After WP1 Press the “Add Below” button and then from the pull-down menu select DO_SET_REVERSE and place a 1 in the 1st column for reverse. Until it see’s another DO_SET_REVERSE command it will continue running in reverse. So after WP2 place another DO command with a 0 in the 1st column to change it back to forward. Then after 3 place another DO command with a 1 in the 1st column to make it go backwards again.
So in summary place a DO_SET_REVERSE command after a WP to change direction for the next leg. Then put more whenever you want it change direction again. The Buckingham Palace example was this exact scenario just copy it and try it yourself.
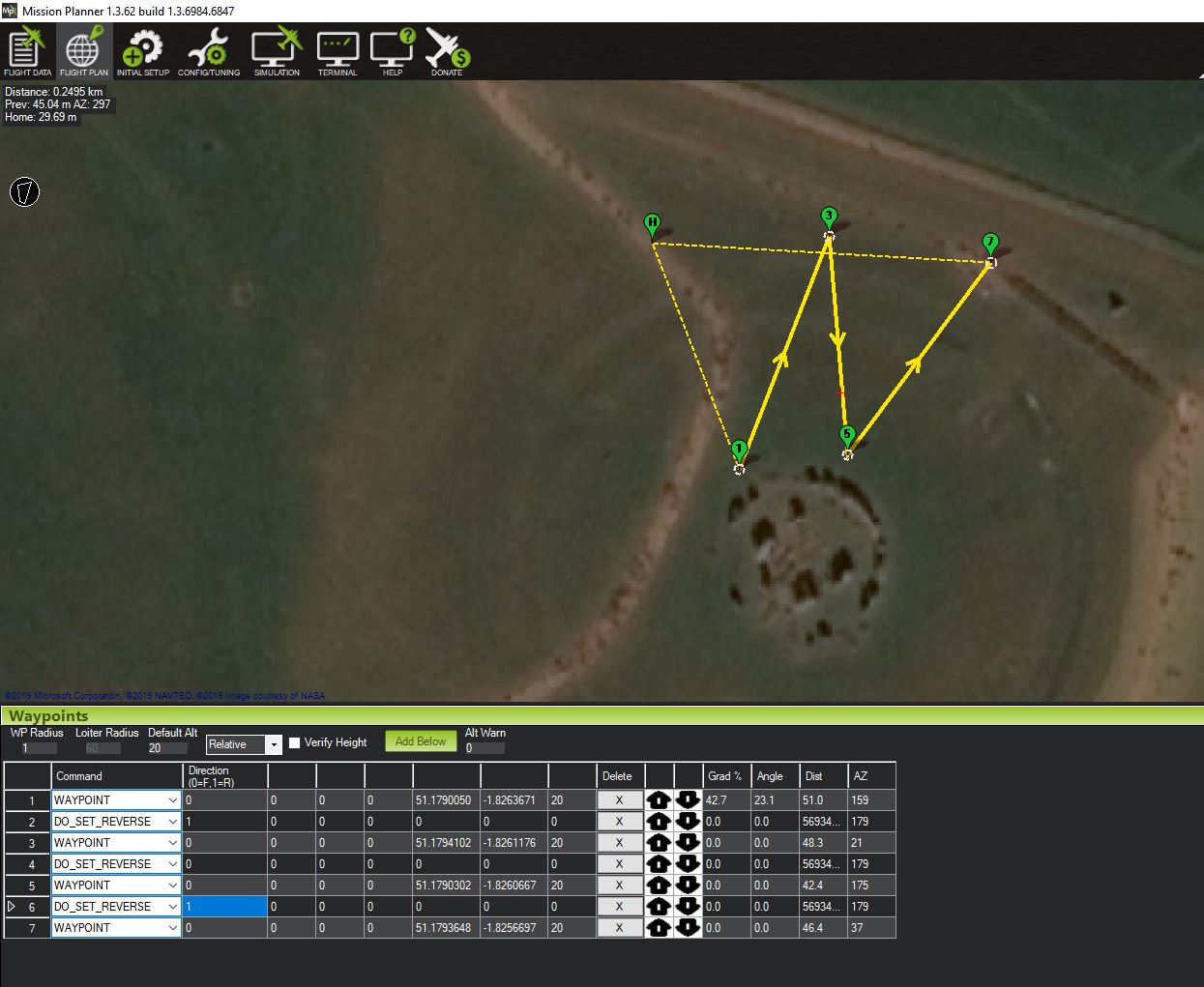
Here we are driving your mission at Stonehenge. Load the attached Waypoint file into Mission planner and check out the commands. Stonehenge.zip (317 Bytes)
Thank you so much for that it will really help me. And wow you actually done a run at stone henge? That’s cool, there’s me in my back garden and your at stone henge😂
It’s basically the set up you’re describing. The great Clive Turvey from the Piksi google forum and the U-Blox user support forum got a set and from what I can tell is pleased with it.
