Hi @amilcarlucas
Further to my earlier suggestions and in a perfect world, i would be ideal if the GUI when connected to a vehicle, read the parameters and from them write the Intermediate Parameter files for that vehicle. That would mean anyone could use your excellent GUI editing features on any machine and provide a friendlier entry for those new to ArduPilot.
To cover the case of vehicle parameters being changed outside the GUI and firmware upgrades then have a refresh mode that identifies the vehicle changes and updates the Intermediate Parameter files.
As I said a perfect world! ![]()
ArduPilot Firmware already does automatic parameter update on software updates. So the software does not need to do that.
The software gives these errors when I import your files:
Duplicated parameter BATT2_MONITOR in C:/Users/amilc/Documents/iav/ardupilot_methodic_configurator/vehicle_examples/Test MethodicConfigurator\09_batt2.param line 132
and
Duplicated parameter INS_GYRO_FILTER in C:/Users/amilc/Documents/iav/ardupilot_methodic_configurator/vehicle_examples/Test MethodicConfigurator\11_mp_setup_mandatory_hardware.param line 350
So you need to open those files with a text editor and remove the duplicated lines.
Thanks for identifying the duplicated parameters which I will delete.
I would like to clarify my above suggestion for a more user-friendly GUI.
Creating the Intermediate Parameter Files
- Connect the Methodical-Configurator GUI to a vehicle that has Ardupilot configured.
- The GUI then reads the parameters from the Vehicle and creates the Intermediate Parameter files for that vehicle.
- The parameter values on the Vehicle and Intermediate Parameter files would therefore be identical.
- The GUI is then used to edit and update the parameters on the vehicle.
- This configuration would allow anyone to use the GUI to quickly and easily start editing the parameter settings on any vehicle.
Intermediate Parameter File Refresh Mode
- This would be needed when the vehicle software has been updated using Mission Planner or the vehicles parameters have changed outside of the GUI.
- In this case the Vehicle’s parameter setting and the Intermediate Parameter files would not match.
- Have a ‘Refresh or Update’ option to update Intermediate Parameter files to match the vehicle setting.
- In this mode the GUI reads the vehicles setting and updates the Intermediate Parameter files.
- The parameter values on the Vehicle and Intermediate Parameter files would then again be identical.
The software already “automatically Creates the Intermediate Parameter Files” for 8 of the parameters files
