Red to Pin 2 and black to Pin 3 on that connector. The Gnd is not classed as Pin 16. These pin designations (2,3,13,14,15) are virtual pin numbers assigned in firmware to hardware inputs. This will mean nothing to you.
Hi Dave,
I have tried every option for getting the voltage/current measurements via ADC 3.3v & ADC 6.6v and both have been unsuccessful in giving me any readings. I made sure the pins wiring are correct & settings in MP are set according to your instructions but still no luck on my end.
I know you said you tried with a battery and the info showed up as you expected. Maybe the ports required on my pix aren’t working? But I doubt that would be the case especially for both ports that I’ve tried.
Also I tried again using the old apm and the data showed up just fine. I wired up both red and black wires and the voltage and current are all there. Here’s where I wired the red & black wires to on the apm:

Just need to get this working on the pixhawk like it does with the apm
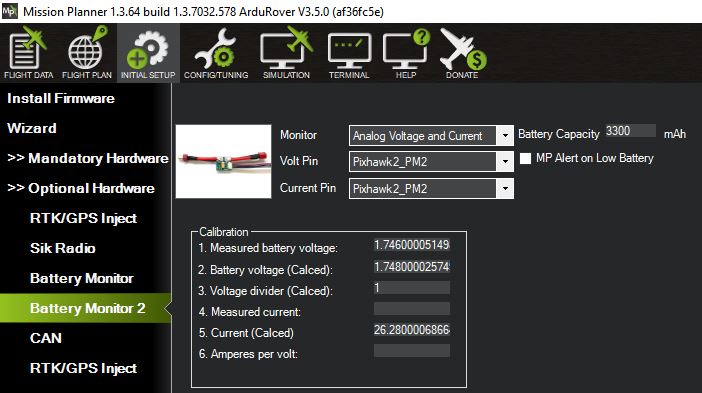
Yes it works fine. Configured as per the attached and voltage applied to the red (+) and black (gnd) of the ADC3.3V connector as shown You are not measuring current with that setup. That input labeled “Current” is just another voltage input. You would need a current shunt or other current-voltage device (hall effect, etc.) to actually measure current. You have 2 voltage inputs scaled differently which does nothing.
I don’t know why it doesn’t work for you. What did you measure as output and what did you measure it with?