I bought a set and am also very pleased with it. There really isn’t any integration to do because the RTCM corrections are broadcast over the integrated radio, no need to inject GPS corrections over MAVLink.
The boards come with a JST-GH connector that goes straight into the Pixhawk. The Ardusimple name is cheesy but appropriate in my opinion.
Here’s a brief write up I did in the modules with my wheelchair setup:
ive tried but there seems to be a problem with my rover. its a simple thing to set a waypoint, then click add below and select the reverse function and choose either (0=F, 1=R). If I then clear the mission completely, add 1 single waypoint going straight the rover wants to drive in reverse in auto mode. I then need to reboot the pixhawk and then the reverse turns into forward again to head to the single waypoint. On my end it seems very temperamental
I think there is a parameter that enables reverse, make sure you can drive in revese in some of the lower modes, start in acro and work back up to auto
The rover is capable of driving in reverse because in the auto missions it has driven in reverse and forward but in a temperamental manner. It’s not doing it in the order that I’m setting it to do. I will run the checks on driving in Acro mode to see what it does.
In the meantime while I was outside I took some pics of my rover:
rover can reverse in acro, steering so im not sure if that’s the issue.
Just figured out how to go straight and reverse back! worked a treat @dkemxr only issue now is after the mission completes and I switch to manual, head back to home location and hit auto again to re-run the mission it starts instantly in reverse. a bug maybe?
then as I mentioned if I hit PREFLIGHT_REBOOT_SHUTDOWN the rover then stops starting the auto mission in reverse and resumes back to normal
No bug I don’t think*. As I mentioned a few posts up " Until it see’s another DO_SET_REVERSE command it will continue running in reverse". So either end the mission with a leg going forward or try using a DO_SET_REVERSE command as the last line in the mission to set it back to forward.
*Maybe it is as it doesn’t do this in the simulator. In any case the suggestions above should work.
Dave it worked ;D cant believe how happy I am right now!!! and like you said if you end it going forward if I restart the mission its perfect and restarts in the correct way. so glad right now, gonna put my rover back in auto and have a victory cigarette in the sunshine! thank you very much
That’s great Mus, you finally got there!! You had mentioned previously about wanting some long drive times. If that’s so the vehicle will run the mission continuously, or at least for X number of times this is easily done with a DO_JUMP command. Place it as the last mission command with the 1st WP in column 1 and the x number of times to repeat it in column 2. Just make sure the last Wapoint is a straight drive to the 1st Waypoint w/o obstacles.
Thank you for the additional info.
I did write a huge essay but I wanted to edit it to put it more simply.
What I’m trying to do on mission planner is to make my own waypoint mission using the reverse function as we’ve achieved today. Once I create that I would like to copy and paste it to extend the mission further…if possible?
I can press CTRL and highlight the waypoints and even drag them to a new location which is great, but so far unable to create a duplicate of the waypoints and add them next to the one I’ve created
I’m assuming that would just repeat the mission?
What I want is to have the mission and copy & paste the mission whilst keeping the original one in the same position & duplicating it
If I make my own custom waypoint in a polygon, so I have 10WP’s.
I want to highlight those 10 WP’s, Copy and paste them. so then I can 20 WP’s and place the copied WP’s either on top, bottom, to the left or to the right of the original 10 WP’s
that’s the problem. But I have been able to hold ctrl, select all wp’s and drag and drop them to a new location. the coordinates change accordingly when this is done. cool feature tbh.
What im trying to achieve is due to not having a skid steer rover but im going to have to buy one and avoid obstacles. the auto feature is great as it stands but im trying to tailor it to my rover using the forward and reverse function and its complicating things.
I’m looking to order some motors preferably off amazon prime, would like to ask what I should go for as there’s so many different types.
Also motors that will work well with the Sabertooth 12A that you mentioned. I would like something with decent torque that will handle driving through grass very easily. Thanks