After successfully using Mission Planner previously with the help of Wine there was suddenly an issue with MP 1.3.73 and some items no longer displaying as expected.
The latest version 1.3.74 doesn’t start at all anymore under Wine but works rather well using Mono providing the full Mono package is installed first.
It appears most functions are working fully without any problems.
However, the Auto Analyzer under Data Flash Logs no longer works. (starts but nothing happens until about one minute later a message pops up saying “Failed to start Log Analyzer”).
Interestingly using the last version which worked under Wine - 1.3.70 and using Wine then the Auto Log Analyzer works as expected.
So it appears problem is linked to Mono.
…but other than that have to say rather impressive having it work so well now under Linux.
Thanks!
But that is the interesting thing: It did work on Linux previously with Wine.
…not complaining, just saying. Much rather have everything else working and just miss out on one or two things than having to find workarounds for a whole number of functions as it was with Wine.
Yes it works, no question there. Had been using it with Wine for the past few years.
The question was just in regards to Auto Analysis function which was working under Wine but doesn’t under Mono.
Also as Michael mentioned the SITL tab is also missing. But as he explained both run apparently under their own precompiled windows binarys.
So the only question in regards to those two (as everything else appears to be working fine) is if considering that they use precompiled windows binarys weather they couldn’t be run as a standalone application under Wine?
But I’m sure Michael has better things to do than to worry about that. Besides, I think with this latest MP version a milestone has been reached as far as running MP on Linux is concerned.
I dropped a bash script in an earlier thread that does most or all of that: feel free to find and update it.
The key thing missing in my mind is joystick support.
Hi James,
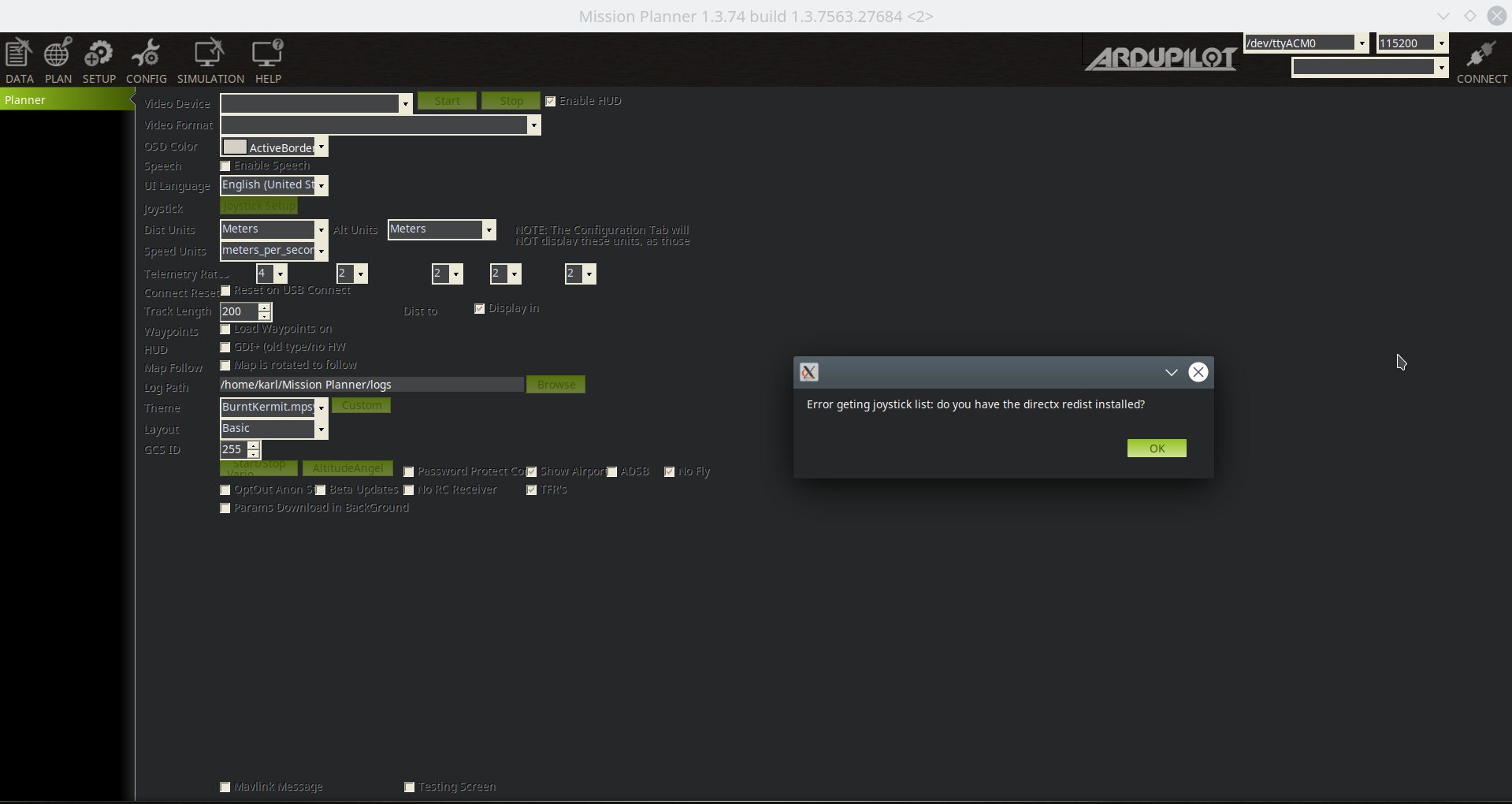
you’re right. Just tried with Joystick. Doesn’t work in latest version using Mono nor in 1.3.70 under Wine.
