Hi everyone,
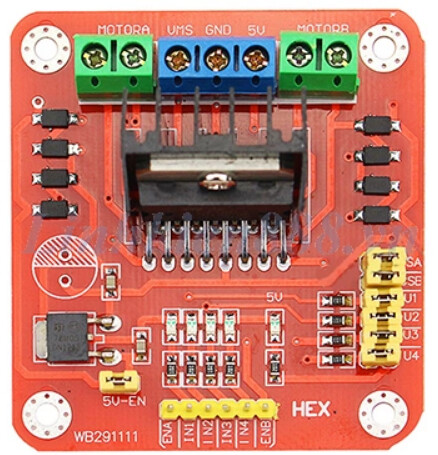
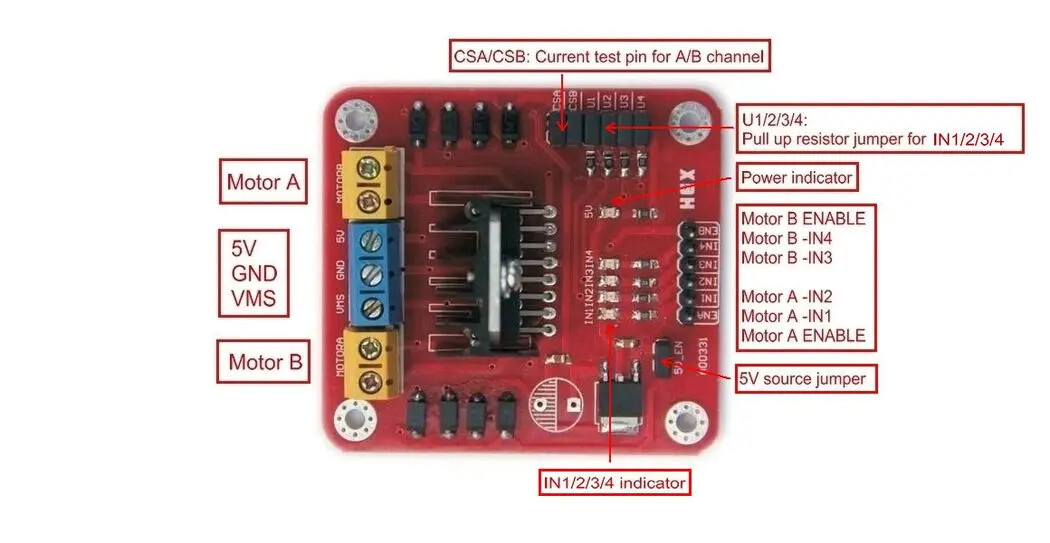
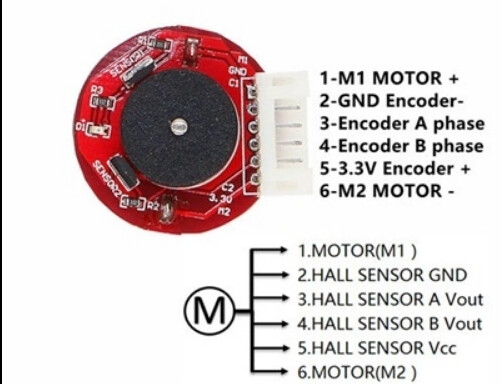
My rover project is using two L298N V2 motor drivers to control 4 JGB37-520 DC Geared Motors.
I am thinking of the Skid-steering mode but I couldn’t set it up. When I tried the Motor Test, nothing happened and it said that “command was denied by autopilot”. Maybe it’s wrong in wiring, I am not very familiar with this electronics stuff. If you have time, please help me in detail with the wiring. I have already read many discussions about this L298 driver on the forum but I couldn’t find the solution.

This is our wiring diagram, further wiring information are below:
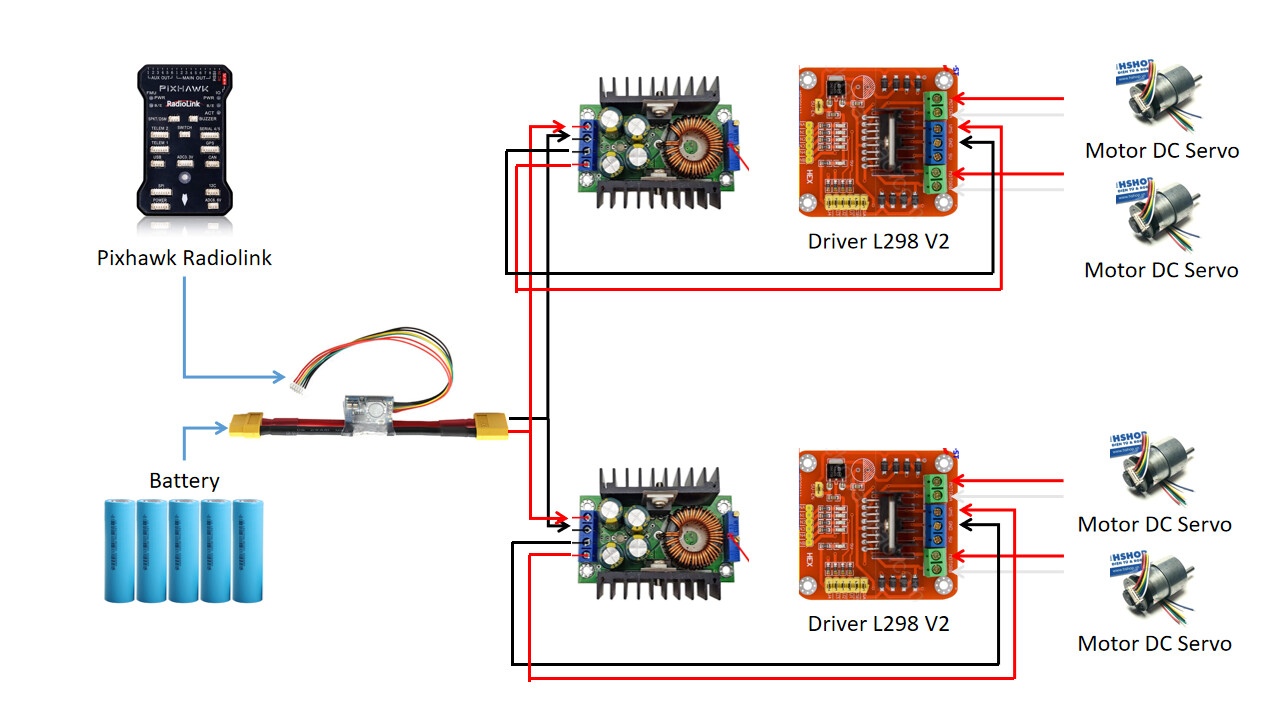
Using the skid-steering method, each L298N driver control 2 motors for each side of the rover (left and right).
To connect the L298N driver and Pixhawk, I wired ENA and ENB parallel and connect it to Main Output 1 on Pixhawk (Signal port - the last row). Because I think that ENA/ENB input PMW signal. I wired IN1 parallel IN3, IN2 parallel IN4 (motor A are 1-2 and motor B are 2-4). Then I connected them to the +/- port on Pixhawk (the first and second row).
I see that there is another output method called “Brushed with relay”. But I don’t really know how to wire them.
I am using the Radiolink Pixhawk with ROVER V.4.1.5 firmware via Mission Planner. If you need any more information, please tell me.
I truly appreciate it if you could help me soon. It’s near the deadlines and I have been stuck on this for a few weeks.
Have a nice day. Best wishes.