And I do not think the 2 modes are needed and will confuse users.
Just test the SW it already does most of what you need.
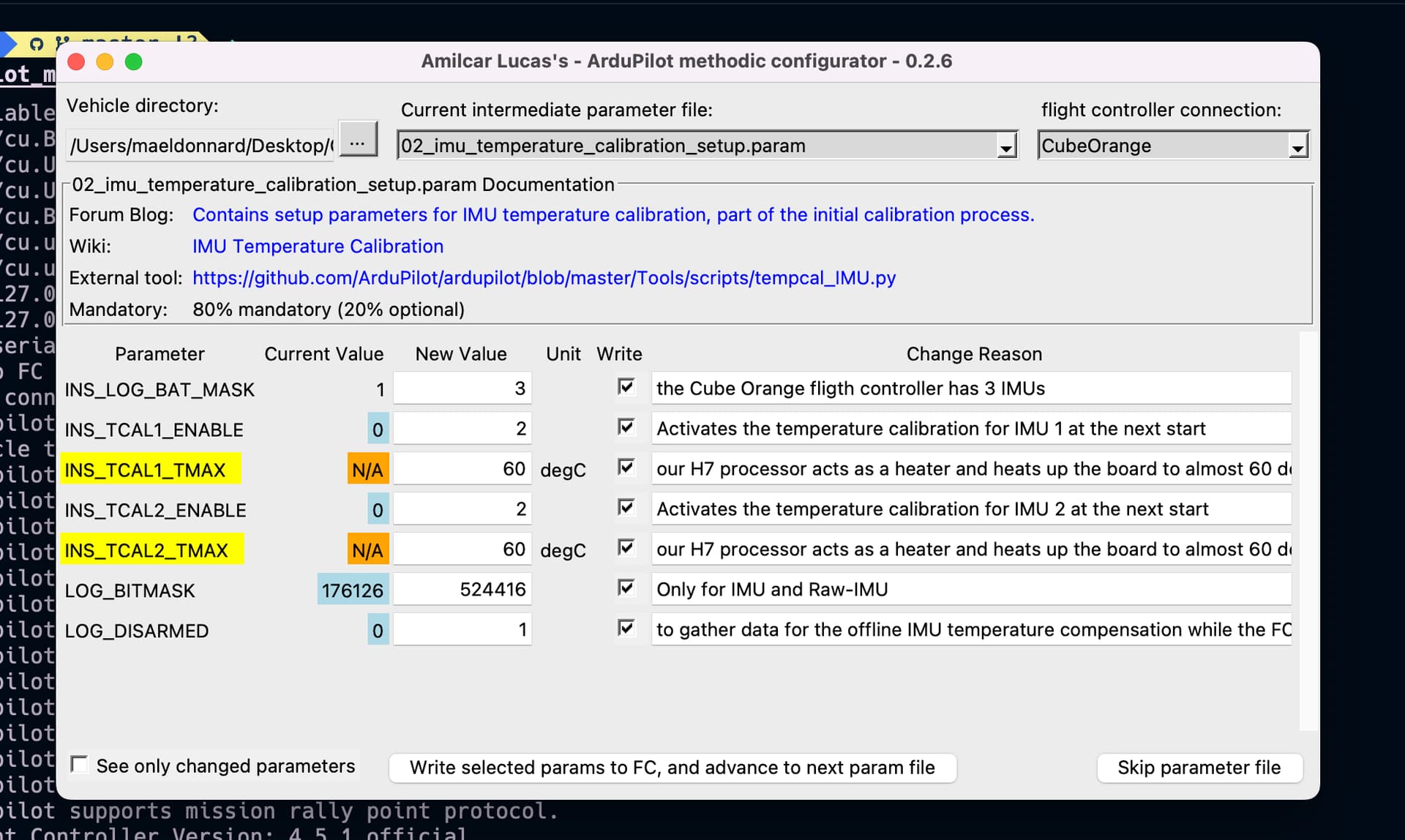
On the left you see the parameter value at the FC, on the right the parameter value from the file.
You can select to write, or not to write the file parameter to the FC
1 Like
There is a new development release with bugfixes and a new bitmask editing feature.
Yet another release, this one remembers the file you last written to the FC and restarts from there.
What do you prefer ? an install script like for linux and windows ?
For now the steps are quite simple (must be tested on different setup to be sure however) :
# Clone the project
git clone https://github.com/ArduPilot/MethodicConfigurator.git
# Use venv if you use python3 due to the PEP668
cd MethodicConfigurator
python3 -m venv venv
source venv/bin/activate
# Uninstall serial and pyserial to avoid conflicts
python3 -m pip uninstall -y serial pyserial
# Install the project dependencies
python3 -m pip install .
#Installation complete.
cd MethodicConfigurator
python3 ./ardupilot_methodic_configurator.py"
The cube is perfectly detected
And no issue to read the parameters
1 Like
I would prefer a githubworkflow MethodicConfigurator/.github/workflows at master · ArduPilot/MethodicConfigurator · GitHub
1 Like
Version 0.2.9 just released:
- Also write last written filename if no parameter was different (Dr.-Ing. Amilcar do Carmo Lucas)
- make some functions private (Dr.-Ing. Amilcar do Carmo Lucas)
- remove duplicated “udp:” string in example text (Dr.-Ing. Amilcar do Carmo Lucas)
- Add a motor configuration step and five quick tune steps #7 (Dr.-Ing. Amilcar do Carmo Lucas)
- fix the generation of the coverage xml report #7 (Dr.-Ing. Amilcar do Carmo Lucas)
- Also run coverage reports on the master branch (Dr.-Ing. Amilcar do Carmo Lucas)
- Coverage reports only work on pull requests (Dr.-Ing. Amilcar do Carmo Lucas)
- correct information when documentation is not found (Dr.-Ing. Amilcar do Carmo Lucas)
- Grammar fixes in comments (Dr.-Ing. Amilcar do Carmo Lucas)
- Optionally annotate parameter documentation and metadata as comments into the intermediate parameter files (Dr.-Ing. Amilcar do Carmo Lucas)
- Bump the version (Dr.-Ing. Amilcar do Carmo Lucas)
1 Like
Thanks for your hard work. Do you think it would be possible to put all the information (methodical tune thread & GUI configurator links etc.) into the official Ardupilot docs somewhere? Happy to help with copy-pasting, screenshots or whatnot.
