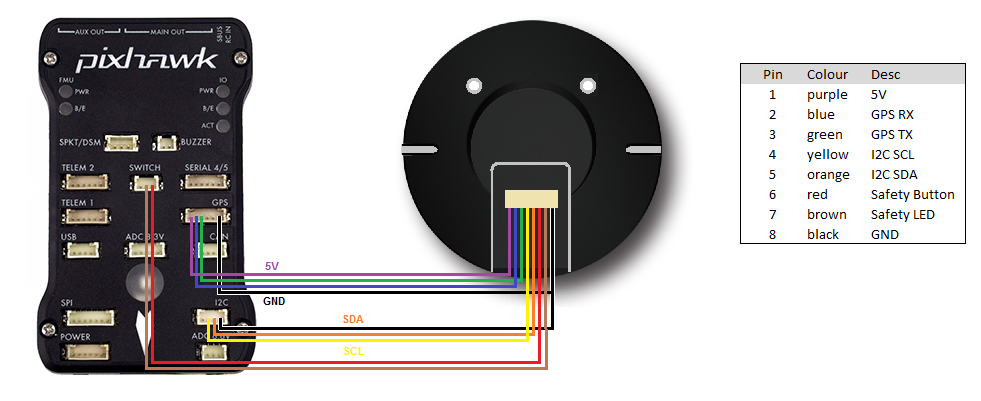
I want to use the Here 2 for the compass/direction for the movement tracking of the rover. So im wondering if I would need to divide the wiring of the Here 2 to go into the i2C port of the Pixhawk 2.1 like the image below or are the wires already setup in GPS1 port to do that as standard?
Why would you do that? You said you have CAN working. It should already be using the compass on the module on the CAN bus. The Barometer should show up as Baro2 also. How many compasses show up in Mission Planner on the HW ID screen?
I figured out how to make the Here 2 compass activate last night. That’s what I was trying to do and test wether it reacts to turns faster on MP.
Also I recalibrated the compasses last night. X & Y are all low but the Z axis are coming up very high. In the 200’s. The ESC was off so no interference from that. Not sure what it could be
Is it less than 600 total?
These are the offsets on my Here GNSS compass. I have had this unit on a multirotor and now on the Rover and they have always been in this range. It works fine. There are 2 other compass’s on the PixRacer flight controller that I disable.
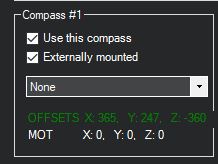
Not sure why I thought the best result was closest to Zero. Well it’s showing your results as green so that’s always a good sign. Does it matter wether it’s in the + or -?
Also the guy from 3DXR said that I should tick all three compasses but have the first compass marked as externally mounted. Does this sound right to you David?
That’s true. Ironically the best offsets on a compass I have ever had was on a $5 compass only board I bought on eBay mounted in a plastic puck on top of a quadcopter.
From what I understand if you are using the CAN interface the external compass is #3. There was a post from Proficnc about this recently. But it also said this would be addressed in a later version of firmware so I don’t know if it has been or not. You should be easily able to tell what compass is what from what I already mentioned from the HW ID page of Mission Planner. Check it out with the external compass connected, then disconnect and see what’s missing.
I’m now using it through i2C and have recalibrated it all again. Seems to have some decent results regarding the offsets and now which are all in the green and when I move the Here 2 on its own it’s direction rotates on MP so it all seems to be ok.
Also has a fast flashing green LED on Here 2 which means SBAS is working. Around 1.4 HDOP so it’s reasonable seeing as I’m in my house at the moment.
It means nothing that it shows rotation in Mission Planner when moving only the compass. This has been explained several times by some of us in this thread. The HDOP indicated in your house also means nothing even if 1.4 was good. Which it isn’t. Do you understand what Horizontal Dilution of Precision means?
The Here 2 has an IMU build in, so rotating it does not only rotate the compass.
I know you guys have mentioned this several times I’m obviously confused with the dynamics of what each thing does or doesn’t do.
On a good note I tested the rover last night and it worked very well.
Its to do with PDOP or HDOP I think and also is there a way to improve HDOP/PDOP or is it purely based on conditions when the rover is used & now visible the satellites are?
Like I said before on the cheap GPS module I had HDOP was 0.6. On the Here 2 it’s never gone below 1.1. Is there a way to improve this other than improving where you are to increase visible satellites? Both gps modules have been tried in the same conditions so I’m not sure how the Here 2 is showing a higher HDOP value compared to my other gps module
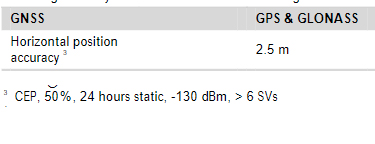
The attached is the basic horizontal positional accuracy of the uBlox M8N chip. I have always assumed that with an HDOP of 1 this would be the expected positional accuracy of these GPS units. CEP is statistical meaning that 50% of the positional reading over a 24hr time period with >6 sats visible will be within a 2.5m circle. So some will be better and some will be worse. If you need significantly better accuracy than that then you will need to shell out more money for a better system.
It’s water under the bridge now but what you should have done is define what you wanted to accomplish 1st, research or ask for advice about how it can be achieved and then buy hardware.
Thanks for the info. Is there a better gps module I could grab? I don’t want to use RTK as I want to avoid having a base station. I did see a YouTube video of a gps gnss module claiming 1cm accuracy but is this even possible & if so how much is something like this?
I think you will need RTK but maybe you could use a Fixed Base Station service rather than your own. I actually looked in to this a few years ago and got as far as locating the closest Leica network antenna about 5km away at a local airport. The technical details of getting this to work was way beyond my mild interest.
There are pay services used for farming and other activities.Maybe there are free ones available to you. A quick Google search of “rtk base stations uk” turned up some interesting information.
Near any of these places?
Daresbury, Inverness, Shoeburyness.
Check out this post. It’s what he is using in NZ:
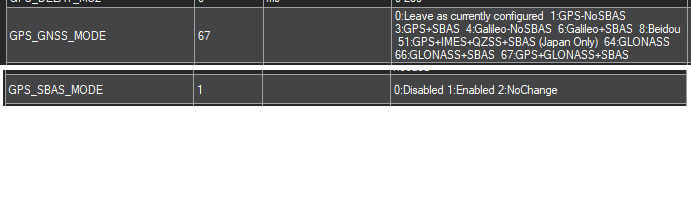
I have the gnss mode already on 67 and have now changed the SBAS to 1. Thank you
Also I need to take my rover out into an open field and run some decent tests. Right now it’s all been in my back garden surrounded by bushes, trees & houses hence why the HDOP is poor.
I’ve been told that even the house windows are an issue due to signals reflecting off of them and confusing positioning of the rover.
So I will do that when I have some time.
Also I will take the rover to the car park & run a waypoint along a straight line & see if the tuning is spot on as that may also be an issue.
Another thing I’ve noticed is that the left motors move slightly stronger than the right motors. In servo control they are both set to the centre which is above 1500 because when it’s on 1500 it still moves. So I’ve put that up to 1650 and both sides of the motors are not moving.
I will soon be hooking up a raspberry pi to the Pixhawk via telemetry. Wanted to know if there’s a way to view battery 2 via telemetry instead of Battery 1? Thank you
View in thew GCS? If so sure, just select the battery 2 values you want to monitor from the User Items menu and they will show up in the HUD.
what are the plans for the Pi?