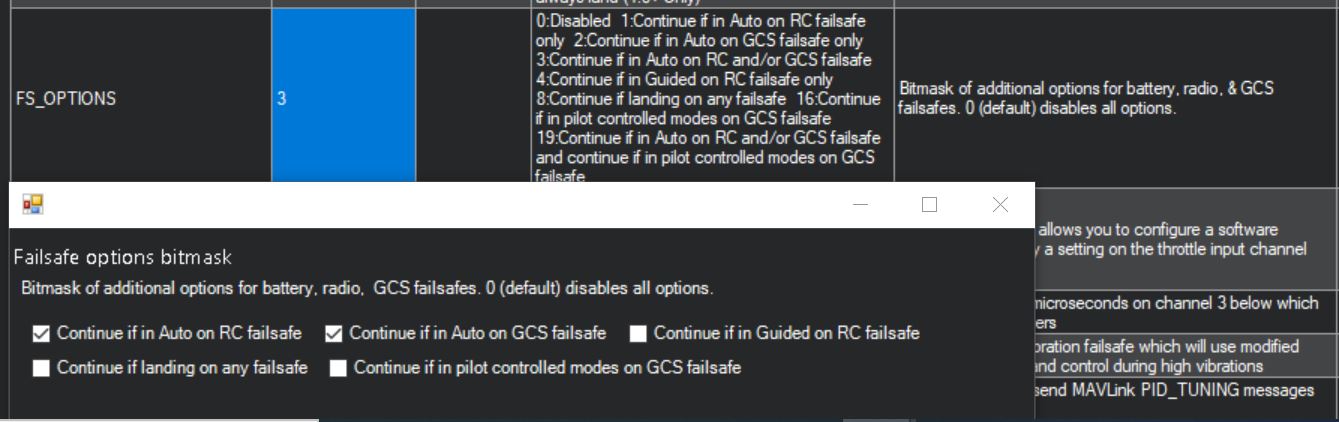
The mission is uploaded to the Flight Controller and is completely autonomous. There are a couple of Failsafe actions you can set for Continue with Mission. Loss of RC and loss of ground station. I always have these set with that option as the telemetry I use is not long range and even with the Frsky R9 radios I can loose RC on a longer Mission with obstacles.
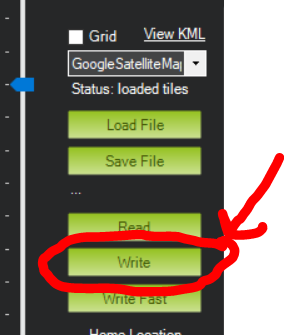
So once I plan my mission I click the write button, then once I am ready I can arm the copter, raise the throttle a little and then flip the auto switch right?
Yep. Either with Takeoff as the 1st command (arm, switch to Auto, raise throttle) or get it flying and Stable and then hit Auto. Whichever you are more comfortable with. You can end it with an RTL or a Land command at a waypoint. Autonomous flight is what got me into Ardupilot.
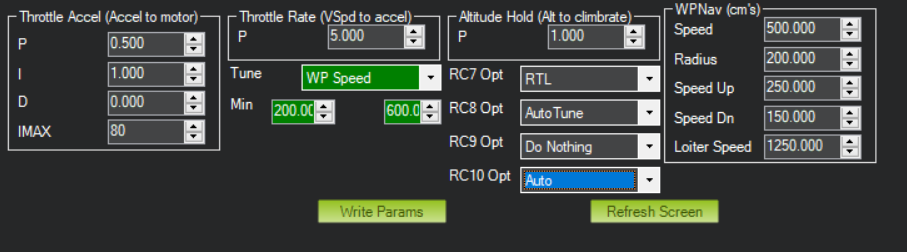
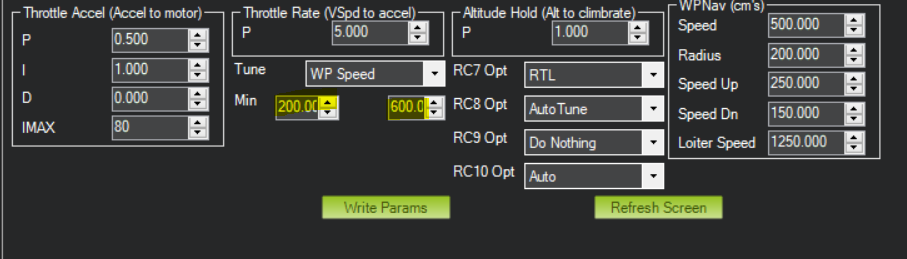
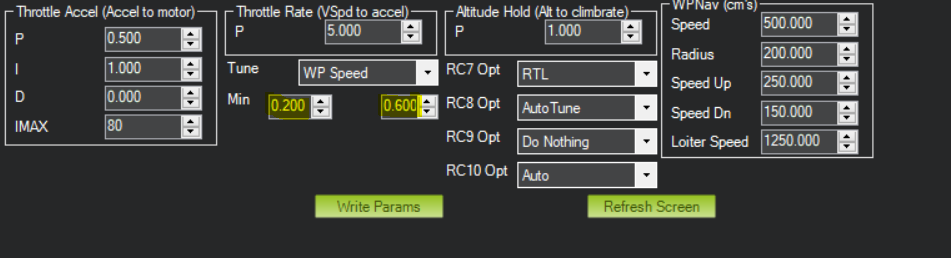
It’s coincidental you ask that because there is/was a bug in MP that would not set the range properly on the Extended Tuning page. Just 3hrs ago Mr. Oborne posted that its fixed in the next Beta. Otherwise in the Full Parameter List you can use TUNE to set the option and TUNE_MIN/MAX for the range in cm/s
BTW-The WP speed option will override whatever you have set for WPNAV_SPEED. So if your range pot is cranked to the max when you takeoff she will jet out at the max speed set. I always check that pot before arming!
.750 is 750 cm/sec and 1.5 is 1500 cm/s for example.
Yes, same Beta I have. I think it has always been this way for WP Speed. dekameters/s on the Extended Tuning page and cm/s on the Full Parameter list. I guess I have just adjusted. I did make a note of it on the Mission Planner thread where Mr. Oborne told me to report stuff like this