doubt if Fimi will provide the promised G21 Pro. I hope mine mod will take WG2X gimbal (without the battery) plus Gopro 10 Black Bones (if I’ll manage to buy it).
HI, the phenomenon you described for your first flight was similar to my first flight. Later I found out that it was because there were not enough GPS satellites before ARM. Generally, 15 or more is the best. The most intuitive judgment is that the HDOP value should be less than 1. Unfortunately, I also damaged the motor hinges on that flight. I asked the seller of Manta if they had this part for sale. The seller said that they did. At the same time, the 3D printing drawings of this part are also open source. Due to the freight and express delivery, As a matter of time, I chose to print this part myself with my 3D printer. I printed it with 100% ABS infill. I hope it helps and wish you good luck!
Read the marking on the solder pad, do not believe in the color of the wires as cunzhisu said.
I have successfully flown this airplane about 20 times, but the last flight was a little scary (I was trying range test), during the transition from fixed wing to tricopter, the airplane flipped over and when I took over with QLOITER mode it moved forward on its own and almost hit my wife and my daughter
I’ve never encounter this behavior before. I realized that the wind while flying was quite strong (15-22 km/h). Maybe it is because of the wind? Weathervaning? Compass error? I will review the log tonight.
Wow lucky you got her under control. My transitions to fixed wing are perfect, but back to QLOITER seems a bit rough for a few seconds, but settles down quickly. . Perhaps a guest of wind hit the manta at the wrong time as it’s a light plane. Will be interesting to see if you find anything in the logs.
Please, does anyone see a reason for SERVO_AUTO_TRIM to be Enabled, the way the controller came out of the box?
On all other plains I have it disabled. I personally don’t like the extra degree of freedom.
My manta is flying great in fbwa, I wondering how it will handle loops and rolls. Anyone do any loops or rolls with the manta? If so what mode did you use? Any tips?
