I just looked at your parameters and they are way different than mine. I think that now that I have the servo control rods moved out to the fourth hole on the servo arms I will try and Autotune it again. Moving the control rods out really helped steady the plane with the current PIDs. I hope the Autotune will work better now. I just have to wait for the wind to calm down. Where I live it is almost always windy except for early in the morning. That is why I have been trying to get the Roll PIDs dialed in so that I can fly when it is a little windy and not have the plane rocking back and forth the whole flight.
I received mine again last friday.
I made in this second build some arrangements - like installing the vtx in the top of the fc - with a 3d printed board mount - that helped a lot the CG.
This version is the 2.0 - with the gps with compass, the flight controller has an option to turn on and off the vtx using a radio button.
I’m facing a problem with cooling the vtx - a caddx - I made a scoop for the vtx with no lucky - After a 5 minuts of flight I’m receiving the overheat message - I will do an improvement - maybe a passive cooler of even a fan.
Anyone has made or have news about the gimbal ?
Btw - after a autotune the wing is flying amazing - the only thing is not ok is the current sensor.
I’m using a molicel 4s 4000mha - with the the installation of vtx was pretty easy to adjust the CG.
1 Like
A few bench testing rookie questions.
I did a failsafe test by turning off the radio (props were off). The Failsafe message came up as expected and motors started. I though I saw a comment that suggested the manta should disarm if failsafe triggered when on ground. Or perhaps is old info. Any one know?
I also tested a QRTL switch flight mode switched and motors started. Again should the manta disarm when on ground. Perhaps a setting?
Finally if I switch the manta from manual on ground to QSTABLIZE the motors start even though I throttle control is at bottom. Is that normal. Or do I need to adjust the throttle settings?
Mine also has this phenomenon. This seems to be the idle function. Many aerial drones will rotate their propellers after they are armed.
I just flew the Manta with your PIDs and I was pleasantly surprised by the way it flew. I was flying in 6 to 10mph wind and it rocked a little when hit with a cross wind but it mostly flew rock steady. I don’t think I will have to mess with the PIDs anymore thanks to your tuning.
