Hello Friends
I am trying to adjust the MOT_THST_EXPO parameter for the h11 hobbywing motor using the motor thrust fit.excel found on this page.
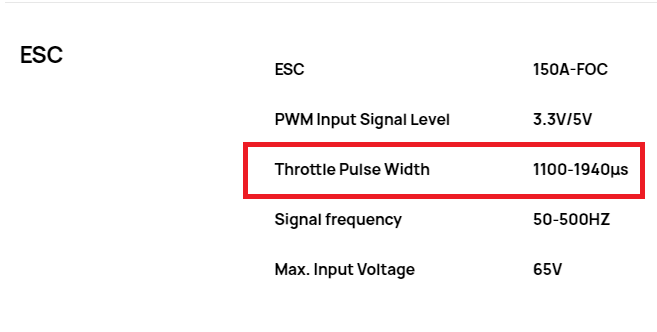
I got the table information from Hobbywing website.
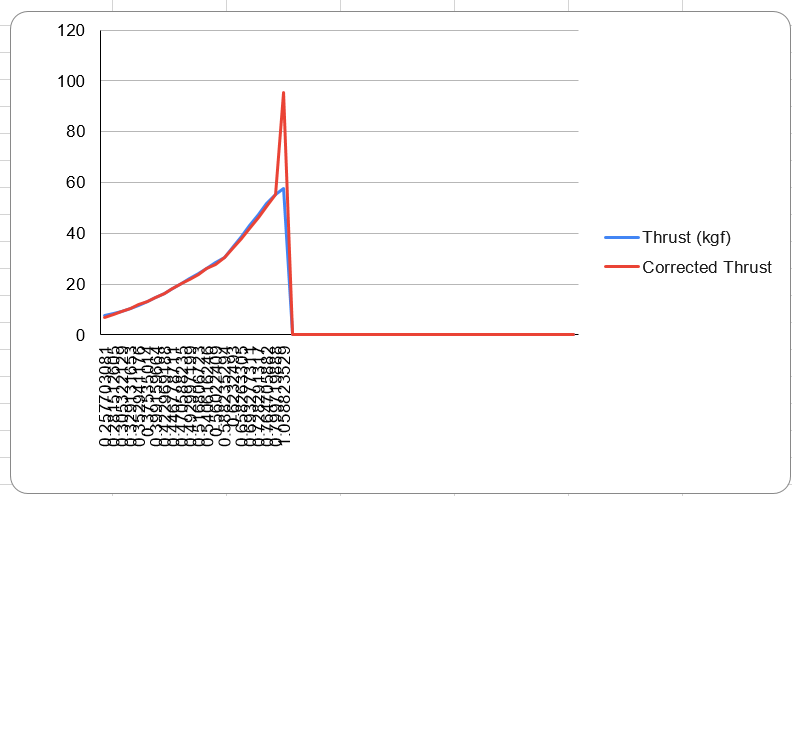
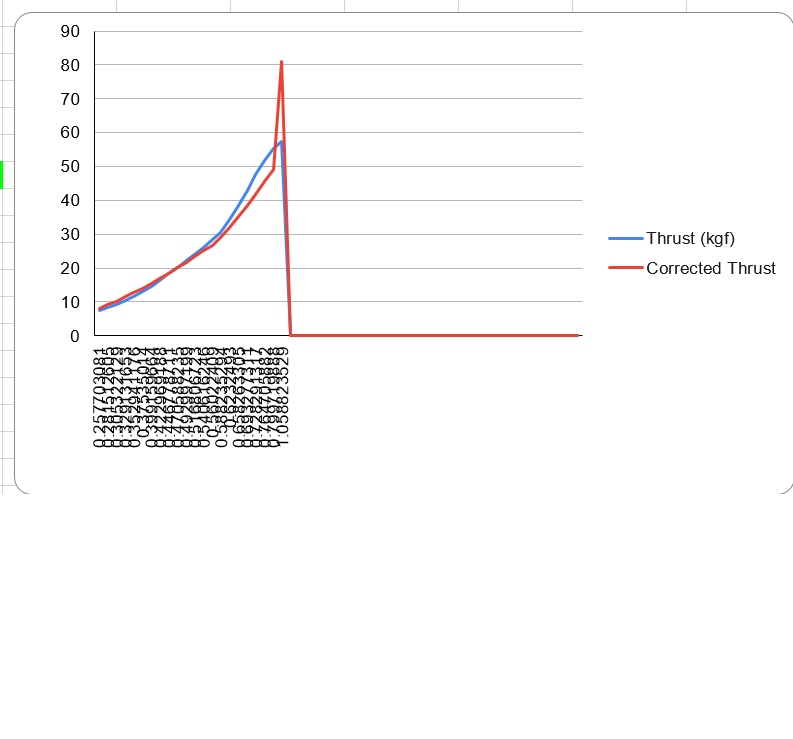
In the graph I calculated, Corrected thrust has the least difference with normalized thrust when MOT_THST_EXPO is 0.96 while the site explains that it should not be set higher than 0.8.
