As promised in this discussion, I have done a simple comparison between a cheap single frequency RTK system and the ubiquitous Ublox M8N. This previous discussion centres around whether or not there is any real word advantage to be had from using the newly available cheap RTK GPS systems with our autonomous vehicles. The RTK unit used here is the 5Hz version of the NS-HP-GL from Navspark which together with the active dual band antenna comes in at $125 USD. The M8N is from CSG Shop and comes with an integrated Taoglas antenna and currently sells for $72.99 USD. The purpose of the test was not to verify the accuracy claims of the RTK receiver but rather to see, if in something approaching normal use, there is any distinct advantage. For this comparison I elected to use both GPS units configured for simultaneous use on my rover and manually drive around a pre-marked course repeatedly over a number of successive days. I have used the perimeter markings of a local football field for this purpose.

The RTK receiver gets its corrections via an NTRIP client running on an ESP32 board using a WiFi internet connection from a hot-spot set up on the phone in my pocket. The base station information can be found here. The baseline for this test was ~3.2km. A ‘FIX’ solution was obtained approx 2 minutes after start up before commencing the test and was maintained through out. Both GPS receivers are mounted at the front of the rover approx 5cm either side of the centre line of the vehicle.
The test procedure included manually guiding the rover around the perimeter of the football field at walking pace (~1m/s) in an anti-clockwise direction starting from the SE corner. I followed behind the rover at a distance of ~3m. I managed to keep the perimeter line I was following within the two front wheels at all times. This equates to a maximum of 15cm cross track error. This procedure was repeated on each of three consecutive days.
