There are many issues here. It is a generic Pixracer that has a MPU6000 and MPU9250, no standalone MAG. That does not match any official Pixracer spec. The GPS is also generic. The only thing I can confidently support is the mRo airspeed sensor. Since the I2C HMC5983 MAG on the GPS and the Airspeed sensor both work when used standalone, my best guess is a wiring issue.
We do offer a 5525 which is supposed to be an upgrade to the 4525.
Sorry mark, it is a 4525 v1.1 not a 5525. I was just differentiating it from the 5v logic 4525v1.0.
And yes, everything other than the sirspeed sensor are clones as i am brand new to this and have already crashed the first platform on the first flight (pilot error) and have also crashed the second platform on the first flight (again, pilot error) and as such i was trying to atleast get things sorted so that i can have some success before i invest in the ‘real deal’.
I will happily vlog for others, that this is not a good idea as i now know, because although the case of this stuff (loosely meaning anything from china sold cheap on BG, ali, ebay, etc) looks similar to the real thing, internally they are too different and not a workable proposition.
Regarding good investments: it is rare (in my experience) to damage the FC or GPS (or other sensors) in a crash, even with racing quads. Props, motors and ESCs are a different story
So my opinion is that the extra money you spend on your control electronics should save you time and money spent repairing airframes and replacing props etc. Not to mention the time and frustration involved when dealing with suspect hardware.
Yes, i have been so far able to salvage equipment from each crashed platform to install in the next. However i wasn’t sure this would be the case initially when buying the equipment. Also there is the potential to loose it all with a crash into water etc,
But you are right about the time spent trying to get clone equip working,
It is however, a bit confusing for the naive, it’s not like there is ‘ardupilot’ branded hardware and everything else is a copy. Instead there is many brands and many more copies, maybe even copies of copies. I also have a holybro pixhawk 4 with the associated external gps/mag and power module, but i dont know if it is a proper Flight control either, I thought the pixracer clone, i purchased would have the same hardware as the ‘original’ (if there is one such original) but that the fc i purchased would not have the same QC as the real one.
For the new like me It’s different to the proprietary systems, in which its very obvious to see a dji phantom for sale at a local electronic store for example, and i know that its the genuine dji product.
With open source, if i decide i want to have an ardupilot based flight control system, there is not one such genuine ardupilot hardware, theres endless confusion for me about pixhawks and pixhawk4’s (not to be confused with PX4) which are really a pixhawk 1, the predecessor to a pixhawk 2, and there are mRo and holybro and 3dr who all seem to make their own version of each FC, whose product is the real one and whose are copies? My holybro pixhawk4 looks like a 3dr pixhawk4,
Sorry for the rant, i realise that the answers to all my questions are in the ardupilot docs and forums already, i just have to keep reading and learning as i go.
Scott
I agree that with the open source designs that you don’t know what you’re buying unless you go to a trusted distributor. The closed designs are not so easy to stamp out with counterfeit parts though. Two brands of low-cost components (some of which I know are supported by ArduPilot) are Matek and Kakute, and these are available from distributors like getfpv and teamblacksheep.
One example, the Matek F405-Wing, has a large presence on the forums in threads like this one: E-flite Convergence Using Matek F405 Wing
Thanks for the advice there, I might try this FC next.
as for the airspeed, I have given up on the pixracer clone for now and installed a new holybro pixhawk4 which i had in a box instead.
The airspeed and gps works (they are on separate i2c ports) but the system gives no pwm output at all!
I will start searching for any existing threads related to this issue.
Digging up this old thread, to ask a question that is pretty blatant to me but haven’t found any indication of an answer online.
The sensor is supposed to be factory calibrated against temperature. In fact, one of the calibration coefficients is the pressure offset (C2).
If this is so, then why do we need to calibrate it on every boot?
To be fair, ARSPD_OFFSET values on this thread have been reported as high as around 100, and in my experience I get as high as 210 (Pa) and these are withing the accuracy spec. of the sensor (1.25%Full Scale Span).
But if it is so, I shudder to think what this sensor would spew out if the calibration coefficients are not used.
Do you find it normal for the sensor to have so large zero offset, given its advertised calibration?
Hi George,
I havent looked at the offset after calibration, but there was no large zero error (or spanning error) even before calibrating so i was never to worried about that.
1.25% of fs (1psi for my sensor) is about 86pa by my calcs.
There was always a large amount of variation in zero airspeed signal on mine, it can vary from 0 to maybe 5m/s on the gcs when in still air on the ground and i have not yet discovered where who’s is coming from. Maybe the sensor itself or maybe noise on i2c? But probably the former i think.
Since the sensor can range ±1PSI, I’d even allow for 172Pa. And if we consider that usually the ICs are binned and the best ones are sold at the higher category, I’d even be okay with skewed statistics.
A crucial point: I’m not talking about the offset calibration Ardupilot does on boot, which samples the offset and re-sets the ARSPD_OFFSET. Yes, after that procedure, measured airspeed should be close to zero.
I’m talking about the value of ARSD_OFFSET itself, which I get around 200, and other users have reported 50-100. If the sensor is supposed to be pre-calibrated and the driver uses the calibration coefficients, then it seems strange to me that we are getting so large ARSPD_OFFSET values.