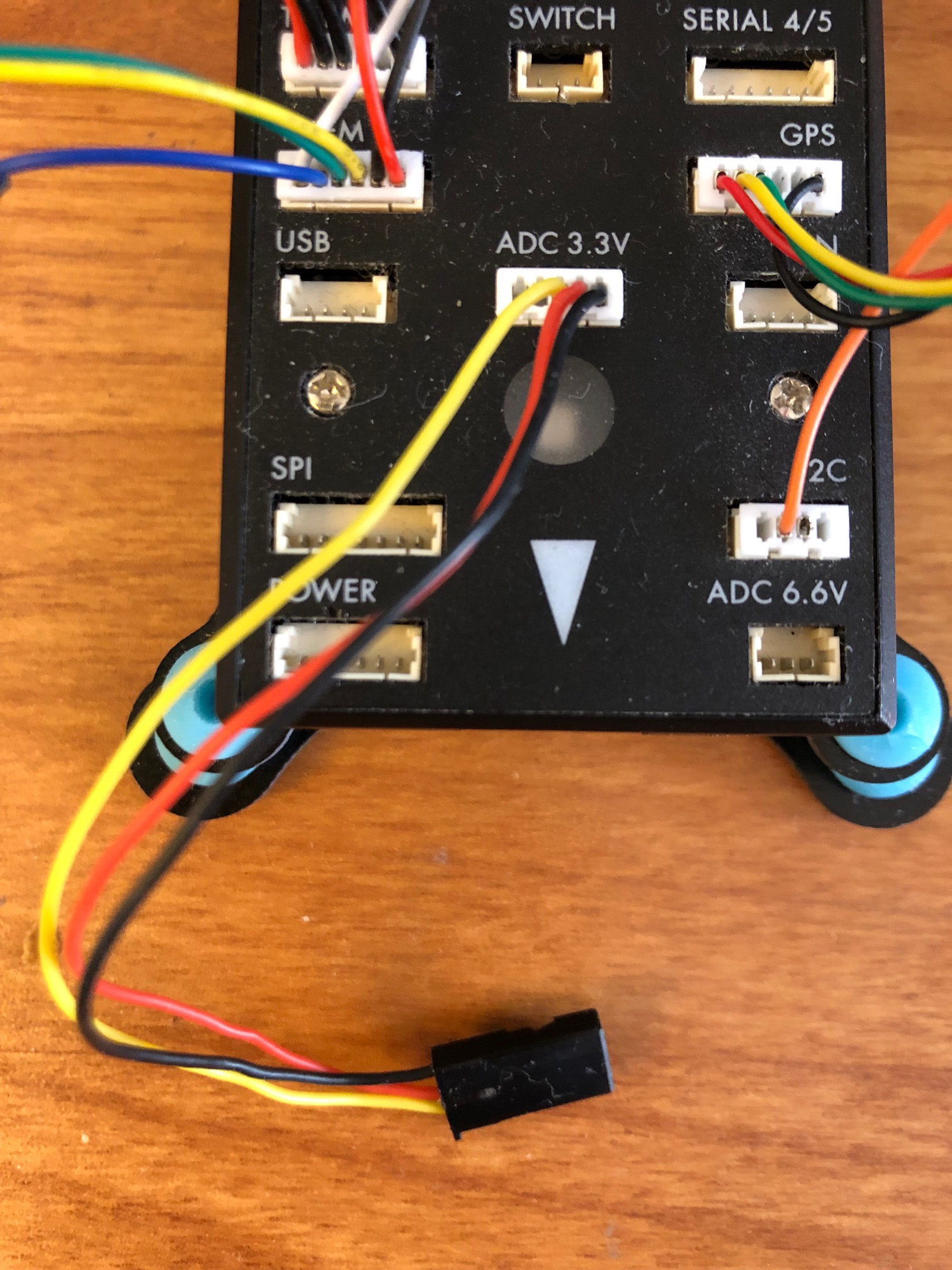
Thanks for posting the pics for me, looking at the pic you posted I didn’t wire it correctly at all.
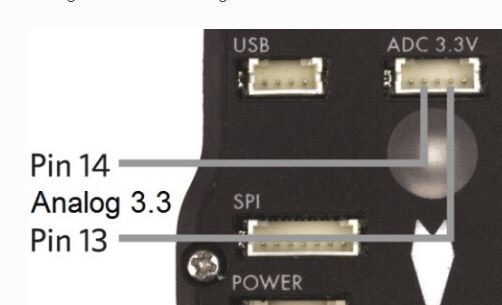
I wired the red into pin 14 & black into pin 13 on ADC 3.3v.
Tonight I will wire it like your picture and it should be ok🙏🏼
I don’t know how you could have possibly gotten that wrong on the ADC6.6V connector, I told you exactly which pins to use from the table that you posted. But anyway try it with the ADC3.3V connector wired correctly which should act the same as the APM input.
What did you measure for output and what did you measure it with?
I didn’t measure it as I couldn’t find the device to do it. I will have to buy another one from amazon again but it wasn’t expensive.
I hope it works tonight once I try. I’m very grateful for your advice and patience
OK. I’m not sure what you had but you want a Multimeter at a minimum. You can find one for ~$20. Every RC hobbyist needs at least that.
I had this one:

There’s another one which has an oscilloscope that you mentioned. Should I buy this instead or buy the same as I had before?
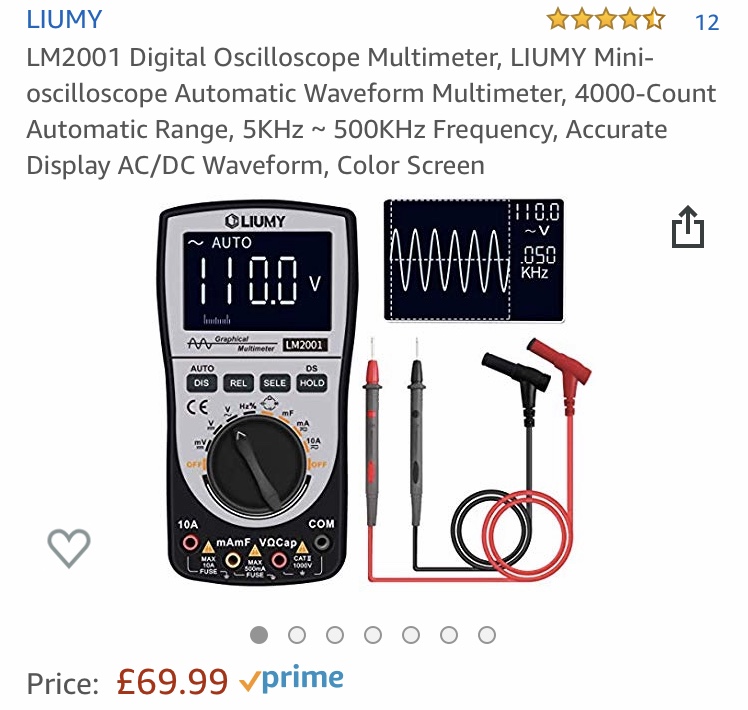
I would want to know what kind of signal is being produced from that sensor but I’m not sure I would recommend that scope meter and one that would be fully functional as a scope would be too expensive for what you are doing IMO. Maybe the cheap multi meter will be good enough. If the signal worked to your satisfaction with the APM then I suppose it will work on the Pixhawk as they are essentially the same analog inputs.
