You can’t do that. The Grid is created with dependencies and a drive path. If you were able to manage to paste a duplicate of one grid next to another (not a feature) you would have to edit many, many waypoints to make a contiguous larger grid. That would be more effort than just creating the larger grid in the 1st place.
Understood. Only option now is to get myself a skid steer rover. I’d like to purchase the Sabertooth 12A motor controller and a set of decent motors. Which motors could you recommend me? I guess for now I will start with 2 motors at the front & then get the other 2 motors for the rear of the rover later on
Assuming you will be driving the wheels directly with the motor and the tires are ~115mm diameter and a typical mission speed is the 0.5 m/s you stated earlier a planetary gearmotor with a ~250-300RPM No-load speed would do. I would add encoders but you don’t have to. Something like these for example:
https://www.servocity.com/280-rpm-premium-planetary-gear-motor-w-encoder
https://www.servocity.com/280-rpm-premium-planetary-gear-motor
If you are only driving the front wheels the rear wheel will need to freely pivot like a caster.
Thank you will definitely be looking into purchasing these and will use 4 motors in total. What are the encoders used for? Are they a separate item I will need to purchase?
Ardurover supports encoders as another input for positional data in addition to GPS. In fact by dead-reckoning you can pilot a Rover w/o GPS for some applications. You don’t really need it but if I was building a skid steer Rover from scratch I would include them. I just like experimenting with available technology.
BTW-I had suggested obstacle avoidance as a possible solution to your problem but I just learned that the Dodge function (steer around obstacles) doesn’t really work in Rover. It will only stop the vehicle from running into something. I was going to try a Lidar unit until I learned this.
So do these motors come with encoders inside them or would I need to purchase them separately? Sorry I’m not familiar with this side of things yet so be prepared for more dumb ass questions from my end:
Edit: I’ve seen the encoders are part of the motor. With encoders will I still need the motor controller like the 12A Sabertooth?
i think you could get your current rover working, is it just the turning circle? Why not just do a bigger grid and discard the edge bits. Or keep the grid the same size and come back and go round the perimeter a couple of times after.
It would be much easier to just use it as a skid steer, should have done a setup like that from the beginning but I don’t mind spending £100-£200 for some decent motors
You definitely need a motor drive/esc. Encoders are just sensors.
I will purchase the Sabertooth 12A.
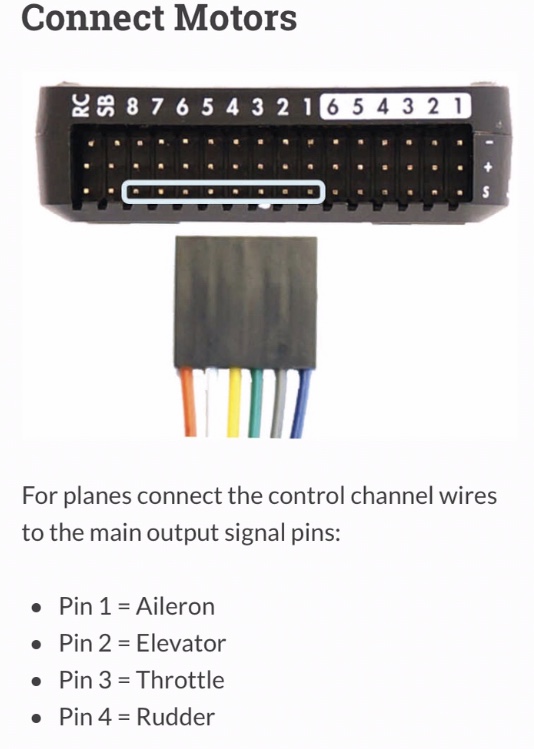
The cables that go into the pix are 3 pin. These look allot bigger. How would these connect to the pix?

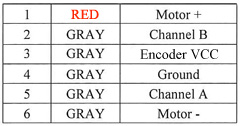
6 pin by the looks of them
So it works like this?
Or is this a better way? If so and I have 4 motors how do all 4 motors fit onto the pix when there’s only 3 pin rails?