I also changed out the 6 inch props for 5.1x2.6x2 Gemfan props and found that it will pull less amps and fly longer. With the 6 inch props I was using around 110 mahs per minute and with the 5 inch I am using around 90 mahs per minute. Of course that is just cruising in FBWB or Cruise mode. On a really calm day I would expect to use even less mah.
Thank you for sharing the PIDs.
1 Like
I’m glad you had a pleasant flight. Recently, I optimized the parameters of manta’s multi-rotor mode, mainly to solve the problem of heading swing when hovering. For hovering in windy weather, I also adjusted the roll. Parameters,In addition, I will also try a 5-inch propeller. After all, it is a pleasure to increase the flight time.
the parameters in the red lines in the picture below are for reference only:
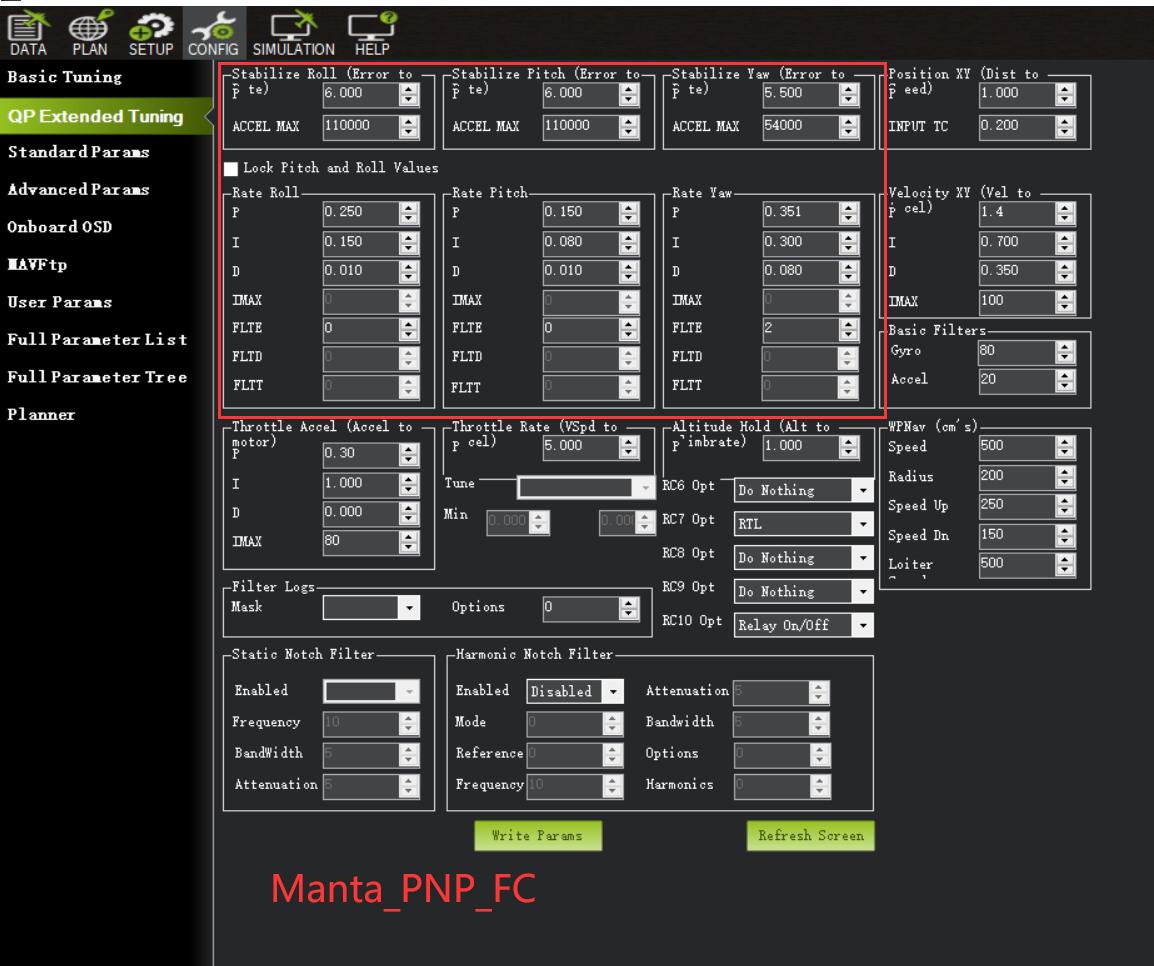
I will give those settings a try. I found that increasing the D for the Rate Yaw really helped to get rid of the Yaw swinging back and forth. I set mine at .065 and was going to see if increasing it some more was going to help. I will now use your PIDs and get the Manta to fly in Q mode a lot better than it does now, especially in the windy conditions where I live. When I moved here over 3 years ago I was talking to one of the neighbors about flying when there was very little wind, and he told me that I might have 16 days a year when there was little to no wind. LOL Most days the wind is 10 to15mph or higher.
Changing to 5 inch props will decrease the top speed of the Manta, which I don’t care about, but will give longer flight times. The 5 inch props are the exact same ones that are used on the Heewing T1 Ranger VTOL. I was surprised that I was able to fly the Manta on a 3s with the 5 inch props because the T1 VTOL does not. The T1 VTOL has to be flown on 4s. Of course the T1 has different motors than the Manta.
1 Like
Hi James,
this is practising landing small VTOLS with pinpoint accuracy and without draining the battery ![]()
Rolf
1 Like
I just flew the Manta with the settings that you show for the QP Extended Tuning and they work very well. The wagging back and forth in the Yaw has disappeared. I flew it in windy conditions and it was very steady and held position very well in QLoiter. Thanks for the work you did fine tuning the PIDs.
1 Like
Been flying mine a bit lately,and it generally flies well.
I`ve changed qstab to acro and have been flying in acro a bit,but it is quite sensitive.Need to dial down the rates and add expo.
Should I do this on my radio or in AP?
HI, you can check out Ardupilot’s official introduction to acro-mode.