This graph corresponds to the value of 0.96:
Every time I use manufacture curves I get data I don’t believe. I have also never been able to get the same results myself. For example, the hobbywing data is below:
This matches an expo of over 1. That means the system is better than perfect as thrust increases.
My suspicion is that the Throttle(%) is not a ratio of PWM command but instead some non-linear relationship to PWM.
As to why I give the advice to not increase the expo over 0.8.
A perfect theoretical propeller provides thrust that is proportional to rpm. RPM is proportional to PWM with a relationship of kv * (pwm - MOT_PWM_MIN) / (MOT_PWM_MAX-MOT_PWM_MIN). This gives the perfect expo of 1.0.
A real system gets increasingly inefficient as the PWM increases. This reduces the expo below 1.0 because the slope of the upper end of the curve is reducing. Further we don’t start the range at zero thrust and again this reduces the expo. The end result is I have not seen measured data with an expo over about 0.8.
Thanks very much for this. I also independently (and coincidentally) received thrust data from HobbyWing (in Japanese) and came to the same result of 1.1 which I knew could not be correct. Garbage in, garbage out I guess. Thanks for confirming this!
My formula in the spreadsheet and MissionPlanner Initial parameters gives 0.84 for 48" props, but I would definitely use maximum 0.8 as per Leonards previous recommendations.
By the way, I’ve recently updated the spreadsheet linked at the bottom of this wiki page (which is what we’re discussing above) to make it more robust.
I’ve also changed the colouring in the cells so that it’s slightly more clear which ones people should update (e.g. update the yellow cells)
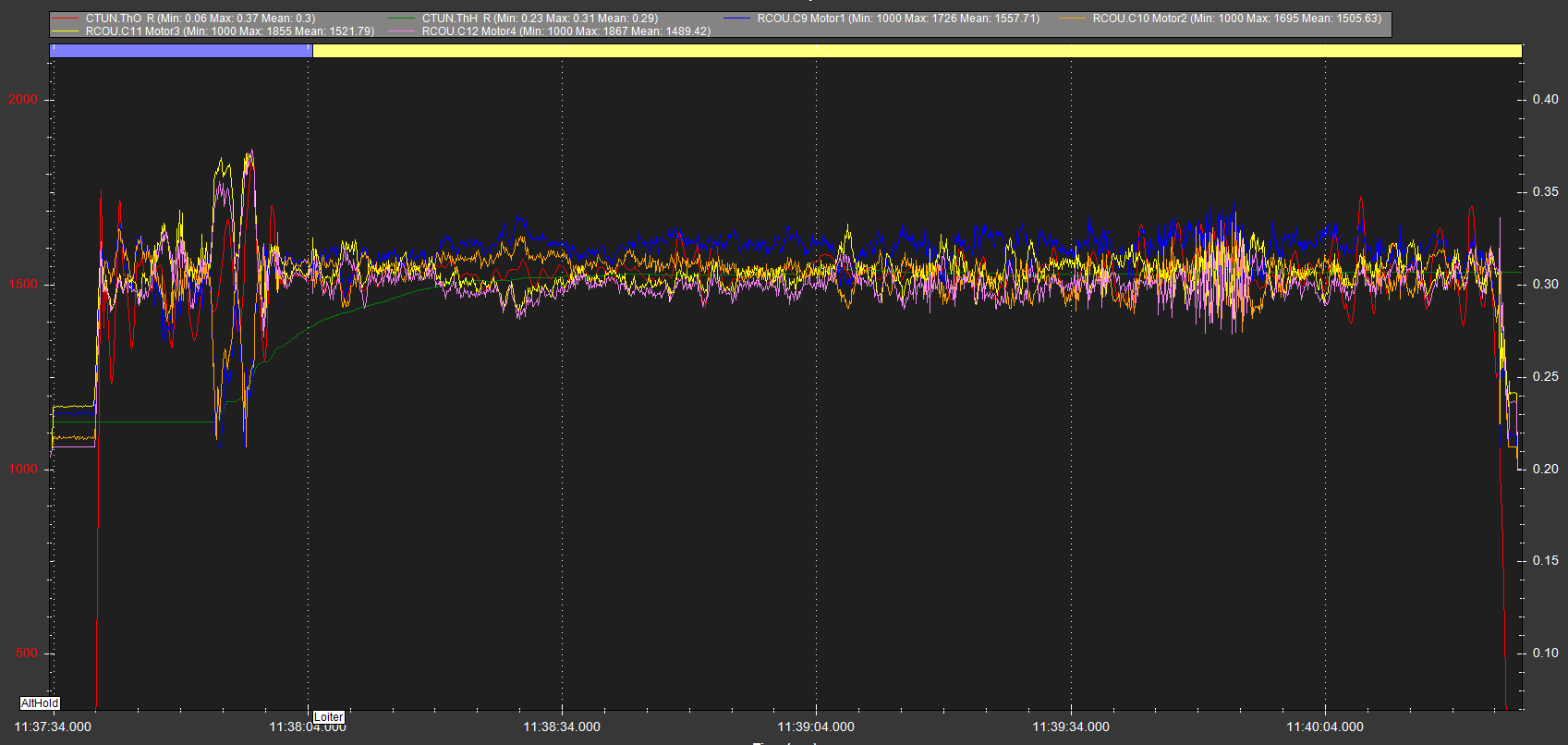
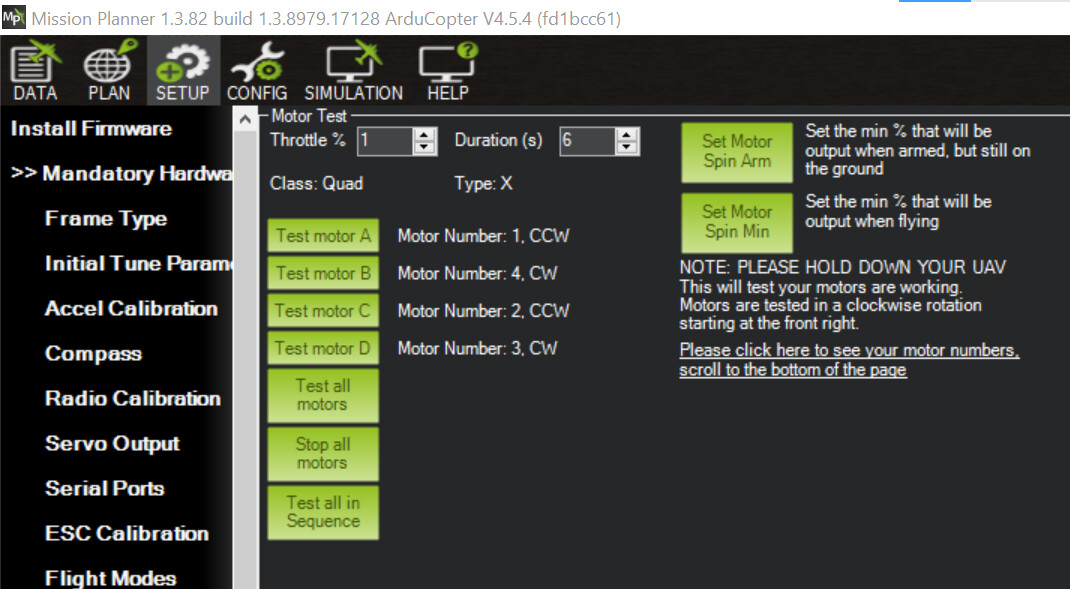
If the thrust expo has changed you should redo the MOT_SPIN_ARM and MOT_SPIN_MIN values in MissionPlanner motor test. The hover throttle will be different.
It’s more likely the hover thrust of 0.3 is more realistic.
