Ya I was just trying to keep it simple as he had an APM he was messing around with earlier.
Are you using just the right stick for throttle and steering? theRCin on mission Planner will show moving the right stick forward and backwards effect the green bar on 2 and moving it left and right effects the green bar on 1.
Full parameter list MODE_CHx . If its channel 7 that’s giving you a high and low PWM then set it to 7
Post the parameter file again. The default parameter settings for Rover should work for you. They are:
Steering Servo on Main output chanell 1 and Throttle on Main output chan 3. You are confusing outputs with inputs. Default for flight mode is Chan 8. Change it to whatever channel you have your radio switch setup on. You know how to do this, it was already discussed. You should not have to make any changes other than flight mode channel and steering servo direction to get this vehicle basically running. I have built 2 Rovers and other than maybe having to change the steering servo direction they run with defaults.
And if you are configuring to use passthrough you may as well strip that Pixhawk out of there and connect the steering servo and ESC diectly to the Receiver.
1 Like
here’s the parameter list. I did take my rover for another run but the bin file is too large to upload on here. Good news its working in manual and even looks like its trying to head towards the waypoints rather than just going crazy like before.
ArduNoob Param.param (11.7 KB)
I remember you mentioned about checking that the rover is facing N,S,E,W in the right way but seems its not, rather the opposite when im viewing it on MP. I have calibrated it thoroughly. more than likely that’s the cause of the rover not following the waypoints
Is the GPS/compass module pointing the right direction? You had this wrong before. Also, disable Compass 2, it will do nothing for you.
And regarding flight logs yes, they are typically too large to attached directly. Be prepared to link to a cloud storage service (Dropbox, whatever) for that.
a picture along with parameters would be good maybe. oops I see the parameter list now. picture may be useful or even a tlog.
I fix one thing and another goes wrong😩 ok so now here’s another problem.
When the pix is armed the throttle and steering work but the mode switch stops working.
When the pix is disarmed the throttle stops working, steering is still working and mode switch is then working. Not sure why all can’t run in Arm Mode?
Compass orientation seems to be ok & pointing in the correct direction now so one less thing to worry about
sounds like its refusing to switch for some reason. Can you arm into the modes you switch into when not armed?
as ever logs would help
Yes when it’s not armed it’s switching, when I arm it refuses.
What modes is it refusing to switch to? Does manual to Acro work? manual to steering? or is it just GPS assisted modes?
How are you arming? Because the last Parameter file you posted shows ARMING_REQUIRE at 0.
First I required arming with the switch connected to the pix. Then I disabled arming but I think the arming or the way it’s armed is affecting the way things work like the throttle.
For example everything works but the throttle when I arm it, the red light on the switch blinks & I press it & it turns solid red which is armed.
Everything is bypassed for arming requirement except for the throttle by the looks of it.
I’ve also just received this:

I think my compass was a bit glitchy too & ive read reviews about this gps compass module being decent so will hook it up when I get the time
I have not used a safety switch in a while but I don’t remember it arming the system. It was more of a safety against accidentally arming the system as I recall.
The safety switch doesn’t arm the system it enables/disables output to the motors/servos. Disable it from Mission Planner while you are troubleshooting the system. You can enable it later after you have basic functionality.
When I start everything the motor activates for a second & then cuts out, both steering & the mode switch on the transmitter remain functioning but the motor for throttle doesn’t continue working. Not sure why it’s cutting out but I’m assuming it has something to do with the ARM function or Safety Checks once the pixhawk is turned on.
You can go to full parameters and set ARMING_CKECK to 0. That will disable the safeties. I am building a rover currently and I disarm the safty checks for testing. I was having a similar issue with nothing happening and it was because I had no gps lock.
The arming check has been set to 0 and i have gps lock & it’s showing around 15-20 satellites with the new RadioLink SE100 gps module I’ve revently purchased.
Steering and mode switching will function un-armed.Of course like many issues you are having there is good reference material that have been linked to several times now. Google “Ardurover Arming” and see for yourself. Same for the Safety Switch if you are using it “Ardurover safety switch”.
I would suggest disabling the Safety Switch from Mission Planner and configuring a switch for Arming. Again, note that the Safety Switch and Arming are 2 different things. I’m talking about an Arming switch on the transmitter. It’s discussed in the section I suggested above.