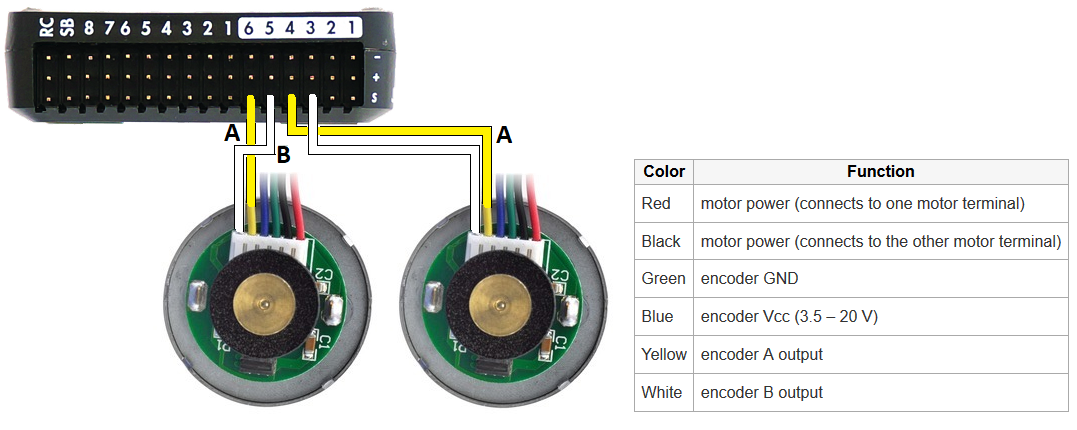
Mus, you are way off the reservation. First look at the link I posted for the motor with the encoder. The connector pinout will tell you what wires go to what function. Forget about just plugging in connectors to the Pixhawk with this build, you need to determine each function and build the right cables. Sorry man but there is no way you have read the reference material some of us have linked to in this thread to come up with that,
I can see this in the part about wiring but I don’t know what all that means. I thought there’s 2 wires that go into the Motor controller, one being Motor+ and the other Motor-
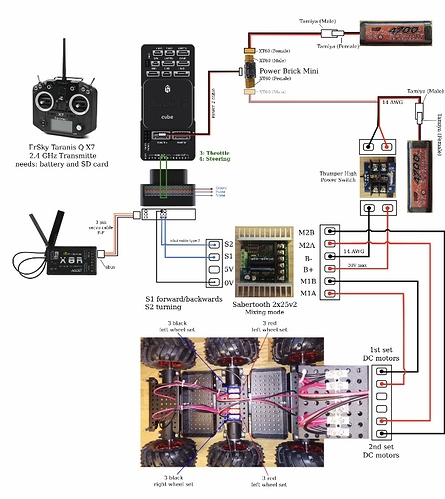
That connects to the motor controller and from the controller goes into the pix like the diagram I posted a few days ago:
I’m still trying to process “3 pin rails” after a month of Pixhawk discussion.
Mus,
You taught me something! I did not know you could select and move multiple waypoints at the same time in MP. I wrote a program to shift waypoints outside of MP because I didn’t know I could do that. Anyway, I think I have a way to do what you want to do if I understand what you want to do. I recorded a short video for you to demonstrate my program which is one way to do it along with Mission Planner, but honestly, doing it completely in Mission Planner is easier. So, I recorded a second video for the best way that you put me onto: https://youtu.be/_O0AvKEOMok. See this one for kicks if you feel like it for the hard way with my program I spent unnecessary time writing a while back: https://youtu.be/l5xNx5OMkFA.
The mouse pointer is not recorded in the right place in the videos but I think you can follow the action. I just got a new computer and haven’t installed my video editing software yet. I just installed a crude capture program that didn’t work quite right.
Kenny
2 Likes
What you’ve done on the YouTube video is EXACTLY what I was talking about. Thank you so much for showing that & please don’t delete as I’ve saved it to my favourites and will try this after work. Can you keep repeating the process over & over? Let’s say you want to create 4 duplicates can that be done by repeating the same process? Thanks again Kenny your the man!!
You absolutely can repeat as much as you like. With my Pixhawk, I am limited to about 500 waypoints before memory is full. I will leave the videos.
1 Like
With the limit on your pixhawk is that limited due to the SD card size? Or is it because of the processing power of the pix?
I don’t think it has anything to do with the SD card. It’s because of the amount of memory on the Pixhawk or the code I think. SD card is just for logging from what I understand.
That’s right. Even Flight Controller w/o an SD card will load and run a mission.