Sorry, you’re right, I was looking at the wrong log somehow.
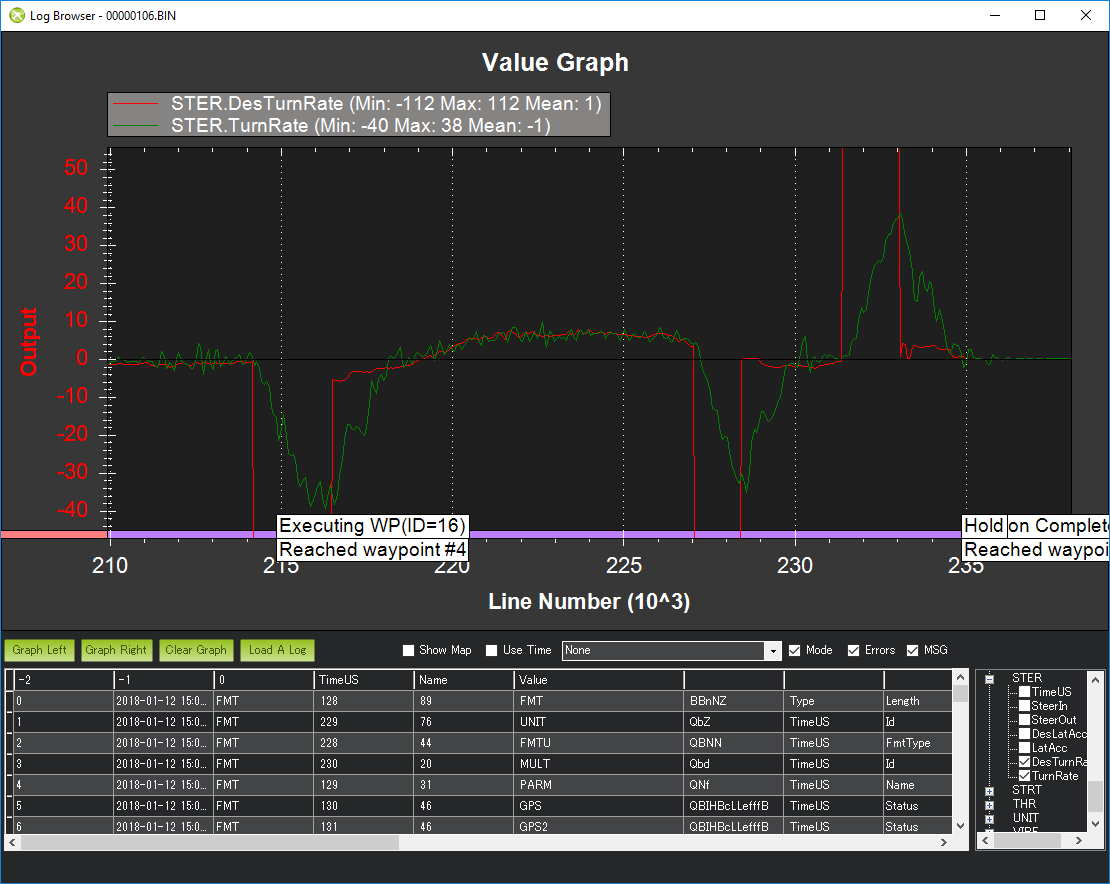
In this 106.BIN log, the turn-rate control looks quite good except for the pivot turns which are, as mentioned above and in a few other places, not great because of the ham fisted way we do the pivots. The current method jams the TURN_MAX_G value into the controllers which often leads to overshoot.
You could try turning off the pivot turns (set PIVOT_TURN_ANGLE to zero) and then tune it as best you can and then re-enable the pivot turns. At some point we will improve the pivot control but I can’t make a promise of exactly when that will happen.
Reducing the TURN_MAX_G value to 0.02 should also be possible and might help a bit.
Is there a way I can fine tune the EKF params so that it is better suited to the Reach RTK GPS I am using?
I’m assuming the current param are tailored towards standard GPS.
Eventually, I want to blend the onboard GPS on the Navio board with the Reach RTK GPS but first I would like to tune the EKF to get a good position solution with the RTK GPS. What params can I tweak?
If I get a good RTK fix I would like the EKF to put more weighting on the GPS positions.
I’m assuming blending the 2 GPSs (NEO-M8N (Navio2 - standard GPS) and the NEO-M8T (Reach RTK) ) will not be a problem?
Do you mean tuning the NAV1 params in auto mode with pivot turn off or something else?
Yes. I think this could be a good idea in this situation to separate the known issues with the pivot turns (which we cannot fix without code changes) and tuning the vehicle. I.e. pivots turns are messy, let’s turn those off and get the vehicle tuned as best as we can.
Re EKF tuning, in general it’s not needed. Even for cases of using RTK GPSs I’ve never heard that re-tuning the EKF is necessary. We have some information on our EKF page here. I’m not the EKF expert but it seems like modifying the _NSE parameters changes the weighting between sensors.
The problem with not pivot turn is that, in my case, I could get 1m/sec top speed with my ASV. So I use 0.5m/seg as cruise speed, that gives a little power to make turns. So, there is no way to make a turn with a little radius. Going forward and turn at the same time need a lot of space. The river where I test, measure 10mts from coast to coast, my ASV can’t make a 180º turn in that space. The only solution I think of is lowering cruise speed. But there is a river flow I need to beat… pivot turn is a must for this kind of robots, I think.
I will try it next week and will see what happens
I was not able to set the turn_max_g setting to 0.02 and getting the result that I want.
there are 2 issues.
MP does not allow me to set any value less than 0.2.
I tried the Qgroundcontrol trick as I have done previously. When I set the value to 0.02 it gave a warning . but proceeded to make the change anyways. I switched back to MP to confrim that 0.02 was the new turn max g setting .
When I ran the mission i noticed that now the commanded lateral acceleration is ± 10 instead of ±2 …did this mean that the controller had assumed the turn max g was set to 0 instead of 0.02?
Can you confirm if this is a bug?
Also tried turning off the pivot turn but didn’t spend too much time on it … the course location where I was doing the testing was too small and the platform was too large for me to get any sensible result as the platform was overcorrecting at every turn. Need to find a large space to test this.