Hi Alex
Very new in this hobby and busy with my first build. It is a quad, with a orange cube, kore carrier board, here 2 gps, dji hd goggles and air unit. Can you please help me with the osd setup and how can we compensate for your work and time? Thanks
Hi, what is your issue? I’m sure we can help you get your quad running!
Thanks for getting back to me, how do I connect the air unit to the carrier board and where do I upload the program you wrote?
Sorry for the stupid questions.
Josh
Let’s assume you have your quad working without my code, you probably used Mission Planner or QGC to flash a recent firmware on your Cube Orange: to enable MSP support you need to flash your cube with my version of arducopter.
Please remember that this is experimental code and as such is not the best choice for a beginner, having said that many users are flying it so it probably is mostly all right 
After flashing my custom ArduCopter version you need to configure a serial port (telem1 or telem2) to respond to msp protocol.
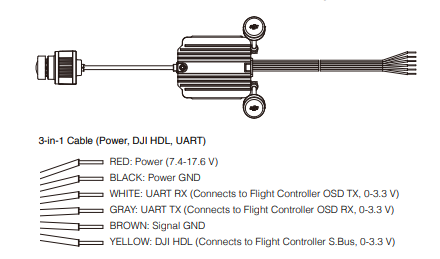
Let’s say you use telem1: connect the Air Unit to the selected serial port (telem1) using GND, Uart TX and Uart RX, (pick VCC directly from the battery if <= 17.6V) to telem1 GND, telem1 RX and telem1 TX respectively.
Set the following parameters:
SERIAL1_PROTOCOL 30
SERIAL1_BAUD 115
reboot!
A full step by step guide is probably OT but this will get you started!
1 Like
Thanks Alex will give it a try
1 Like
No DJI does not support OSD recording at this time, its a clean feed
Hi All,
Can we expect the MSP code to be merged to master soon?