Maybe you could look up a local amateur radio club and ask if someone could scope the unit for you  Those guys would typically have an O-scope. I have one!
Those guys would typically have an O-scope. I have one!
1 Like
Hey all. It’s been a while but I’ve still been busy and working on my rover. I’m now the proud owner of the Pixhawk 2.1 Cube with the Here 2 GNSS Module. I setup the Here 2 using the following parameters in SLCan Mode CAN1:
CAN_D1_PROTOCOL:1
CAN_D2_PROTOCOL:1
CAN_P1_DRIVER:1
CAN_P2_DRIVER:1
GPS_TYPE:9
NTF_LED_TYPES:231
I also tried changing BARO_ENABLE as 1 to use the Here GPS as the Barometer instead of the Pixhawk but when I move the Here GPS it doesn’t turn on MP. So I was wondering if successfully setting the Here GPS as the Barometer might help the accuracy?
I have been running some accuracy tests with GPS but it’s still moving so much even when stationary. I have tried with i2C & CAN and both aren’t more accurate than the setup I had previously when blending 2 cheap SE100 GPS modules that I purchased off amazon and using the older Pixhawk 2.4.8.
I was expecting more improvement with GPS positioning especially after spending over £300 to be met with similar GPS results like what I had before. Maybe some parameters can be changed to improve things?
On i2C mode the HDOP is around 1.2 & on CAN it’s 0.00 which I thought was odd. Any advice & tips as always is appreciated.
Expecting a lot better positional accuracy w/o RTK is unrealistic. A $100 GPS module alone will not get you there.
A Baro on a Rover is of little value and I doubt an external barometer will be much, if any, improvement over the internal unit in any case.
No HDOP has been reported by others, haven’t seen a fix yet.
You are still using ardurover, are you not?
A barometer is a device to meassure atmospheric pressure. It does nothing to improve positional accuracy, since a rover is only moving in 2 dimensions.
And as others and I wrote before, moving the GPS/magnetometer alone will not move the HUD in Missionplanner, because gyro, accelerometer, GPS and magnetometer are all contributing to a different degree to the position estimation the EKF filter is calculating. So moving one part will cause the EKF to drop the readings from that sensor, because it does not match what the other sensors are reporting.
I wasn’t expecting RTK precision without an RTK unit but considering the Here GPS used GPS, GLONAS & a few other satellite systems slightly better than what I had before was expected but it’s basically the same.
Maybe the Here 2 GPS Module is only using one specific satellite system like GPS rather than all of the other satellite systems combined? Or does it use all of them as a standard default setting? Is there a way to check?
Thanks for explaining. What would you recommend to help improve the accuracy? Like I mentioned I purchased the Cube & Here 2 recently. Before I had Pixhawk 2.4.8 & cheap GPS module & the accuracy is The Same
So now I’m wondering why I purchased all this for the exact same result
The Cube will do nothing for you in this regard so you could have stuck with the Pixhawk. The Here2 is just a higher quality module and maybe it will collect a few more satellites (or not) due to a better antenna and maybe higher sensitivity but that’s not going to make a huge difference from the cheap units, it’s still meter accuracy. And all the other stuff on that module (IMU, baro) will do nothing for you.
So I’ve just spent over £300 on hardware that will do nothing for me. That really made me laugh😂
I don’t have a Cube but if I was building an aircraft of some value or carrying equipment with high value I would use a Cube. For everything else I have flying or rolling (no boat yet) I use Pixhawks, F4 and F7 boards in the $30-$50 range. Piloting a Rover is no stretch for a Flight Controller.
I read this and wanted your opinion:
He talks about implement PPP yourself so I was wondering how that is done?
Why do you need higher accuracy? I scanned the thread, but did not find you mentioning it?