The latest version is 0.1.9. Available as:
3 Likes
I released 0.1.10 yesterday. It improves the about box and has better “add connection” handling
1 Like
Hi @amilcarlucas !
Thanks for releasing this project! Do you think there’s a way to connect it to the Mission Planner SITL instance?
Yes, there is, just select the udp connection.
New release with tons of new features and improvements.
Mainly improved user friendliness. User Manual is mostly updated with the new features.
One of the big new features is the component editor:
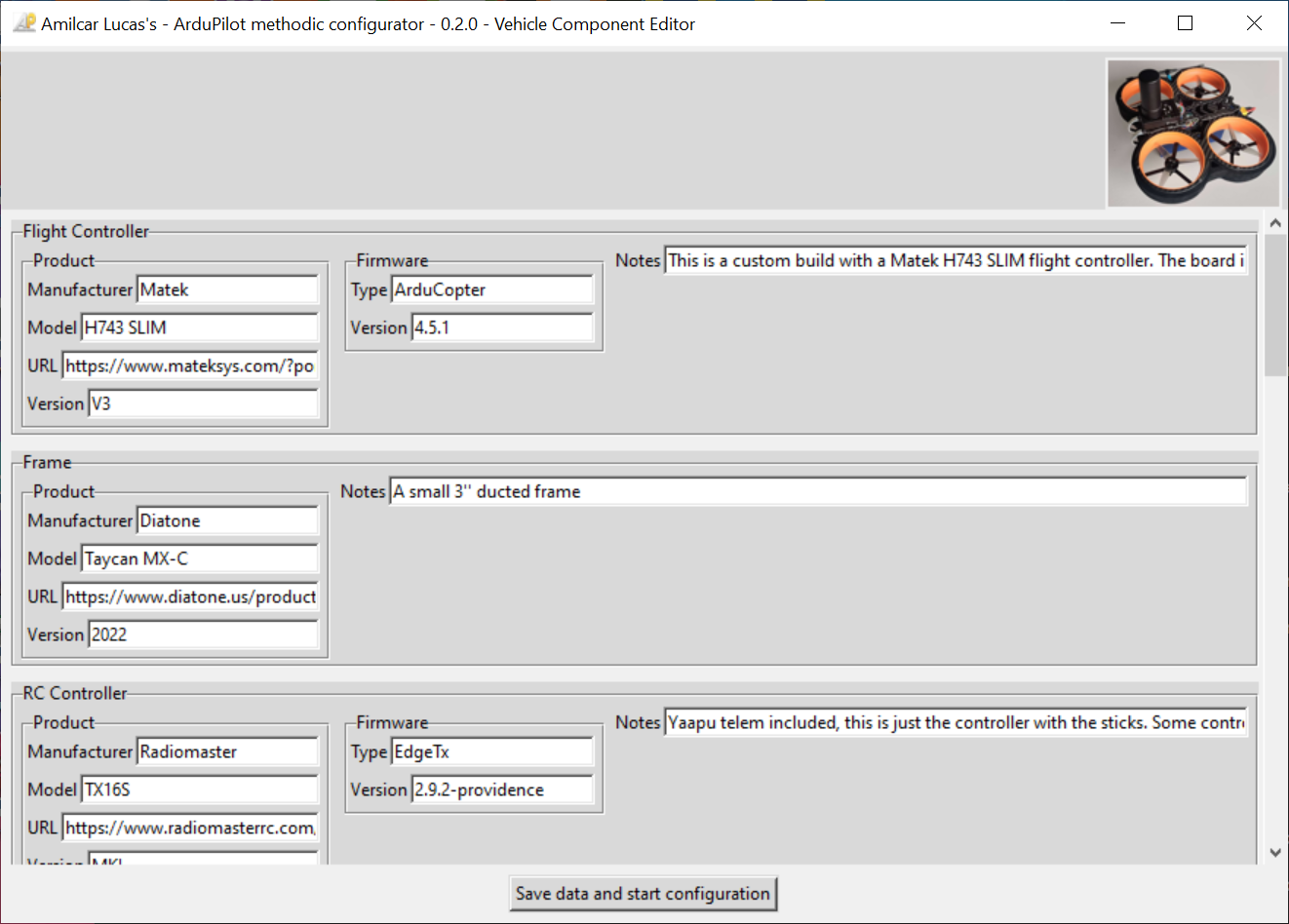
You can now store all relevant component information in one place
- Product
- Firmware
- Specifications
- FC connection and
- Notes
Basically this is the second part of Section 1, but on steroids ![]()
2 Likes
Just did the install on windows and worked without a hitch. Thanks!
1 Like
Thanks for the feedback.
One detail on windows it works best when you start it using the desktop icon
I noticed when you’re not connected to a flight controller and trying to build a parameter list, every time you save a param file you will get an error box reminding you that you aren’t connected. The saved files still work but it’s a bit irritating.