HI, if you want to perform loops and rolls, you need to do it in MANUAL or ACRO flight mode. FBWA mode limits the roll angle and pitch angle, which is more suitable for safe and calm flight.
Today I flew the manta a few times, everything works fine. QLOITER and RTL are working correctly now.
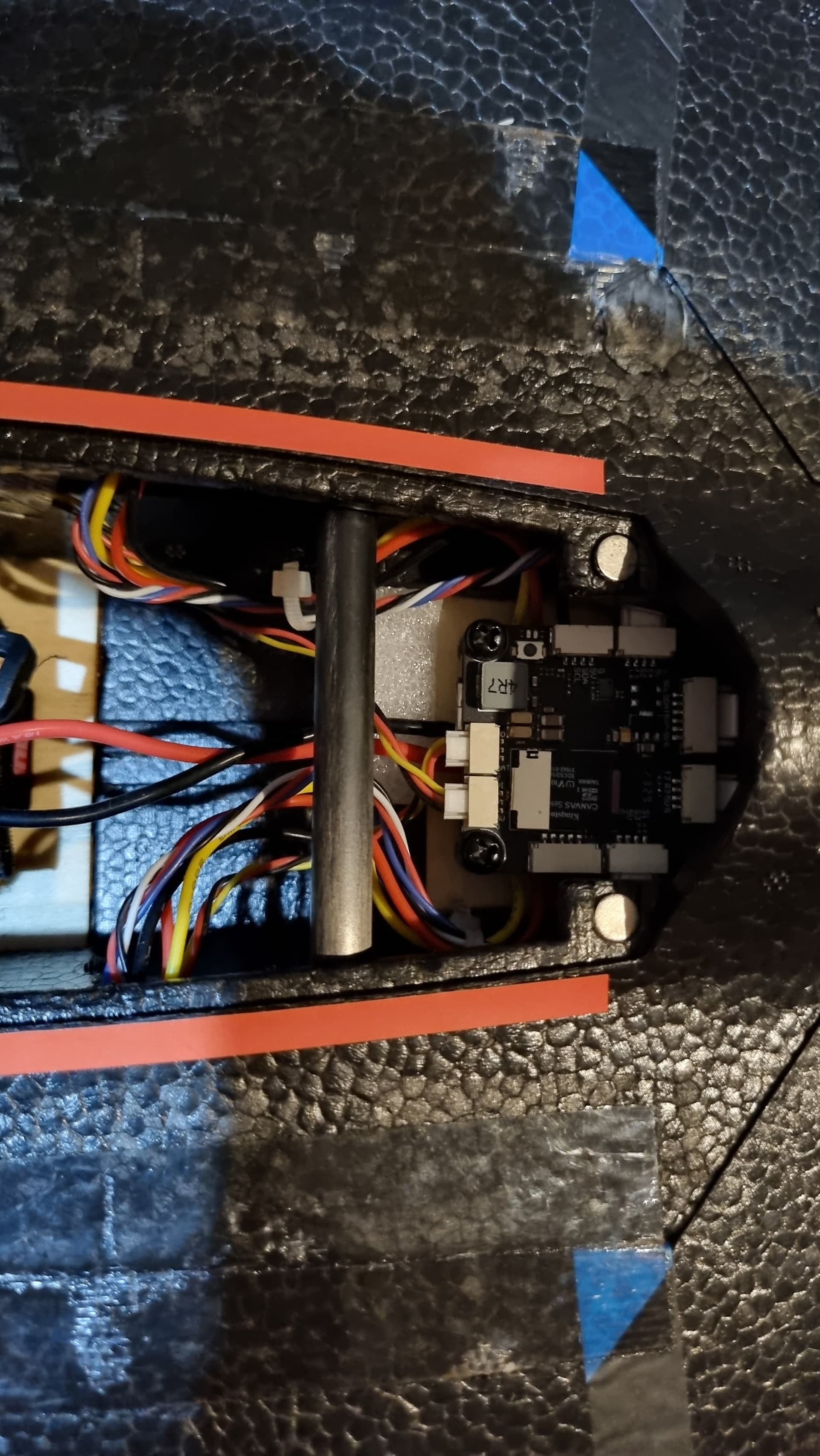
I didn’t find anything odd in the previous flights. I think the FC mount moved forward while flying a while ago, so I installed a stopper in front of it.
Strange Qloiter was perfect for six flights, but now is very unstable so much I can’t use qloitor. Hover works great. I have prechecks on and no problem arming so not sure why this problem showed up all of a sudden as no issues arming. I have 10+ sats so I assume a good gps lock as armed. I redid the level setting, etc, but no luck. Do I need to do a qautotune or should I be looking as something else first as it was working great? Is it possible some settings got corrupted as tilt motors, etc all look good? I assume no harm trying a qautotune? Any tips?
Did another test this morning as was able to launch ok in qloiter. Not quite sure why. I did a test in Qstablize first. Only other thing is I did was switch one of the flight modes and rewrote parms. Will do more testing as I’d like to find out the real problem/solution.
I never use qautotune mode, only use the initial parameters in mission planner (propeller size and battery input). What is the condition of the tilting mechanism? Mine is pretty worn out. It wobbles on its hinges, even tilting slightly to the right. I’ve 3d printed a new mounting, but haven’t gotten around to installing it yet.
In the stock mounting I added plastic washers to make it more rigid.
I did notice my tilting mechanism would move a tiny bit so I added a drop of glue to keep it tight. I think my issue seemed to caused by having QLoiter as the initial mode. And perhaps the initial gps detection had issues as I couldn’t get the manta off the ground in QLoiter. Once I switched to have QStablize as initial mode things seemed to be back to normal. I plan to do more testing if the winds settle down one of these days.
Turns out my problem with QLoiter is a non issue. Found out I should be launching in QHover or QStablize then switching to QLoiter once in the air a bit. So it was just a rookie issue.