My Heavy Octa Quad with The below Details Crash just after Leaves The ground .
After the Good Take off in about 50cm above Ground and when ATC Tried to Correct the Roll Error it becomes Unstable and start to SWING in Roll Axis very Hard and Fast. I was terrified of Motors Sound and Crash Just Happend.
it was with the Default PID Paramaters . and for the First Flight always I Flight in AltHold for INOTCH Filter sampling . and this happend in the First Flight .
Flight Controller : Cube Orange + APM 4.5.1
Frame : Octa-quad (Coax)
Motors : Hobbywing H11M 48 * 17.5 Probes
Battery : 14S Lipo 22Ah
TOW : 40Kg (My case)
after Payload Coming TOW : 90 - 100 Kg
Motor Test is Done Before Takeoff
I know the
MOT_THST_EXPO = 0.5
Is not suitable for this Motor According to this .
but in my Experience Not Valid EXPO doesn’t cause this types of crash .
For a long time I use MOT_THST_EXPO = 0 for heavy Motors Like X9 by Mistake And @xfacta found it in Some Motors Desync that Cause the Vibrations .
I Think the Default PIDs is not suitable for the Heavy one Like This .
Maybe decreasing the Acceleration would Help . but I Think The Default PID Terms has to change .
I know this is not what I usually recommend, but let’s keep the harmonic notch filter disabled for now INS_HNTCH_ENABLE,0
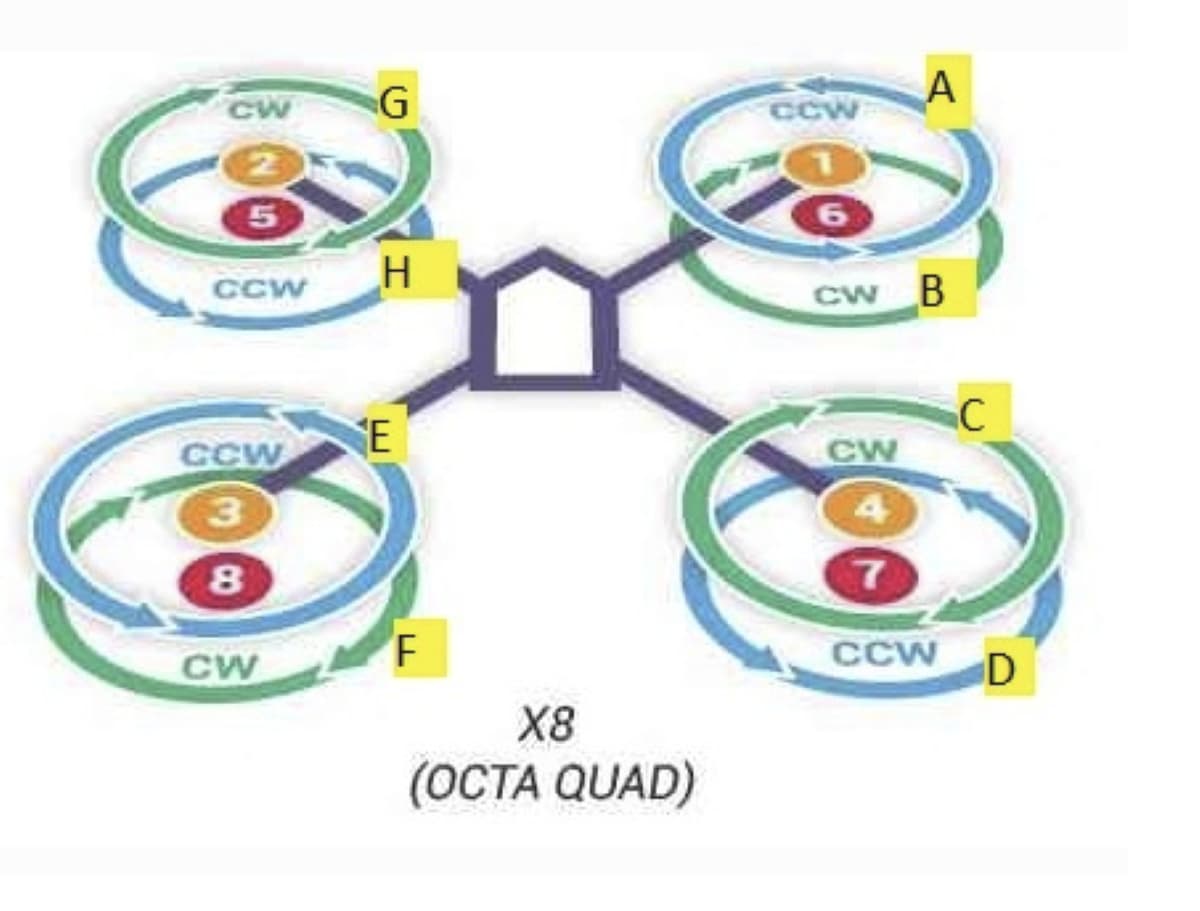
Now set LOG_DISARMED,1 and get into some MissionPlanner motor tests, doing “all in sequence” should spin the motors in this A, B, C… order as in this picture
The vibrations are not high during the motor test, but Z axis is much higher than X and Y axis.
This is similar to the flight log where all vibrations were quite high and Z axis was extreme!
Also in the motor test, it appears all motors test in sequence OK except Motor 6 appears twice and out of order.
Do another “all in sequence” test and verify only the correct motors spin in the correct order.
Maybe supply photos of the wiring and flight controller.
I retest The Motor 6 Manually , Becuase of that you seen this In RCOUt twice .
Order and direction of motors and Probellers are checked during this .
I will Post the FC mount and Wiring
Such a heavy big copter requires a methodic tuning as it is a dangerous and expensive vehicle.
Using ArduPilot methodic configurator software instructions is the fastest and safest way to achieve your goals.
Do not skip any of the steps especially because of the vehicle size
I am in this community for about 3 years and just now I noticed about this helpful and amazing tool that is developed time ago . I will use that step by step . Thank you again