What would be your suggested work flow when dealing with controllers that have different servo outputs? For example currently working with the Matek H743-Wlite and I need to setup the motors on 2-6 (same dshot group). The configurator defaults 1-4. I can manually fix the param files in VScode, but I wondered if there was a way to use the configurator.
1 Like
If you do not have a FC connected you are supposed to press “Skip” instead. It will do the same thing, but without reminding you that you aren’t connected.
Currently you need to change the files manually with VScode.
1 Like
A new version is out 0.2.3. It integrates tempcal_IMU.py inside it so that you no longer need to install that. And also no longer need to install python, pip, pymavlink, numpy and matplotlib. ![]()
1 Like
Works perfectly on macOS, i’m doing an install file if someone need one. Thanks @amilcarlucas ! great work !
1 Like
Please do a GitHub pull request, I would love to offer macOS install packages

Hi, I’m a beginner and I would really like to use this interface to best configure my drone… but unfortunately I can’t go beyond this screen… I don’t know where to get intermediate parameter files… I tried to insert " MyVeichleName" the name of my drone but nothing… it tells me that it hasn’t found intermediate parameter files… if someone can help me step by step by showing me the various steps as a true beginner. I read the manual several times but I couldn’t understand how to proceed with the program. Where do I find these intermediate parameter files also??? I installed on windows 10
Thank you
On windows you must use the desktop icon to start the application, and then the intermediate parameter file templates are on the vehicle_examples subdirectory
Can I please ask for some help as I’m having trouble with the app crashing if using Option 2 and select any folder other the ones that were configured by the installation or Option 1. I’m using Windows 10.
E.G.,
If I select this folder it works
C:\ProgramData.ardupilot_methodic_configurator\vehicle_examples\MyVehicleName\MyVehicleName\diatone_taycan_mxc\4.5.1-params
If I select this folder which I created it crashes.
C:\ProgramData.ardupilot_methodic_configurator\ARRIS
Both folders contain intermediate parameter files.
Also the folder selection boxes don’t remember your last selection e.g., Option 2 box always has this folder selected.
C:\ProgramData.ardupilot_methodic_configurator\vehicle_examples. Defaulting to your last selection used would be great.
Re the last question the ‘Intermediate Files’ are the individual parameter files like ‘04_board_orientation.param’
Zip your created folder and send it to me so that I can analyse why it crashes.
I will implement the option to remember the last selected folders later. Thanks for the idea.
Yes that is what an intermediate parameter file is.
1 Like
Here is a link to a zipped file of the folder that contains some existing vehicle configuration intermediate parameter files. As soon as I select the folder and click OK the GUI crashes.
Test MethodicConfigurator.zip - Google Drive
You asked in the bog ‘How can we improve it’?
I think your system of using a GUI to efficiently edit the intermediate parameter files is excellent.
The main problem from my understanding is that the Intermediate Parameter files that are created are for a Matek H743 SLIM flight controller, Diatone Taycan MX-C frame, and various other pieces of hardware. If you use a different FC and components, you have to find the differences between the above hardware and your new system and methodically check and change as needed all the intermediate parameter files. I think the time needed to do this negates the savings gained using the Methodical Configurator and opens up the opportunity for error. This would be a daunting task for someone new to ArduPilot!
Can I suggest the following?
When Mission Planner loads the firmware onto a new flight controller it senses what flight controller it is and loads the applicable FC parameter setting and sets the remaining parameters to the default values.
Do something similar when creating the Intermediate Parameter files.
Option 1
Select or sense the Flight Controller as in Mission Planner.
Set the Destination Directory
Enter the Vehicle Name
Press the button to create the new Intermediate Parameter files that relate to the FC and set the remaining parameters to the default values.
Sounds easy but Imagine that would involve a lot of work??
I agree with what KiwiDrones said… for me as a beginner it is impossible for me to use this new method… and unfortunately if it is not made more accessible even to those who know nothing about programming, many will not use it… I’ve been around it since it was made available… and to date I haven’t been able to use it due to the complexity I’ve encountered… I’m hoping that, as KiwiDrones says… it will be made easier to use … it will be more automated… so that the steps to make it work are within the reach of even the normal user who builds a small drone… and not just for those who understand programming… software.
Both of you make valid points, thanks for the feedback.
Feedback is the best way for the app to improve.
The app already automatically detect s the firmware type and version as well as the vendor id and product id.
That data is not yet used further but it is already available.
The software is under development and is not finished yet.
this is done because the world of car construction will increasingly shrink…in favor of ready-to-use drones…while we need to encourage…with prg… software …app… …whoever is entering this fantastic world…the software…the application…despite its complexity, it must have an easy-to-use interface…understanding even for the novice… …Anyway, thanks for what you and the other developers do to keep us improving in this hobby.