I’m looking to set up my racing boat with a flight controller. I am concerned the parameter NAVL1_PERIOD only allows 1 s increments.
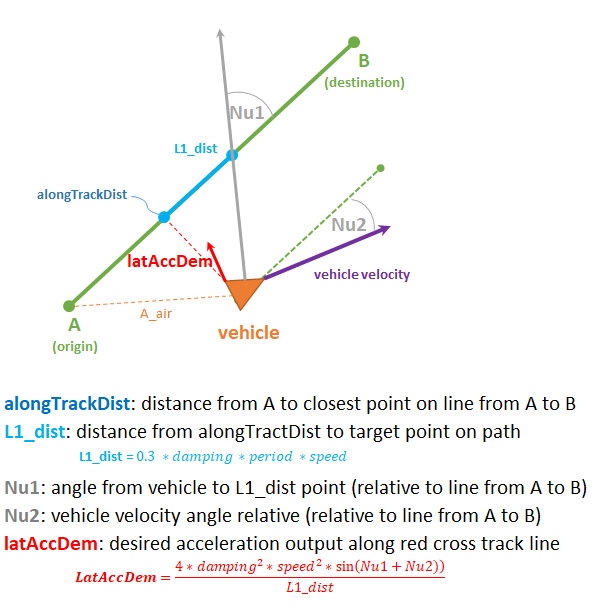
If I understand the algorithm correctly, distance L1 in part determines the desired lateral acceleration. If L1_dist is much longer than the entire distance between waypoints, wouldn’t that cause Nu1 and Nu2 to be very acute, and the resulting latAccDem be very noisy?
A typical maneuver for the boat is a 180° turn in 1.1 s to 1.4 s. Sometimes it is even quicker. That means it would go through 3 to 5 waypoints in that time. That means ~0.2 s between waypoints. The notes mention typical NAVL1_PERIOD values of 20 s. That seems far too long. That means L1_dist is 100 times longer than the distance between waypoints. Indeed that’s more time than two whole laps on my course!
Should I be worried? Will I need NAVL1_PERIOD to be a fraction of 1 s?
The video below gives an idea of the typical turning rate of the boat. I am of course controlling it manually.
I agree that a NAVL1_PERIOD of 20seconds is far too long but, despite the notes, rover/boat defaults to 8. I’ve used values as low as 6. The parameter description has the “increment” set to “1” but it’s actually possible to input decimal points using the full parameter list screen in the ground station.
I don’t think we’ve ever had someone test ArduPilot Rover/Boat at the speeds shown in the video but I think it will work and if it doesn’t I’m happy to help resolve any issues.
Very exciting, I’m really looking forward to seeing some videos of autonomous missions at 50+ km/h!
It is interesting to compare autonomous missions on boat and car. The boat can reach constantly higher speeds, as would the car in a wide and obstacle free parking lot.
It would be nice to inspect a boat log:
-Satellites (video indicates wide open sky).
-Fit to the waypoints trajectory, trying also not oval trajectories, such as an eight with four points.
-Speed, particularly different speeds. Here is the different fit of the car on the small circuit above at 1.3m/s and at 1.6m/s (which was too much, as comparing both images show).
{kind=link}
{kind=link}
{kind=link}
{kind=link}