Hi,
I’ve just started the process of tuning my rover.
I’m currently running the latest ardurover code
from the master branch
3.2 - rc2 .
I’m running a version with pivot steering fixed in auto and steering mode.
I’m also running the code via Navio2 with a reach rtk module.
when I first started I initially set my waypoints like this . Some of the waypoints were placed very close to each other (around 0.5 metres)

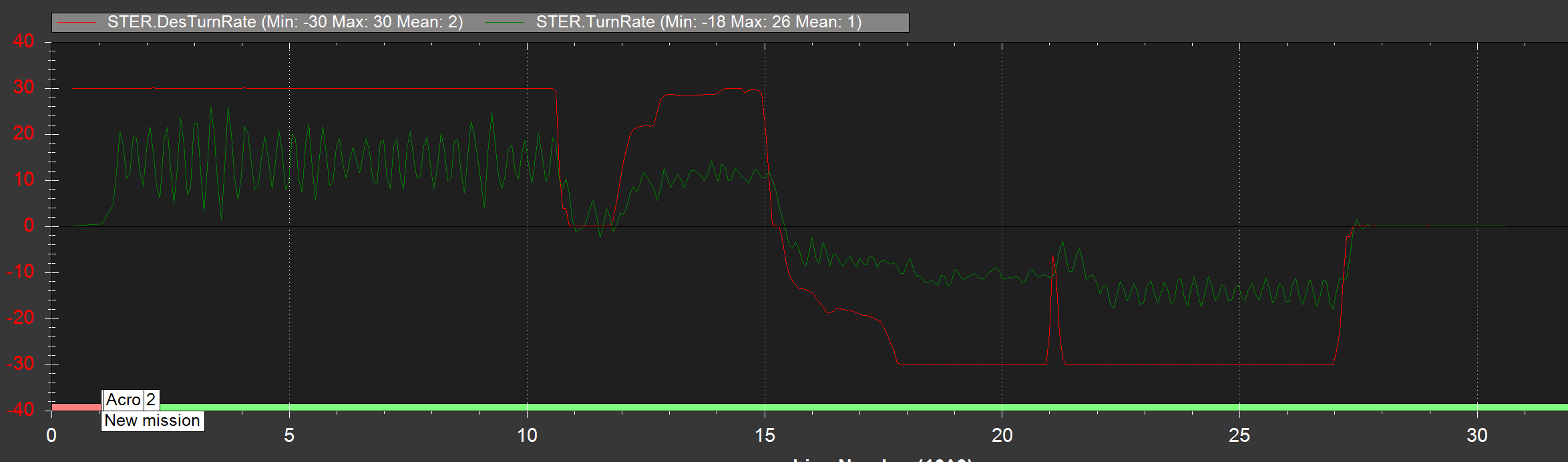
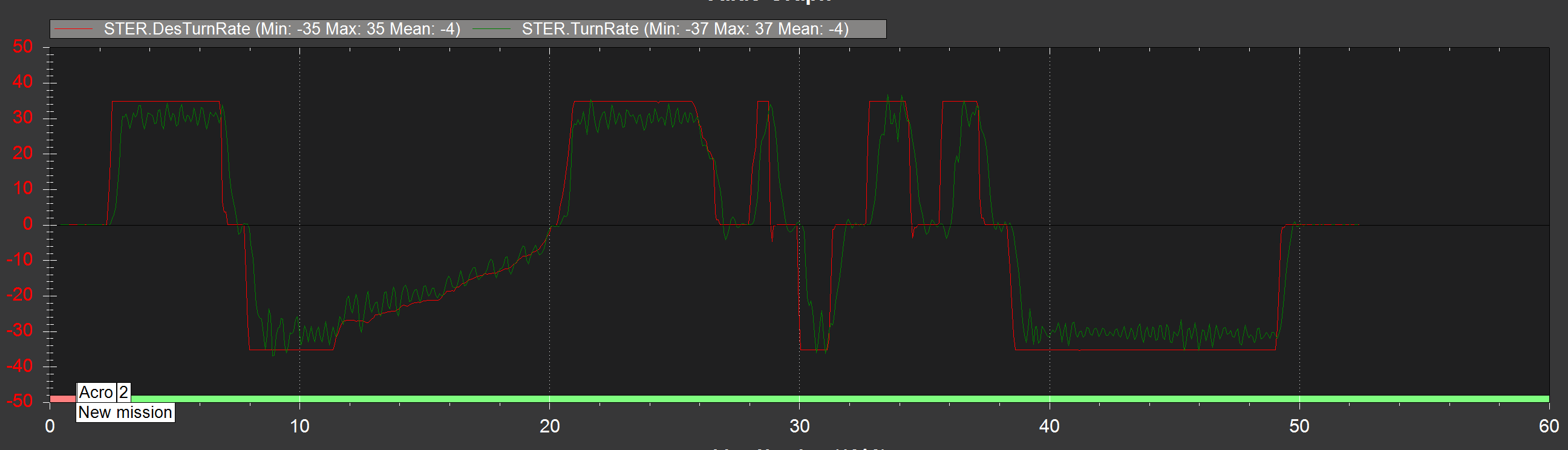