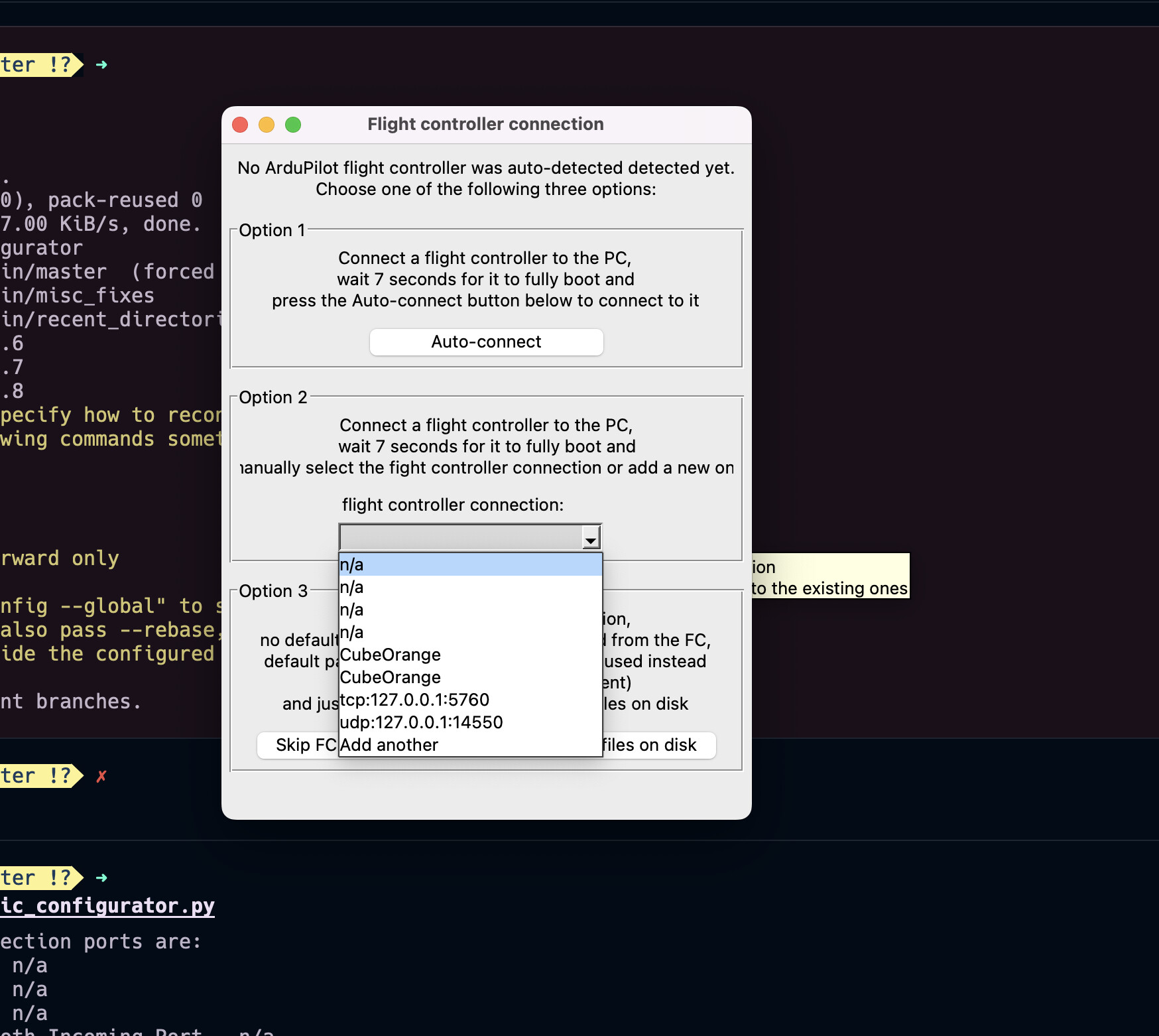
Hi, since this program was released I have never been able to go beyond the screen present here…every time it tells me that it can’t find the intermediate parameters…if someone can teach me in a simple way how to do it to be able to go further I would be grateful to him otherwise I will abandon that is, I will continue as I have always done in recent years…manually doing the various steps…I’m sorry that I would have liked to have a tool that would make it easier for me and direct me to the various steps to follow to do… I’ve been trying and trying for days but I can’t go any further…

Sure, Here it is.