I would be very happy about this as well. It works very well, I have had no hiccups with v0.7 whatsoever.
2 Likes
Hi, don’t know how soon, it’s under review now.
One big question is: will MSP support be enabled for 1MB flash boards
MSP support requires about 9KB of flash and on some 1MB boards there simply is no space left, for instance it will be hard to support it on kakutef7 without disabling something else.
We need people to let us know if MSP support is a “popular” feature among 1MB boards such as:
- MatekF405 Wing, STD, CTR
- omnibusF4 variants
- omnibusnanoV6
- kakuteF4
- kakuteF7 variants
- mini-pix
Hi Alex,
In my opinion as technology moves on it will be more and more popular.
In the world of FPV DJI is simply the best. I know a lot of people who fly INAV simply because of the MSP.
1 Like
Hi Alex,
I have uploaded your code selected option 30 for the serial port and brate 115.
All works just fine thank you for your hard work kind sir.
Regarding the 1MB boars. (What did you had to disable so you can compile for f405 std?)

1 Like
Hi Alex, I have a flight controller of my own design on STM32F405. Matek 3901-L0X is connected to the controller. I set it up to work with INAV, but thanks to you, it is now possible to work with Ardupilot. I build your version firmware, configured the parameters according to the instructions, the data from OPT FLOW and the lidar are readable, but for some reason the lidar readings reach a maximum of 30cm, with further ascent, the readings begin to decrease. Do you have any ideas about what I set up incorrectly?
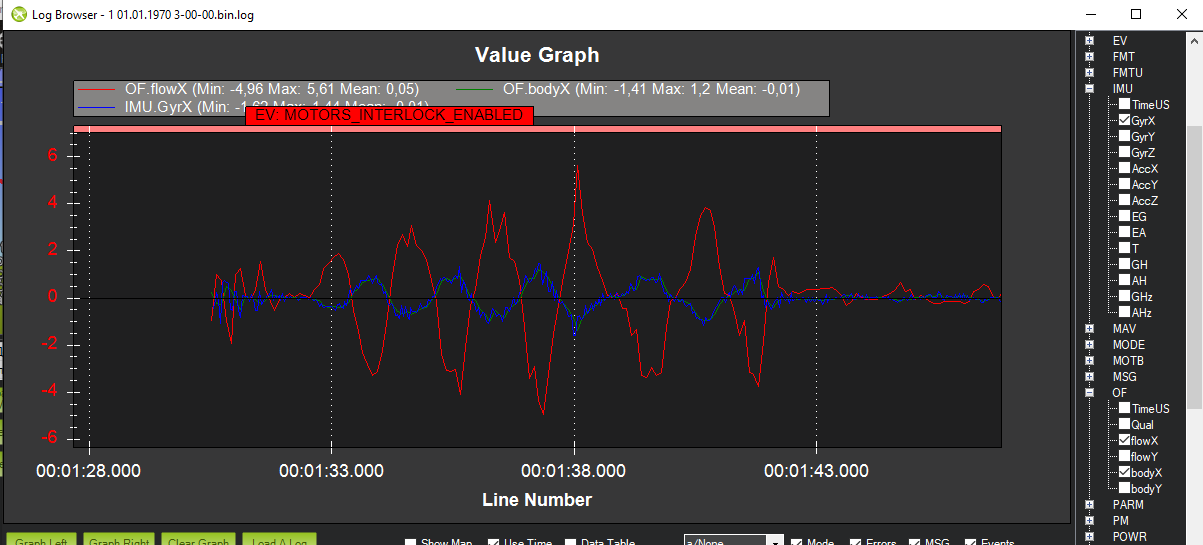