and my rover is doing something crazy like this when try to hit the way points and weaving all over the place
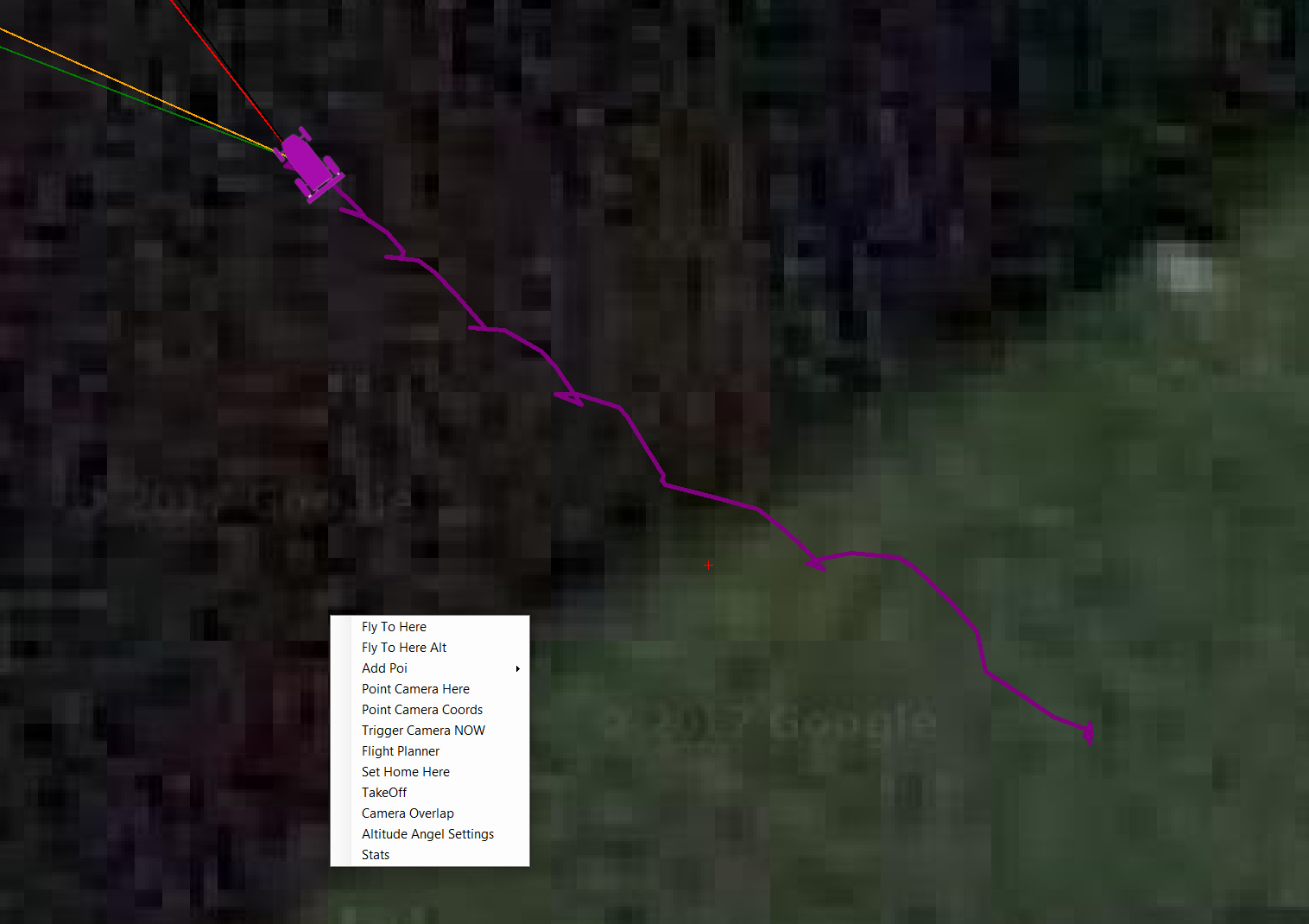
I also noticed that even though in my flight planner panel the waypoints look smooth. In my Flight data panel mission planner the waypoints look like this. It looks as if some of the way points were rounded off and are stacked near each other.

My skid steer platform is quite slow. maximum speed is approx 0.35 to 0.4 m/s and weighs close to 90 Kg.