The M8N maintained a ‘DGPS’ solution through out and was using 18-19 satellites. The reported HDOP was 0.59-0.61. The RTK system mantained a ‘FIX’ solution through out and was using 15-16 satellites. The reported HDOP was 0.6-0.7. Notibly, the M8N typically reports a better HDOP compared to the RTK system.
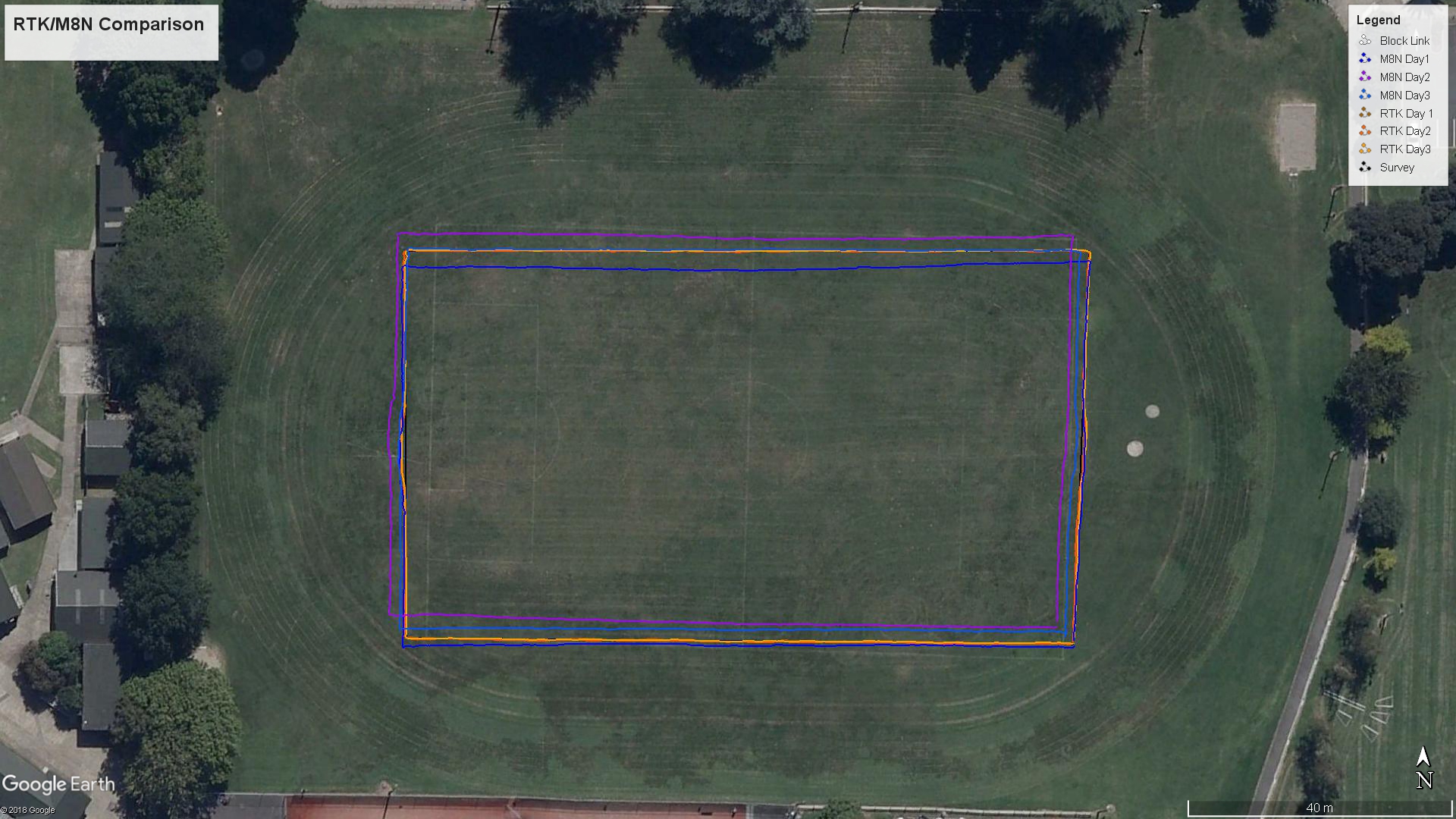
After downloading the results from the initial test run, I was faced with an obvious anomaly in the shape of the football field that the rover traced out. This prompted me to return to the field and accurately measure the location of the 4 corners using proper survey equipment. Using local survey marks as a control, I established the location of these corners with an absolute accuracy better than 5cm. These form the polygon marked ‘Survey’ in the KMZ file and represent the real world intended track (shown in black). Surprisingly, although the two short ends of the field come in close to being the same, the long sides are almost 3m different in length. The discrepancy is not so obvious from ground level. Perhaps not so surprising since this is a practice field maintained by the adjacent high school. Also worth mentioning is the discrepancy between the ground coordinates and the Google map image. I have found this type of error typical and consequently never rely on GM to determine locations at this scale.
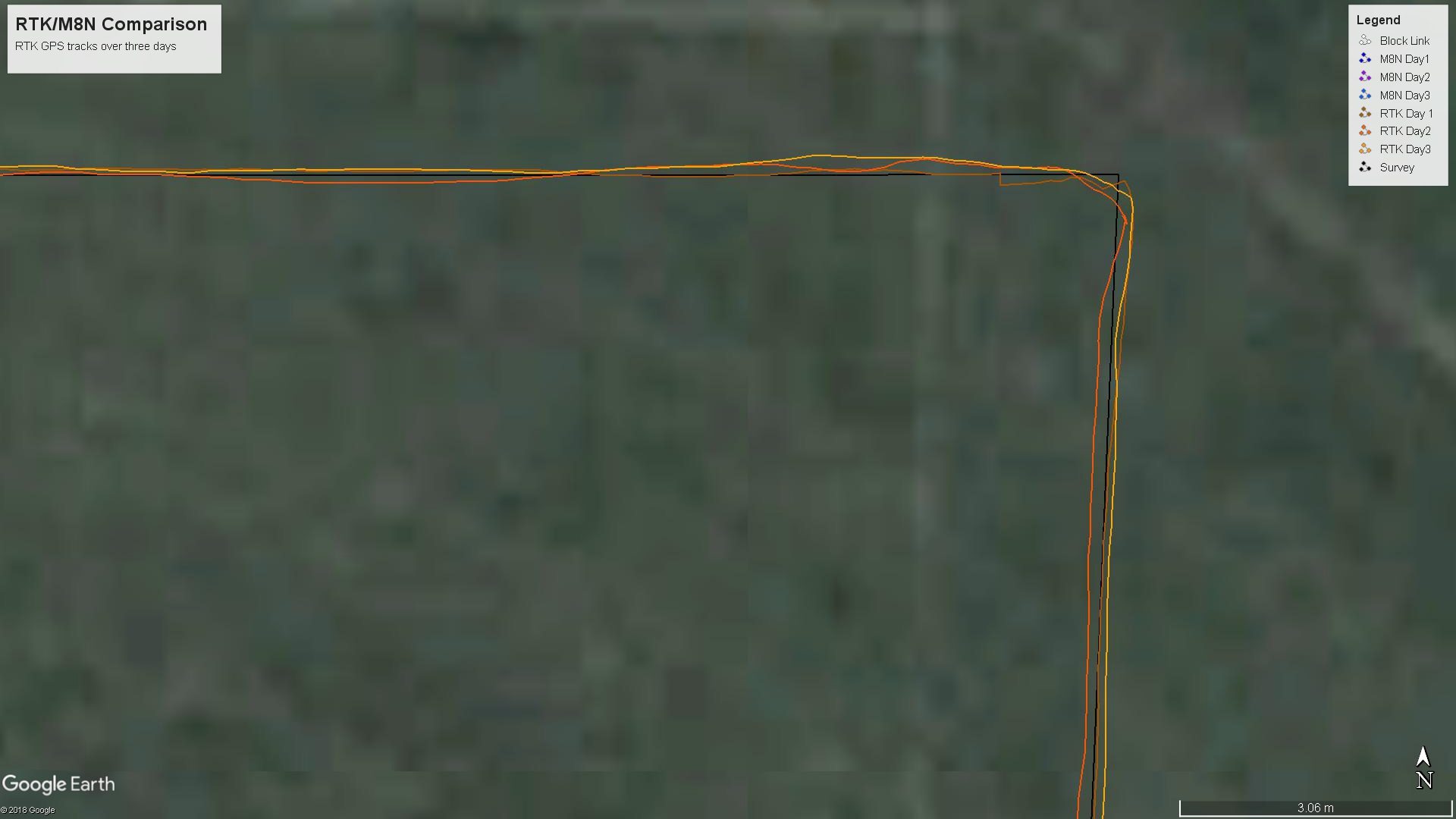
The results of the tests over 3 days show a high degree of consistency between the RTK positions and the route established by recognised survey methods. It is obvious that the accuracy of the RTK position is better than the accuracy of my piloting ability.