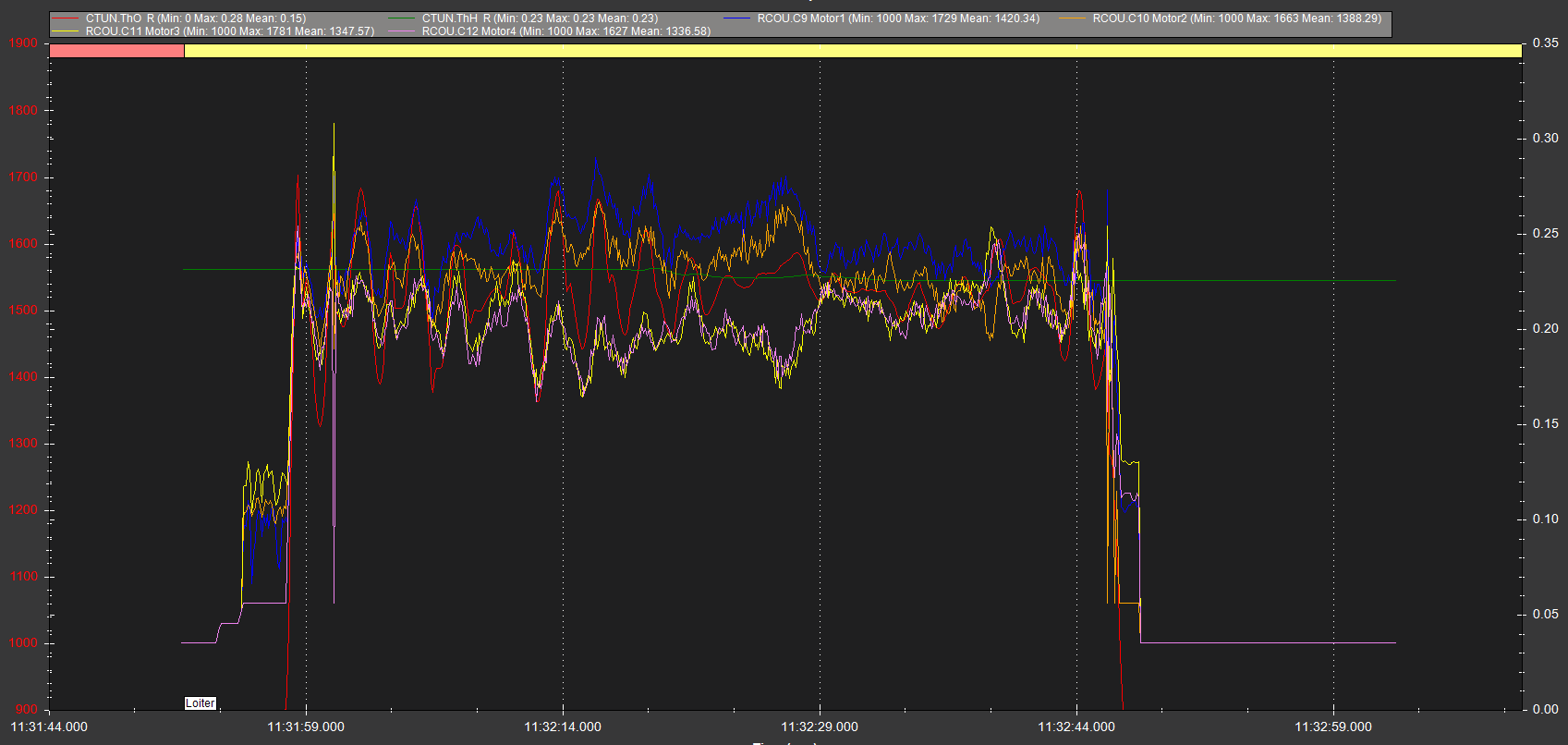
With thrust expo 0.64 the attitude control looks better. There could be different conditions for the two flights, unsure.
There’s still some tuning to be done though, like an Autotune. Had you just done the VTOL Quicktune?
The thrust loss messages are a warning about a physical problem that has been detected. Say an ESC and motor is commanded to higher output for some manoeuvring, but the change in copter attitude does not match expectations (repeatedly) - so Arducopter is forced to assume that motor is not producing adequate thrust.
The thrust loss messages are not something you can induce by slight configuration changes.