- Use option 1
- As template source Select the diatone_taycan_mxc directory and after that the 4.5.1-params
- Leave the destination base directory unchanged
- Edit the text “My vehicleName” to something more descriptive.
- Press the button “Create vehicle directory from template”
Done
Next time you get stuck, ask for help instead of waisting your time.
The files get created on the directory you specified. So the next time you open the program, use option 2 and open the directory you just created
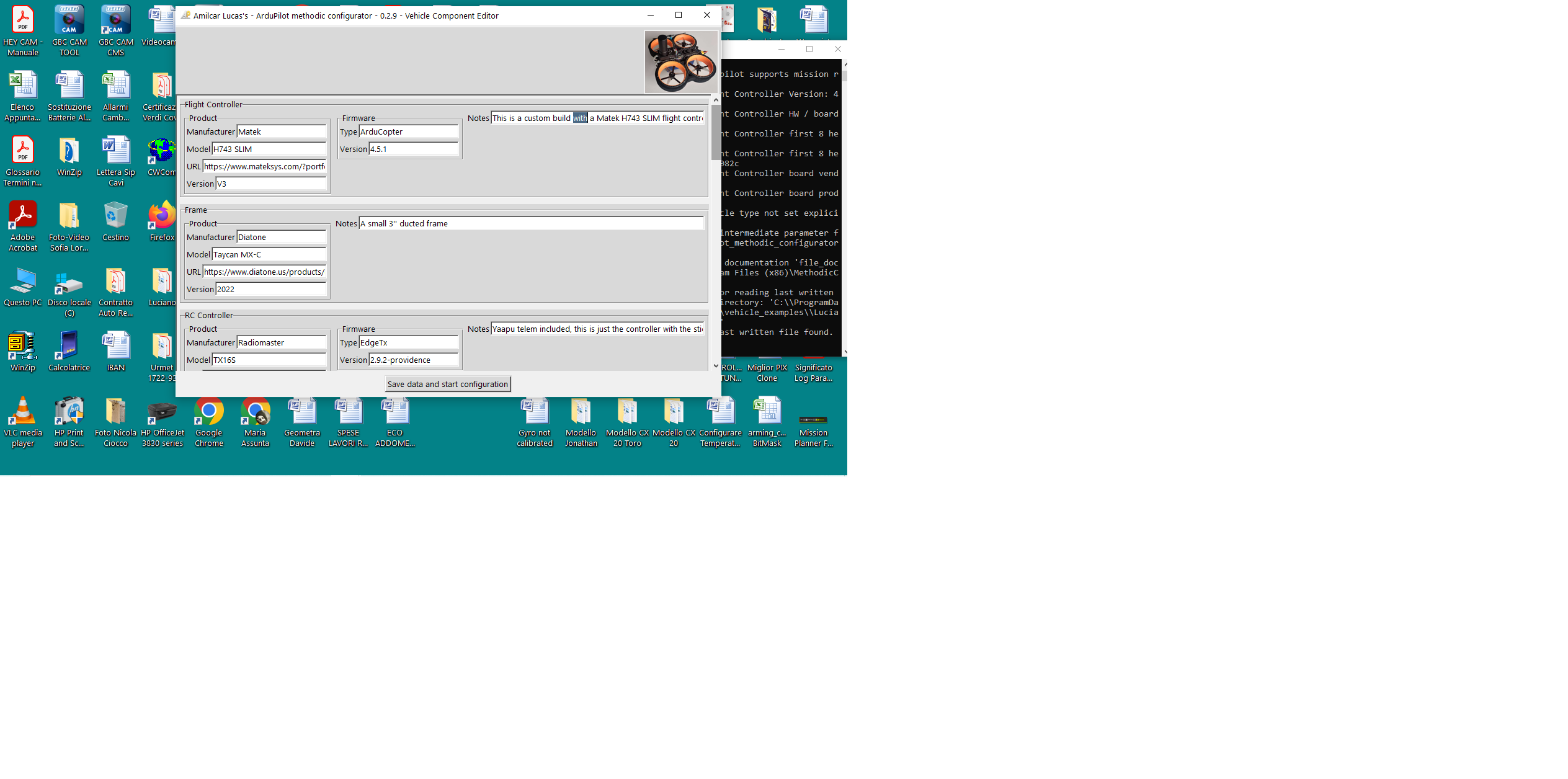
Thank you amilcarlucas for allowing me to continue using the program…I arrived at this window following your instructions…but I see that another tab is set (The problem is that the intermediate parameter files created are for a Matek H743 flight controller ) and not my pixhwak… .how do I set up my pix in the program.