in addition. In the log strange values of flow and flow, changing the FLOW_FXSCALER parameter does not have any effect. And in LogAnalyzer, the message Test: Optical Flow = FAIL - ‘FLOW_FXSCALER’ not found
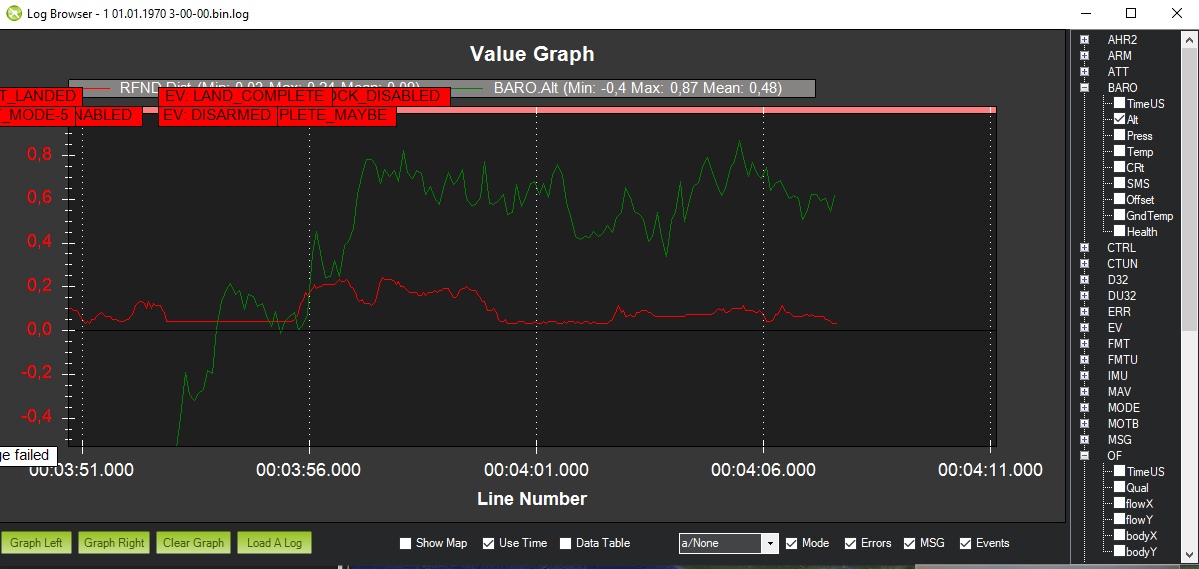
And this is the barometer and lidar readings, the lidar’s readings do not rise above 25cm
For what it is worth, I need MSP support on Matek F405-STD, please.
Hi, I tested the matek lidar and was working fine up to 200cm but haven’t properly tested the flow yet. We need a third tester :slight_smile
Hi, check the GitHub link, there are both the matekf405 and matekf405-std builds,
I understand, I will try another module, maybe something is wrong with this. I also want to check the parameters for the flight controller
I specified these:(STM32F405, FLASH 1024Mb)
define AP_PARAM_MAX_EMBEDDED_PARAM 1024
define HAL_WITH_DSP 1
define HAL_MSP_ENABLED 1
define HAL_MINIMIZE_FEATURES 1
Lidar is working! I will still experiment with optical flow
Great! Optical flow is untested so your testing is welcome
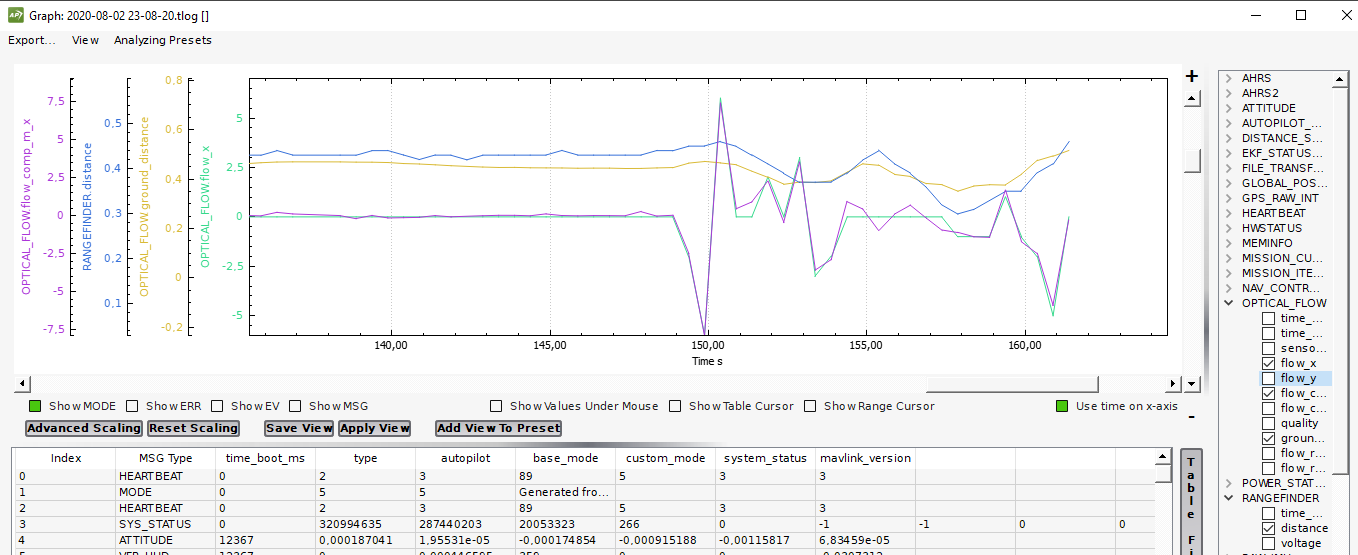
Telemetry log with Optical Flow. In my opinion, everything is correct. Tomorrow will try to fly in Loiter and flowhold mode. The only moment is the telemetry log, the dataflash log shows some strange data from Optical Flow sensor
1 Like
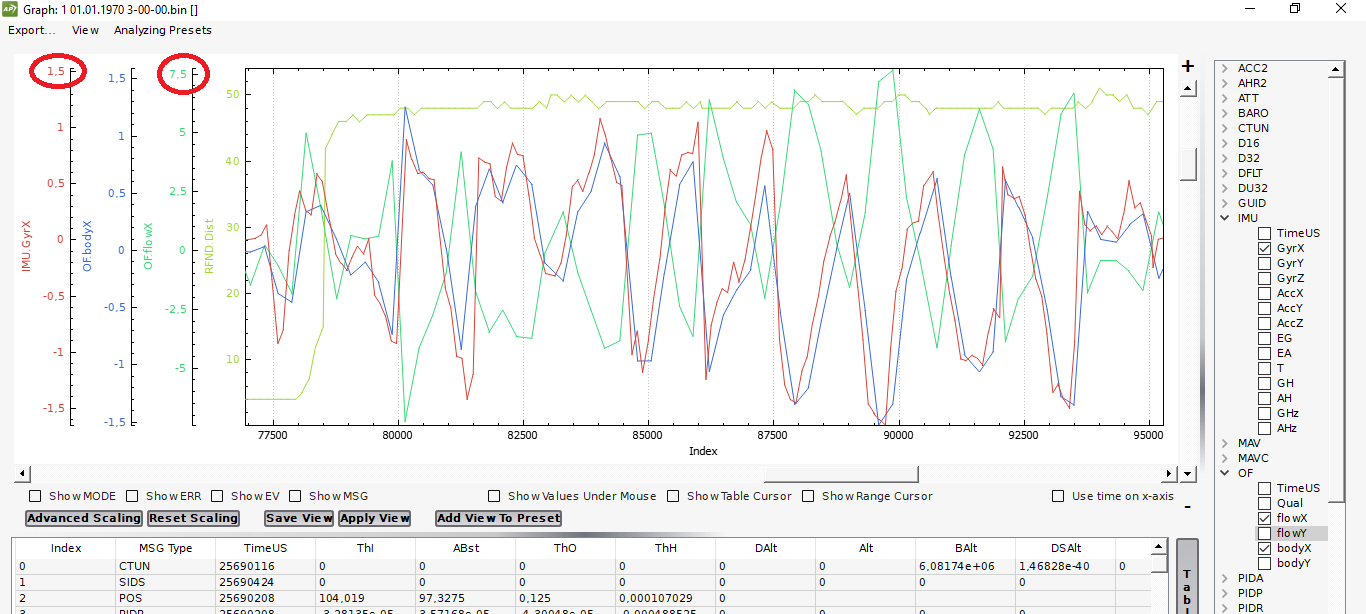
I’m trying to calibrate Optical Flow using the dataflash log. The values OF.flowX OF.bodyX and OF. flowY OF. bodyY on the charts for some reason with different signs, as well as at different scales, the values of scaler and orientation changes, does not help . Can anyone have any idea what the problem is?