Zoomed to better show track accuracy:
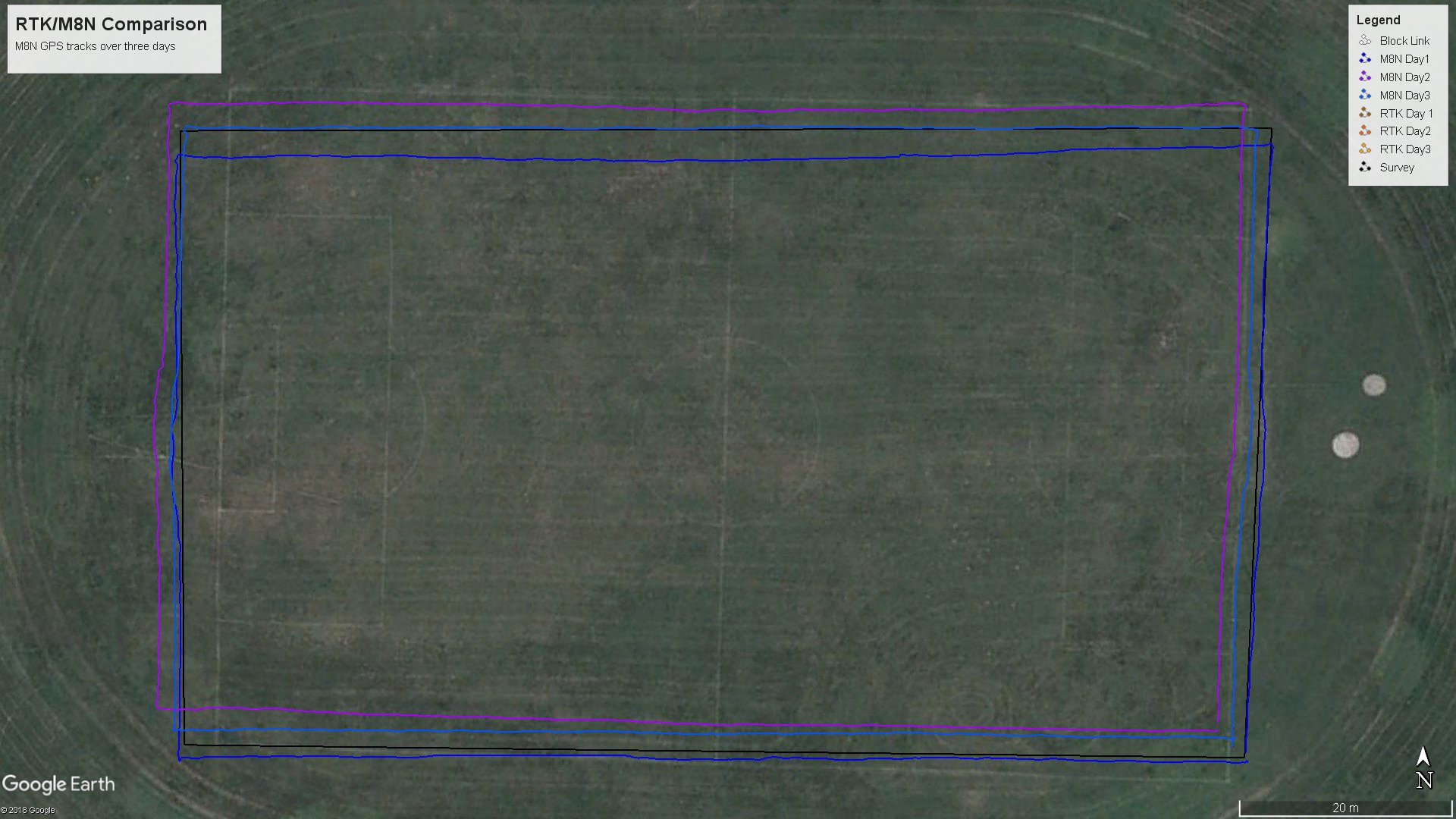
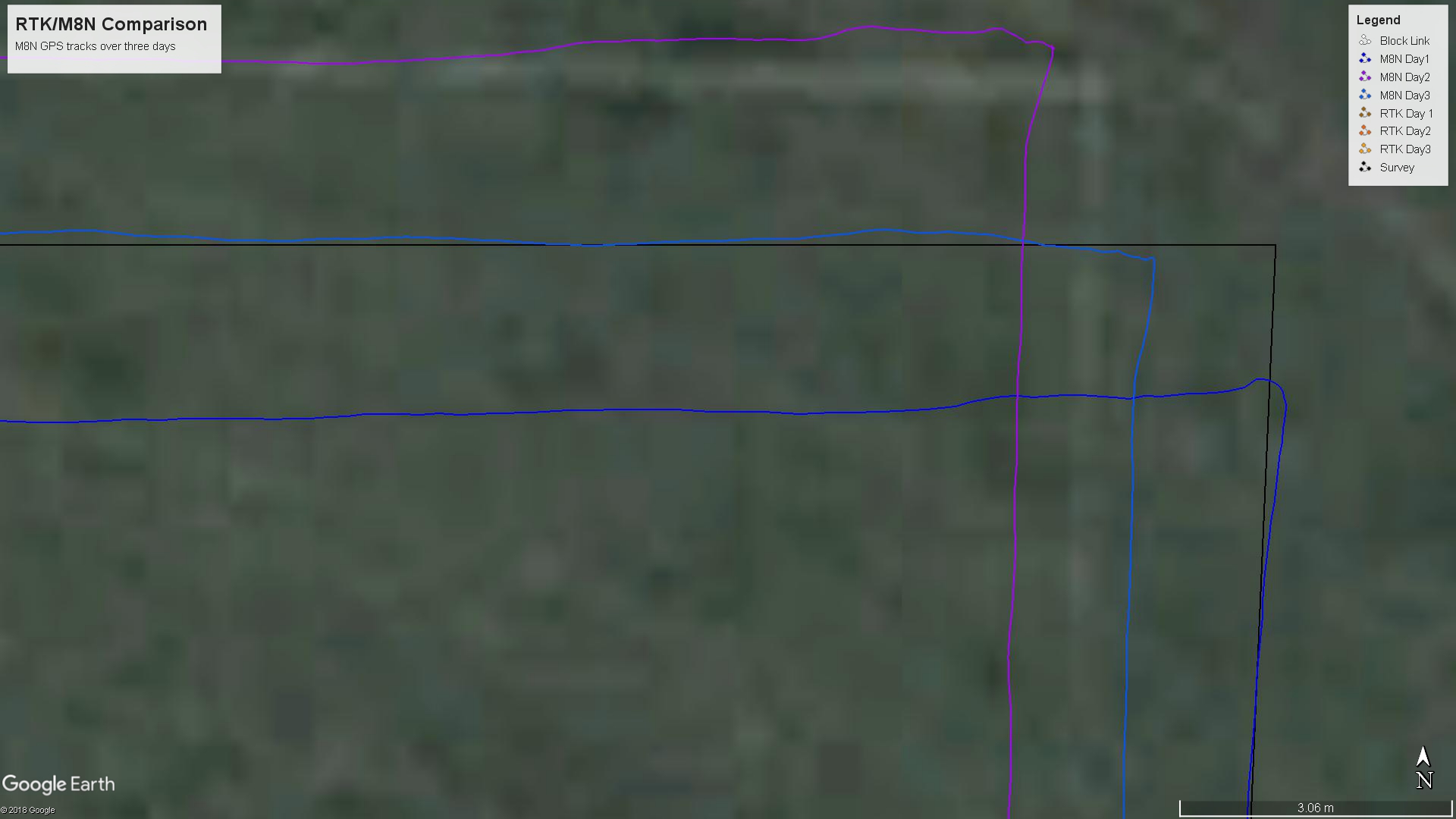
The M8N did not fair so well with significant deviation from the intended track along with significant deviation day by day. Based on simple screen measurements, the maximum cross track error comes in at well over 3m and the total range of error is around 5m. I will calculate the actual cross track error mean and max for each GPS/day and present it in a day or so.
Same zoom level/location as previous:
For my use, I am very happy with the increased level of accuracy I get for the additional ~$50 I have spent on my RTK system. In fact, it is this accuracy that makes my particular application viable…