Thanks again for helping me improve my learning.
Hello Luciano,
The matek is a template. As all templates it is a starting point that you need to modify to meet your needs.
You need to change all the values to match your vehicle.
Version 0.2.10 has a critical bugfix, please update ASAP
- Simplify and update the README.md (Dr.-Ing. Amilcar do Carmo Lucas)
- use the new windows installer filename explicitly (Dr.-Ing. Amilcar do Carmo Lucas)
- Spellcheck in GUI text (Dr.-Ing. Amilcar do Carmo Lucas)
- Simplify the test code and remove a FIXME (Dr.-Ing. Amilcar do Carmo Lucas)
- allow configuring option2 initial directory (Dr.-Ing. Amilcar do Carmo Lucas)
- cope with out-of-order and missing/unused BITMASK key entries (Dr.-Ing. Amilcar do Carmo Lucas)
- Bump version (Dr.-Ing. Amilcar do Carmo Lucas)
1 Like
Version 0.3.0 introduces forced and derived parameter support it is now possible to implement the initial parameters spreadsheet inside the methodic configurator without changing a single line of python code! ![]()
Currently around 35 parameters get automatically set without user intervention, but the number will grow.
- Improve the Bitmask bugfix in corner cases (Dr.-Ing. Amilcar do Carmo Lucas)
- Remove code duplication, make it easier to add modular command line parameters (Dr.-Ing. Amilcar do Carmo Lucas)
- allow selection none as flight controller device on the command line (Dr.-Ing. Amilcar do Carmo Lucas)
- allow skipping the component editor windows via command line parameter (Dr.-Ing. Amilcar do Carmo Lucas)
- add component editor command line description (Dr.-Ing. Amilcar do Carmo Lucas)
- Small parameter file values changes (Dr.-Ing. Amilcar do Carmo Lucas)
- Force the value of 30 parameters, the user is not supposed to change these (Dr.-Ing. Amilcar do Carmo Lucas)
- Make sure only one bitmask window is possible at a time (Dr.-Ing. Amilcar do Carmo Lucas)
- Refactor parameter table to it’s own file (Dr.-Ing. Amilcar do Carmo Lucas)
- prepare validation of derived parameters (Dr.-Ing. Amilcar do Carmo Lucas)
- Move template files to vehicle type subdirectory, to allow future expansion with ArduPlane, Rover, etc (Dr.-Ing. Amilcar do Carmo Lucas)
- remember last selected directories on windows #5 (Dr.-Ing. Amilcar do Carmo Lucas)
- pylint fixes (Dr.-Ing. Amilcar do Carmo Lucas)
- Initial work on derived parameters, derive 5 parameters from the information inputted in the component editor (Dr.-Ing. Amilcar do Carmo Lucas)
- Bump the version (Dr.-Ing. Amilcar do Carmo Lucas)
1 Like
You need to manually give write permissions for your user to the file:
C:\Users\YOURNAME\AppData\Roaming\.ardupilot_methodic_configurator\settings.json
sorry for that, It will get fixed in the next version.
Hello Amilcarlucas, I am using the 0.3.0 version of Methodic Configurator. I have connected my FC to computer and editing the parameters. However i am not writing them to FC, i am choosing skip parameter file and everytime it asks whether i want to save those values in that particular param file, so i click yes and it moves on to next param file. This was what i wanted but when i did the same for ESC.param file and clicked on “skip parameter file” instead of asking to save the params the program shut down. When i reopened the ESC param file the values and the reason that i had written were saved but when i manually select bat1.param file from drop down above the program again shut down. Can you please look at this.
I am using 4.4.4 param files as template. And my vehicle directory is in D folder whereas the application is installed in C folder in case this info is needed.
Thankyou
There is something wrong with your bat1.param file. post it here.