It comes up with a message asking for directx redist.
Anyway, still think the development is getting there given that under Wine a number of other things didn’t work at all.
I’m sure in time it will all be sorted.
Fully understand.
I been considering for some time to change from a multirotor to a VTOL aircraft but didn’t due to a lack of support / available functions.
Been watching development for many months and now am happy with progress and started working on one. - Also noticed QGroundcontrol have now VTOL support in recent Beta version.
I switched from Cygwin to Ubuntu and would love to use MP as in former times.
I installed mono and downloaded the latest MP as mentioned above by @xfacta
Ubuntu 20.04
mono 6.12.0.122 (tarball Mon Feb 22 17:33:28 UTC 2021)
MP 1.3.7563.27684
So far all looked fine, but when I try to connect to SITL, the parameters will never be uploaded completely - just ca. 50-70%. Then there is a very very slow progress.
Here I have a logfile of a try:MissionPlanner.log.4.txt (1000.1 KB)
(I left it uncut because I don’t know what’s interesting)
I’m starting without additional --out= but it seems that sim_vehicle.py is establishing an additional udp by itself (see last lines): sim_vehicle_complete.txt (3.2 KB)
Edit:
I updated to beta 1.3.7782.16148 -> no success (same behavior as latest)
I forced to use TCP on 5760 -> no success (no communication)
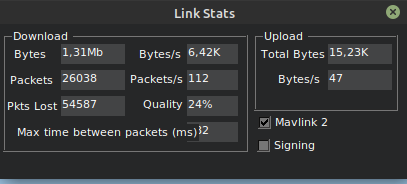
I tried UDP on 14551 -> no success (same communication behavior as on 14550
After having a beer and taking some time I’ve got it.
MAVProxy is not only offering UDP ports 14550 and …1, it also offers TCP ports 5762 and …3
So I had to edit the config.xml, disable the AutoConnect UDP ports 14550 and 14551
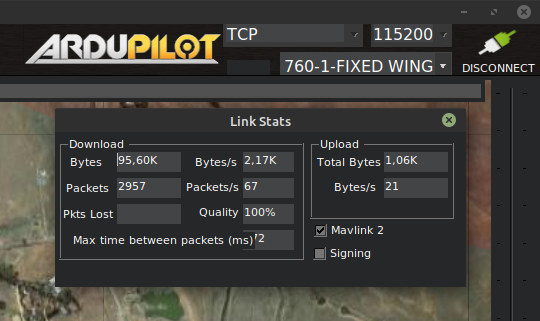
and connect manually via TCP to port 5762 or 5763
and all is running perfectly quick.
So all I have to find out yet is, how I could change the autostart of UDP to TCP:
“Label”: “Mavlink default port”,
“Enabled”: true,
“Port”: 14550,
“Protocol”: 1,
“Format”: 0,
“Direction”: 0,
“ConfigString”: “”
@Michael_OborneIs the autoconnect to TCP possible and if yes, how?