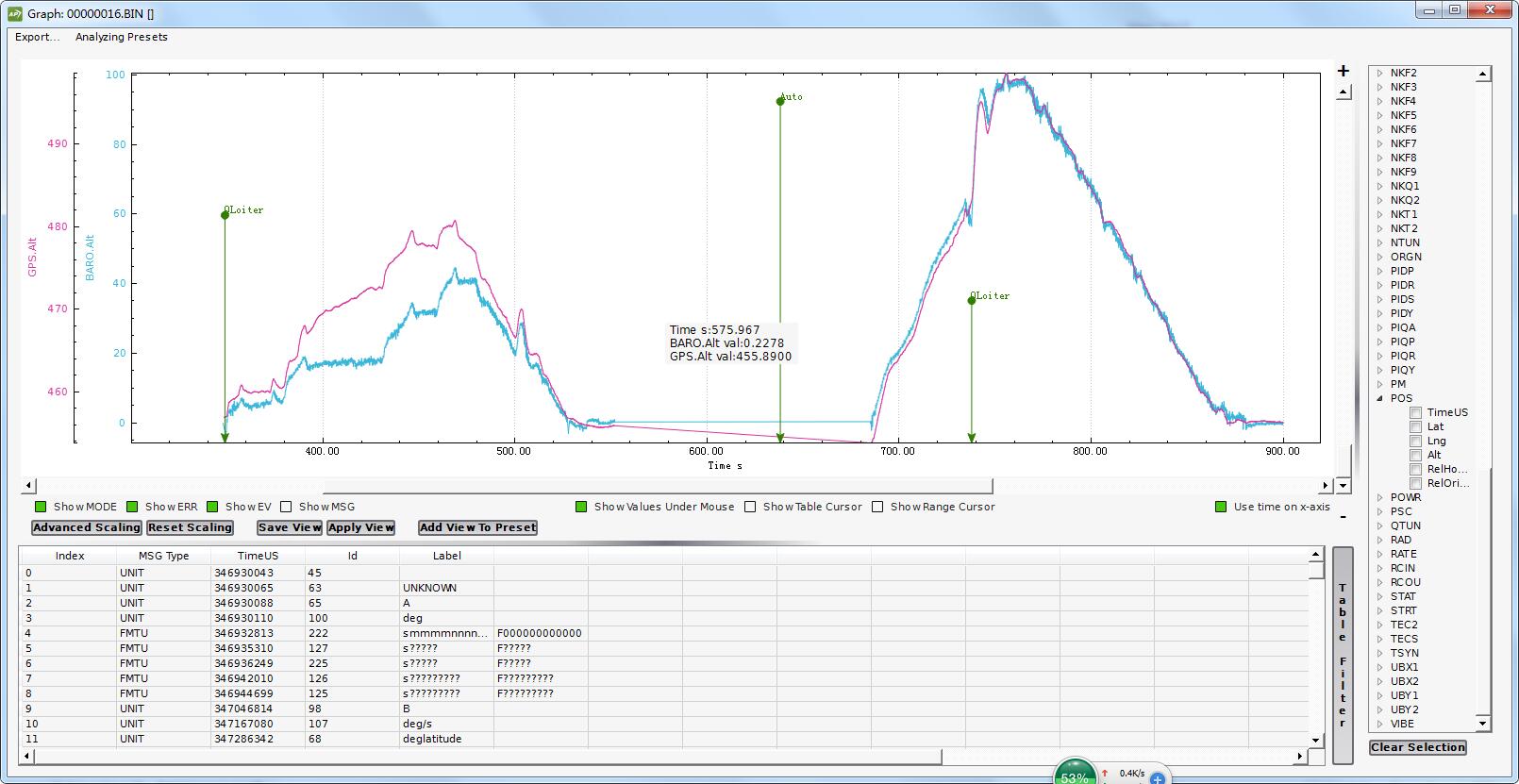
I have the same problem as you.I used Pixhawk 2 flight control, firmware version 4.05, VTOL fixed wing test.I would like to use a dual airspeed meter on the fixed wing for added safety.MS4525 works very well, but instead of MS5525, When I did the hover test, I found that the height was higher than the real value. I don’t know what caused it. I wonder if the barometer was disturbed and the display was abnormal.
Hello @makeflyeasy, how do you setup/configure in MP (Mission Planner) to use dual airspeed sensor (how to configure dual id for them)? And how to choose the best of the like we use dual Gps, that we can choose only the correct/best…Tks…
Hello!I configured MS5525 in I2C 1, MS4525 in I2C 0, using a dual airspeed meter, MS5525 has a higher priority, this is just a backup.If the first priority airspeed meter is abnormal, the second airspeed meter can be activated and continue flying.I also have dual GPS and dual external compasses (IST8310 and HMC5883).Attached is my parameter configuration information.20200713.param (21.6 KB)
Hi, I stopped using airspeed very long time ago. MS5525 definitely doesnt work properly, whoever whatever they say. some producers wrote that has “superior” performance, etc. non of them true. i guess autopilot uses this as barometer or something, some really strange behavior. The best airspeed sensor is no airspeed sensor.
Hi Artem_Skorsy,
If you don’t use airspeed sensor at all, how the autopilot avoid the stall speed? I ask this question especially for the Quadplane case. We need real data from airspeed sensor to determine the limit of real “quad assist” speed, that is the speed that the quad motor still work to assist lift of the quadplane to avoid stall…
I understand GPS speed may do this job , but that is not real airspeed data. May I know, do you deal with quadplane or plane? I really need information from experience users, about this issue… That Quadplane is safe to fly without airspeed sensor… Is that true ??
The picture above is my flight data for today, and the ALTITUDE shown by the GPS is clearly different from the altitude of the barometer.My observations from the ground show that the height is significantly higher.