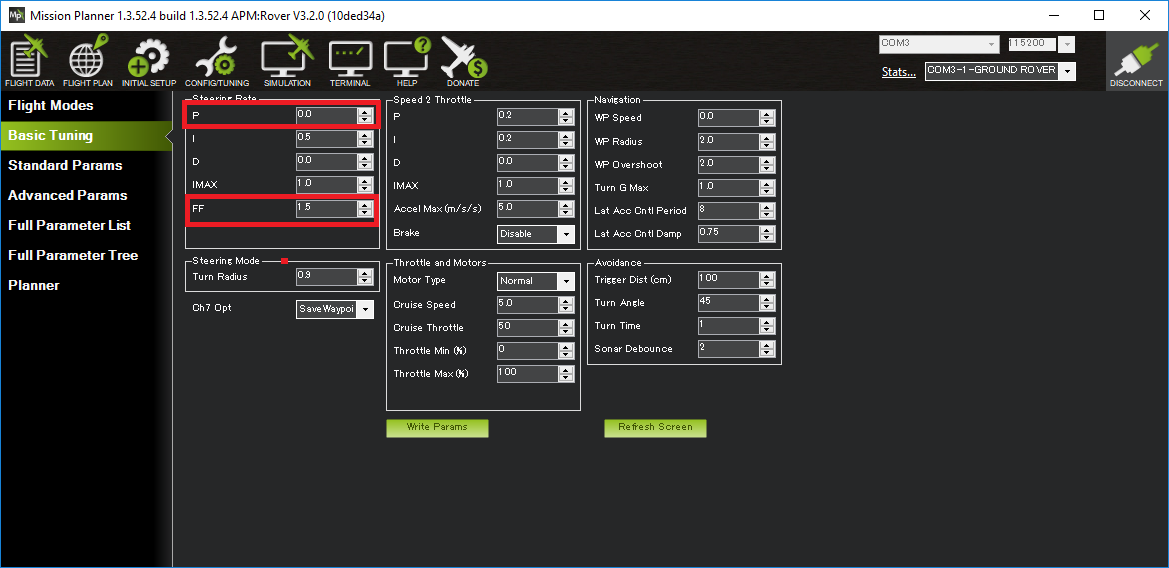
Currenlty I set the cruise speed to 0.35 with cruise throttle at 100 %
I keep seeing reference to STEER2SRV_P - is this now called TURN_RADIUS? – for a skid steer system wouldn’t this be zero?
In my config I just put a really low number 0.1.
Also what are the equivalent variables for the following
STEER2SRV_TCONST, STEER2SRV_I, STEER2SRV_D and STEER2SRV_IMAX.
the documentation seems out of date and tailored towards ackerman steering vehicles
http://ardupilot.org/rover/docs/tuning-steering-and-navigation-for-a-rover.html
Also because my robot is heavy and very slow can I turn up the
TURN_MAX_G to the maximum value (10). There is no way my robot can skid or roll. How does this value affect my the controller?
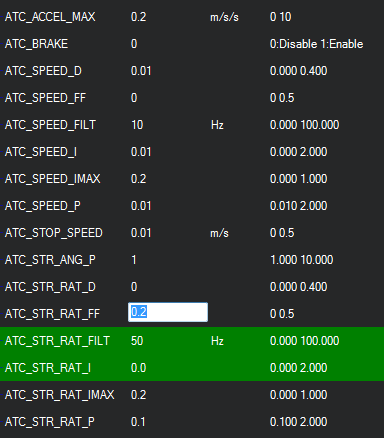
Below are a subset of my parameters
ATC_ACCEL_MAX,0
ATC_BRAKE,0
ATC_SPEED_D,0
ATC_SPEED_FF,0
ATC_SPEED_FILT,5
ATC_SPEED_I,0.2
ATC_SPEED_IMAX,1
ATC_SPEED_P,1
ATC_STOP_SPEED,0.1
ATC_STR_ANG_P,2
ATC_STR_RAT_D,1
ATC_STR_RAT_FF,0
ATC_STR_RAT_FILT,5
ATC_STR_RAT_I,2
ATC_STR_RAT_IMAX,1
ATC_STR_RAT_P,0.5
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_DEC,0.2100157
COMPASS_DEV_ID,393730
COMPASS_DEV_ID2,262402
COMPASS_DEV_ID3,466441
COMPASS_EXTERN2,0
COMPASS_EXTERN3,1
COMPASS_EXTERNAL,0
COMPASS_LEARN,0
COMPASS_OFS3_X,-19.80848
COMPASS_OFS3_Y,23.99739
COMPASS_OFS3_Z,-107.0519
COMPASS_ORIENT,0
COMPASS_ORIENT2,0
COMPASS_ORIENT3,8
COMPASS_PRIMARY,2
COMPASS_TYPEMASK,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,1
CRUISE_SPEED,0.35
CRUISE_THROTTLE,100
MAG_ENABLE,1
MOT_PWM_FREQ,1
MOT_PWM_TYPE,0
MOT_SAFE_DISARM,0
MOT_SKID_FRIC,100
MOT_SLEWRATE,100
MOT_THR_MAX,100
MOT_THR_MIN,0
NAVL1_DAMPING,0.95
NAVL1_PERIOD,2
NAVL1_XTRACK_I,0.05
PIVOT_TURN_ANGLE,45
RCMAP_PITCH,1
RCMAP_ROLL,2
RCMAP_THROTTLE,3
RCMAP_YAW,4
SKID_STEER_IN,0
SPEED_TURN_GAIN,40
TELEM_DELAY,0
TURN_MAX_G,10
TURN_RADIUS,0.1
WP_OVERSHOOT,0.5
WP_RADIUS,0.2