Do I have to click on anything in Planner?
Do I just have to go to the directory that has the flight logs on?
Quadrotor>1 and then the .bin file.
I think the problem is the ESC. I switched the remote control just to be sure and the same issue is happening. I’m using the 4 in 1 Tekko32 Bheli_32. The flight controller is the Kakute H7.
Is it possible to use the regular ESC on this FC?
You can use just about any ESC that accepts PWM or Dshot. But the Tekko 4in1 is very popular, they are used by many on the forum. If the motors run correctly in Mission Planners Motor Test it’s not a problem with the ESC.
I managed to get it working. I still don’t know how. The motors respond to the transmitter now. Although, I don’t know much about DIY drones since this is my first. When I push the throttle at max, it doesn’t seem like they are rotating at the max level. Is that because there are no propellers and the FC doesn’t detect any movement in the air? As a matte of fact, I will record a short video to show you how fast they are rotating and I will post a link to it, so you can tell me if it’s normal or there has to be some parameters to change.
Normal. Spinning the motors on the bench with the transmitter tells you nothing other than they spin and which direction. Use Mission Planners Motor Test to test motor order speed and direction. Spare the video.
https://drive.google.com/file/d/1-hbO-5okPOfYxA7FKpQnX4Q7J9kw-eev/view?usp=sharing
I think the video should help clear some things.
I did test all motors in Motor Test. They all are in the right order.
CW(4) CCW(1)
CCW(3) CW(2)
I also show the transmitter controlling the motors.
In fact, just by moving the throttle a tiny bit, the motors go all the way up.
At the same time, they are not going at max speed when I turn it all up.
As I said testing motors on the bench with the transmitter is meaningless. If the motor order is correct, mandatory calibrations done and Initial Tuning parameters set put props on it and fly it.
I try flying it with the props and the motors are not rotating fast enough to lift. I’ve already calibrated the ESC and the Extended Tuning parameters are set to default.
You have Dshot capable ESC’s configure for that protocol (Dshot 600). Then you don’t worry about calibration. Then from Blhelisuite in settings turn off Low RPM Power Protect option.
You don’t want default. As I said you need to configure the Initial Tuning parameters. There is a screen for that in Mission Planner. Conveniantly this is in Mandatory Hardware so as not to be missed before the Maiden flight…
Wow, I can’t even connect,
Apparently there is a 32 and S. I was using the 32, so let me try to use S.
After you solve that problem flash the Stable version of Arducopter. No reason for you to be running the developer version at this point.
I flashed the Beta. There is no Stable for the H7
Your 1st post says Kakute F7 mini v2. But whatever, Beta is fine. So you have a Kakute H7 mini?
I know, but I’m using a different one now.
Yep, this ain’t working. No solution in Google either. It’s just one problem after another.
If it won’t connect to the FC Blhelisuite won’t connect either. And there are some parameters to set to allow passthru anyway.
Dshot
I managed to get it working. It won’t connect if I have set the ESC as Dshot. I had to change it to OneShot in Mission Planner. Now, I can connect to Blheli.
After reading, this is what I get.
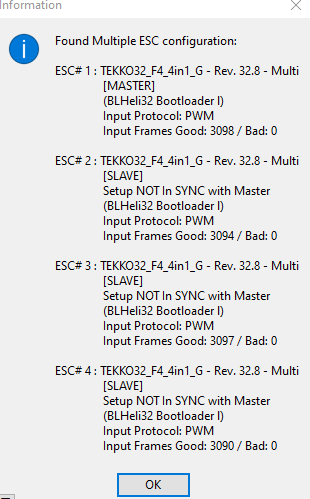
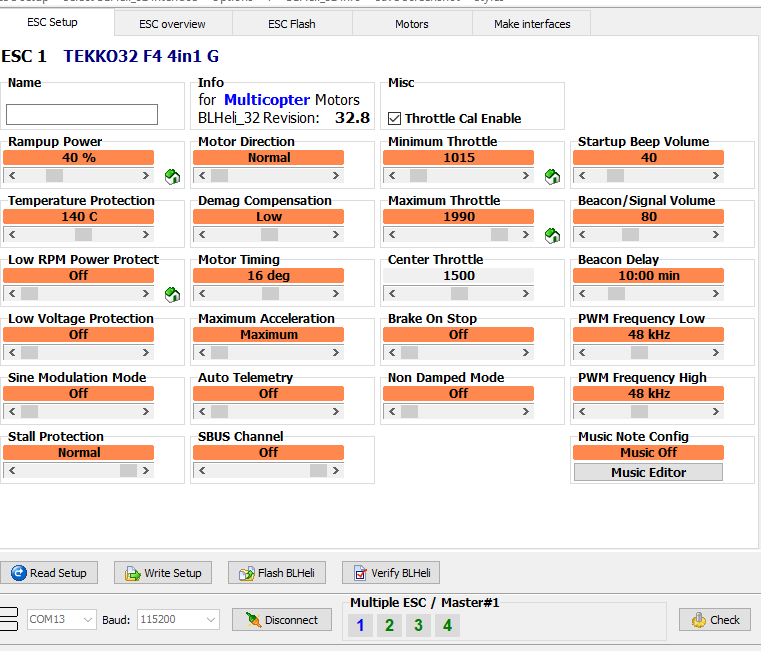
No. See that in a video? That feature is for high kV motors. It’s often why lower KV motors won’t run to full power.
Motors I’m using are 2200kv