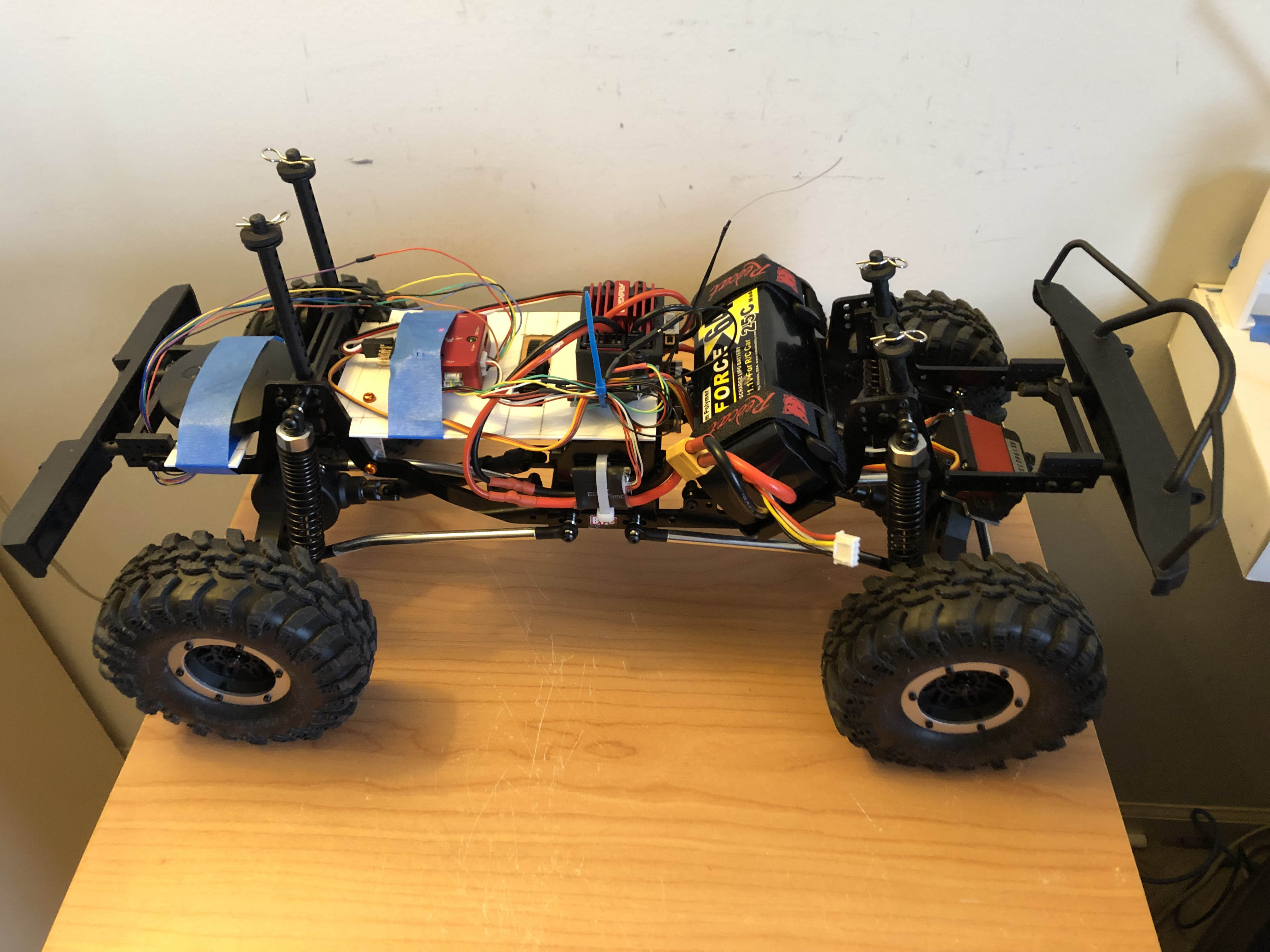
Attached is my new Rover in it’s test phase. Everything working well I just have to mount the GPS and secure everything and tidy it up. Too cold here to do any real tuning but it seems to handle pretty well already.

1 Like
I will look into the areas you’ve explained. That is a nice bit of kit you’ve made.
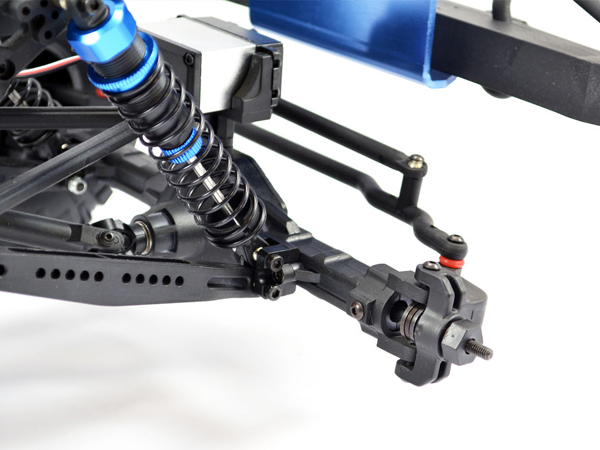
Wanted to ask you as you’ve made something similar to what I’m making:
With the front steering even if I purchased a servo with a higher turn angle the wheels still can’t turn due to a plastic bar going from one wheel to another which restricts it from turning at a higher angle. Is there a way around this to mod it so it turns more sharply? This is the one I have: