Hi Chris I can build for you no problem!
Alex
Edit: build added
Hi Chris I can build for you no problem!
Alex
Edit: build added
Alex, thank you very much!
Dear Alex,
I want to thank you very much for your wonderful work on MultiWii Serial Protocol integration in ArduPilot!
Today I stumbled upon this discussion here and had to immediately gave it a shot. I am excited to give positive feedback.
I do not have the DJI digital FPV system, but instead the DJI Goggles RE (for connecting with the DJI Mavic and Phantom 4 quadrocopter lines) with the DJI Ocusync Air unit and was just looking for a way to get telemetry going for it using ArduPilot.
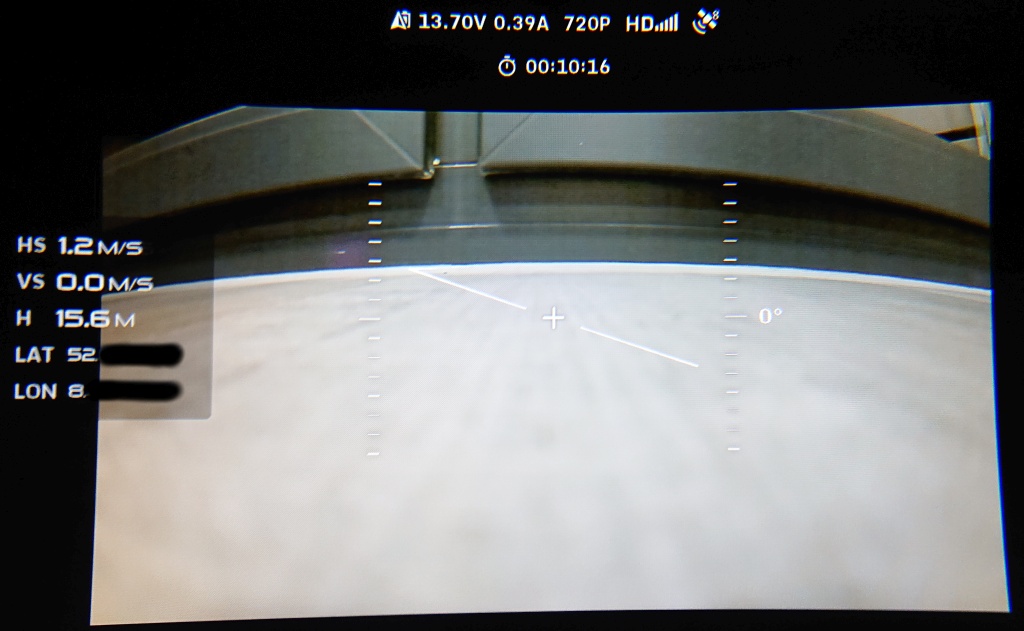
I downloaded the prebuilt firmware MatekF405_msp_0.7.zip for my older Matek F405-CTR from https://github.com/yaapu/ardupilot/releases, loaded it into the board, hooked it up to DJI Ocusync Air Unit (Telemetry on UART3, ArduPilot Serial1 in setting 30, as in your first post above) and had immediately telemetry data on Goggles RE: I see GPS data, orientation, height, speed, satellite count, battery voltage and current - just fantastic. 
Thank you very much!
Can’t wait for this code to get merged into ArduPilot/master.
Cheers,
Risto
Hi Risto, cool I had no idea it would work 
Can you do a screenshot so I can add it to the docs?
One more question does your setup need any telemetry info that my code does not provide yet?
One last info, what version of the DJI firmware did you use?
thanks a lot for your feedback!
Dear Alex,
I gave my very best to take a photo from the Goggles RE eyepiece with a camera… not perfect, but I hope it is good enough for the docu (the fractional part of the GPS coordinates I blackened in post/image editing).
I guess the DJI Goggles RE is not programmed to display any further data. In a YouTube video about iNav integration also no further fields can be seen.
For the DJI Goggles RE and OcuSync Air Unit I use the latest firmware (both v01.00.0700).
Cheers,
Risto
Hi, both pictures are fine, thank you very much!
Great. (P.S. a small typofix in your first post: twice “Googles RE” instead of “Goggles RE”).
Cheers!
oops, typos fixed thanks Risto!
It’s just worth noting that the RE system supports Mavlink natively however if I recall they may be one or two of the osd items that work better under MSP.
Thanks Ian, always spot on 
Dear Ian,
can you briefly elaborate more on Goggles RE MAVLink native support please.
Inspired by your post, I just checked this (again) with ArduPilot. If I set the SERIAL1_PROTOCOL value to 1 (MAVLink1) or 2 (MAVLink2), I do not see any telemetry info in Goggles RE (SERIAL1_BAUD 115, SERIAL1_OPTONS 0).
Setting the SERIAL1_PROTOCOL to 30 with Alex’s MSP branch ArduPilot Firmware, gives me nice telemetry data in Goggles RE (and I did power off the flight controller, OcuSync Air Unit and Goggles RE and restart them every time I did a protocol switch in ArduPilot config).
Is there a trick I am missing?
Best,
Risto
Search YouTube for it there is a video I have done ages ago it. there is also a few threads on here somewhere discussing it.
One requirement is is must be on the latest firmware and you may need to switch the TX and RX lines. As for settings it just the usual Mavlink just like a telem radio. default settings for UART works.
Hi Alex,
Apologies for the dealyed reply. I took the plane out Sunday and didn’t make it past launch 
Anyway, I did some digging and worked out that somehow, probably during a 1am soldering session, I had the TX/RX wired wrong between FC and DJI. Swapped the lines around and presto, MSP works!
So, I can confirm that Arduplane works with MSP support on a Matek F765-Wing!
Thank you for all your hard work thus far.
No worries, all of us at least once did a 1am faulty solder job
I want to briefly come back to the issue of DJI OcuSync Air unit with Goggles RE and MAVLink support. I did some tests and I am pretty confident that at least with the present FW v01.00.0700 there is no MAVLink support on this DJI equipment.
I hooked up two FTDI converters, one to the Telemetry Tx line, the other to the Telemetry Rx line and observed the output of both with SERIALx_PROTOCOL in ArduPilot Telemetry serial output port set to 1 (=MAVLink1), set to 2 (=MAVLink2) and set to 30 (=MSP).
Only in case of 30 (=MSP), the OcuSync Air Unit keeps polling the data and can convey information back to the Goggles RE. With SERIALx_PROTOCOL set to 1 or 2, I see in the serial capture that the OcuSync Air Unit tries to poll for a brief moment after start (using MSP Protocol, I see “$M” strings), but then stops.
My conclusion is that without the work of Alex, implementing the MSP protocol in ArduPilot, DJI Goggles RE with OcuSync Air Unit would NOT be able to receive telemetry, at least with the presently latest FW.
I would be interested to hear from anybody, who can prove me wrong.
Cheers!
Thanks for the detailed feedback Risto!
Sorry but this is wrong and it natively supported in the last release as I beta tested it for DJI. Also this is why I specifically added it to the Wiki as working.
Here is the video I made showing it working and how to set it up. https://youtu.be/6tCBVynN8EI
There is also at least 2 threads on this forum of other users using it with out issues in Mavlink.
Here is one of them where the user was having issues but he had not updated the firmware
The only bit that does not work correctly is the GPS layout if I recall.
While Alex addition means it works natively with MSP Mavlink works fine on the original RE system.
Dear Ian,
your reply gave me further motivation to look into the issue. And you are right - DJI Goggles RE with OcuSync Air Unit also supports MAVLink. How DJI solved supporting MSP and MAVLink at the same time is quite clever and took me some time to understand. The difficulty lies in the used baud rates. MSP is using 115200 and MAVLink 57600 baud. By looking at the OcuSync Air Unit Telemetry Tx line, I see that it is using 115200 baud MSP and 57600 baud MAVLink after cold start back-to-back to query with which protocol it should talk to the connected flight controller/OSD.
My fault was that I was using 115200 setting in ArduPilot SERIALx_BAUD, also for MAVLink, whereas for MAVLink ArduPilot baud rate needs to be set to 57600 baud (also for the debug-tool… which was an error in my part).
For someone interested in more nitty-gritty detail can read on down below, for someone just to have a brief overview, here’s a quick summary: DJI Goggles RE with OcuSync Air Unit will also output telemetry to ArduPilot with SERIALx_PROTOCOL set to 1 (MAVLink1), it is important that the SERIALx_BAUD is set to 57. With MAVLink you although do not get GPS data (no coordinates, no satellite count) displayed in Goggles RE, whereas with MSP you do.
Here now in detail. What the DJI OcuSync Air Unit is doing on power-up is:
Step 1. OcuSync Air Unit requests using MultiWii Serial Protocol (MSP) at 115200 six values, namely:
1.1) 0x24 0x4D 0x3C 0x00 0x65 0x65, which is MultiWii request for message type 101 “GET MSP_STATUS”.
(0x24 = “$”, 0x4D = “M”, both together are the MSP preamble “$M”, 0x3C is direction and “<” means request, payload length is 0 and message type is 0x65=101=MSP_STATUS, last 0x65 is XOR checksum, which by zero payload length is always the same byte as the message type)
1.2) 0x24 0x4D 0x3C 0x00 0x6A 0x6A, which is MSP Request 106 = GET MSP_RAW_GPS
1.3) 0x24 0x4D 0x3C 0x00 0x6B 0x6B = MSP Request 107 = GET MSP_COMP_GPS
1.4) 0x24 0x4D 0x3C 0x00 0x6C 0x6C = MSP Request 108 = GET MSP_ATTITUDE
1.5) 0x24 0x4D 0x3C 0x00 0x6D 0x6D = MSP Request 109 = GET MSP_ALTITUDE
1.6) 0x24 0x4D 0x3C 0x00 0x6E 0x6E = MSP Request 110 = GET MSP_BAT
And now happens the trick that I was previously not able to decode, as I had my debug tool at 115200 baud - OcuSync switches to 57600 baud and sends out MAVLink v1 frame:
Step 2. 0xFE 0x06 0x00 0x01 0x01 0x42 0x64 0x00 0x01 0x01 0x00 0x01 0xD1 0x80
Here’s the byte-by-byte decoding of the MAVLink v1 telegram:
0xFE MAVLink v1 packet start
0x06 payload size = 6 bytes
0x00 packet sequence 0
0x01 System ID = 1
0x01 Component ID 1
0x42 Message ID 0x42 = 66 = REQUEST_DATA_STREAM
Next 6 bytes are payload 64 00 01 01 00 01 and they mean target system 0x64 = 100, target component = 0, req_stream_id = 1, req_message_rate (uint16) = 1 Hz, 1 start sending
0xD1 low byte of CRC-16 checksum
0x80 high byte of CRC-16 checksum
Step 3. then OcuSync Air Unit switches back to 115200 baud and requests again the 6 values using MSP as in step 1 above.
Step 4. it changes again back to 57600 baud and requests again the same stream start, but now with packet sequence being 1 and a new CRC because of changed content naturally.
After this, OcuSync Air unit stops streaming out (in my case with MatekF405-CTR), as the MAVLink messages from flight controller start coming in. In Goggles RE, I can see orientation, height, speed, battery voltage and current, but no GPS data. GPS presently only works in MSP mode.
In comparison, with flight controller in MSP mode, OcuSync Air Unit keeps repeatedly polling the 6 MSP requests, as in step 1 above (at roughly 100 Hz).
Update: for someone interested, I add two Saleae Logic analyzer software captures of DJI OcuSync Air Unit telemetry Rx and Tx lines during the first 10 seconds after cold start:
Saleae capture of OcuSync Air Unit with ArduPilot in MAVLink1 mode.zip (142.0 KB)
Saleae capture of OcuSync Air Unit with ArduPilot in MSP mode.zip (997.3 KB)
I have flashed version 0.9 for F405-Wing, but in MP no protocol 30 and also no MSP_OSD_* entries …
Are the entries for Yaapus Default OSD Screen also available for download?
Edit: is not necessary… The MSP branch has version 0.7 … FrSky BiDir 0.9 …
Edit2: works perfectly!
What about if you have 2 pair of goggles and put one set in audience Mode will they record the osd ?