https://ardupilot.org/plane/docs/acro-mode.html
1 Like
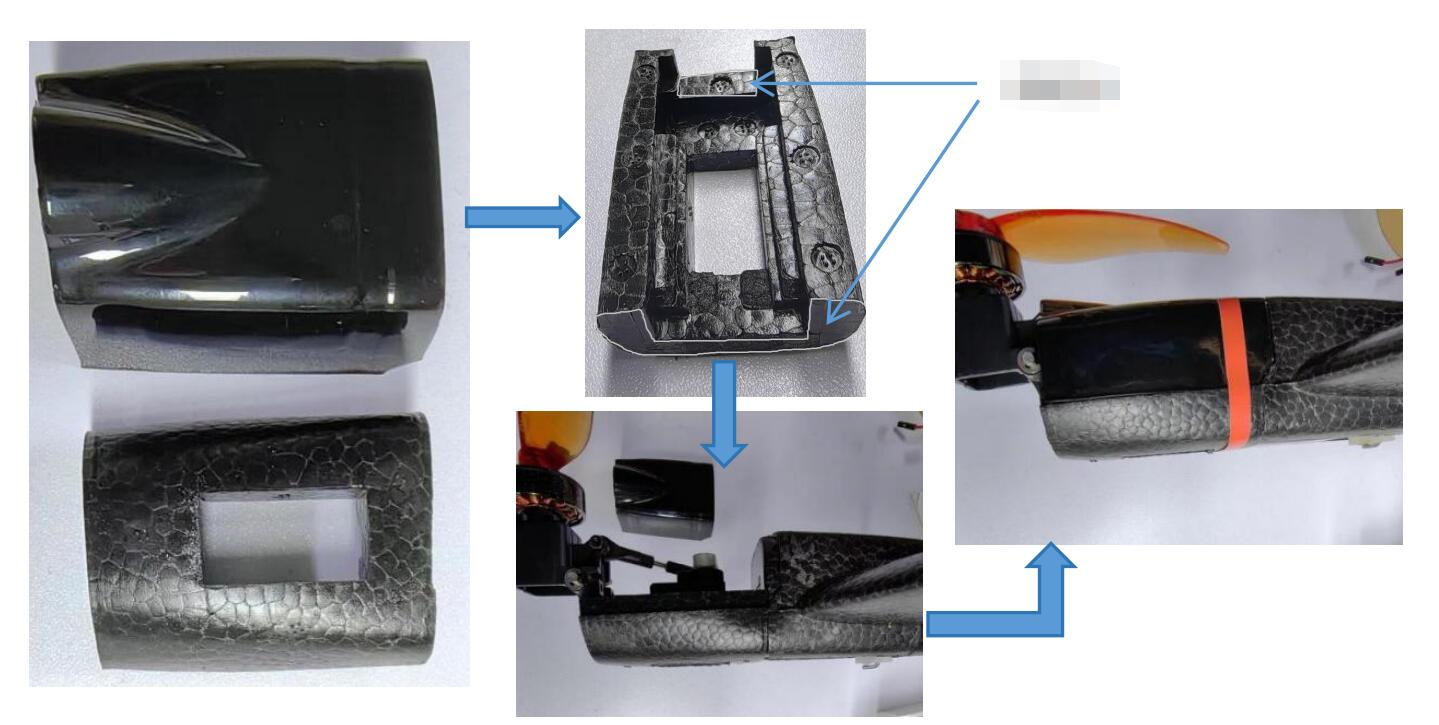
HI, I learned from FIMI after-sales service that the latest Manta has optimized the strength of the swing arm fairing and disclosed 3D printing drawings of the improved parts.
Anyone has tuned the bat metter from your manta with the fimi controller?
Mine is having 30% of difference from what is measured as total current drawned X what the charger is charging.
I made a great flight today with hard winds - 25 to 30 km/h and the manta was great.
1 Like
Happy to report had a great maiden with the manta. Using built in flight controller with default settings apart from arming checks. Next good day will try a longer flight.
1 Like
I tuned the current measurement according to power meter and my params are now:
BATT_AMP_OFFSET,-0.005
BATT_AMP_PERVLT,75
Thanks for the guide… I have my radio set up like in the guide you posted (AETR) and my crossfire Tango II radio’s inputs are recognized when I move the sticks in arduplanner, but the control surfaces only move up and down (pitch) but roll (aileron) does not move the control surfaces at all. Any thoughts would be appreciated.
HI, if you can hover stably under QSTABIIZE, it means that your remote control and Manta are matched. There is no need to test the correctness of the control surface. If you really want to test the control surface, it is recommended to switch to FBWA or use missionpalnner to set the MANUAL mode. It is more convenient to test control surfaces in these modes
Hello everyone.
I have successfully flown the Fimi Manta both LOS and FVP. The transition is going well, from QLOITER to FBWA by increasing the throttle to 90%. I’m not used to flying with FVP, so I only tried FBWA and CRUISE modes. RTL mode works fine.
This is the footage from googles recording.
https://www.youtube.com/watch?v=P84CJjCsZEE&ab_channel=RezaJatnika
Equipments:
- Stock FCC and ESC
- Flywoo GM 10 Mini with Compass
- AKK FX2 Ultimate VTX
- CADDX Baby Ratel 2
- FrSky X8R
- LiPo 4S 1300 mAh and Li-Ion 4900 mAh
- Take-off Weight around 500 - 560 gram

I will try an endurance test in the near future.
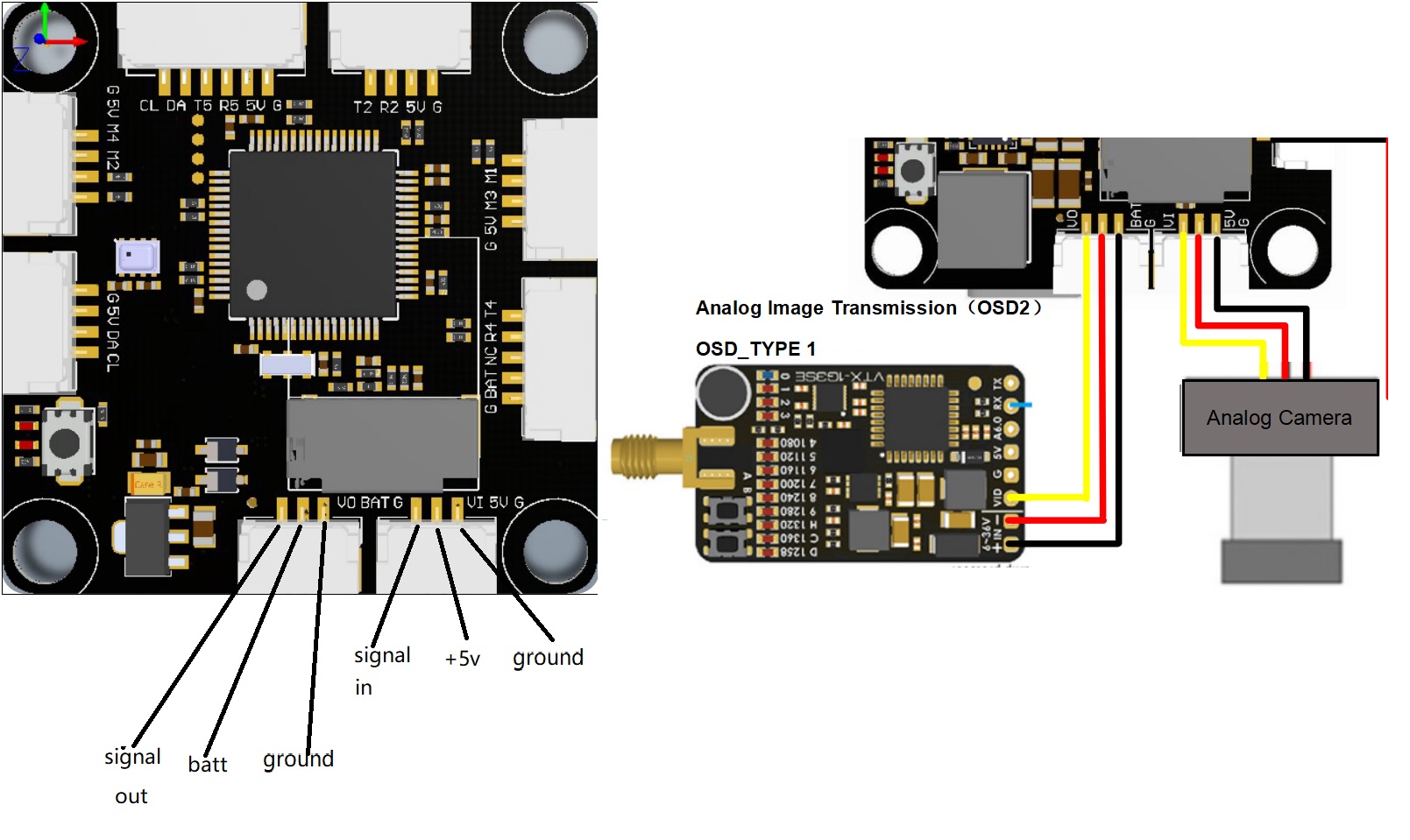
Just about getting ready to set up an analog fpv camera/transmitter.
Small question about connecting an analog camera to the built in flight controller. The supplied cable has yellow, red and black wires. When you plug the connector into the analog video input on the flight controller do the wires map as follows
yellow - signal
red - +5v
black ground
Just wondering as the nano camera I have has signal, ground and +5v I assume I need to splice the wires of the Fimi to match the camera.
DId you have to do that for the Baby Ratel 2?
Or perhaps the color of the wire on the Fimi supplied cable is irrelevant.
ie: Could be yellow - signal, red - ground and black - +5v
Thanks in advance John