Thanks Sam. I know you have a lot of parts for the MT.
I like designing my own parts in cad as it also gives me more freedom if I feel the need to tweak something
I opted for the 1900kv version of the F80 to give it the ability to swing a slightly larger prop than the 2300kv version. I see the advantage of low pitch props for qad plane use
I have a trust stand and might also run some tests to check different props on the F80.
I will make sure the motors are securely screwed to the carbon arms.
I am still in the early stages of the build as I have been designing and printing key parts, and i am also waiting for some parts to arrive.
Btw. I was playing with the idea to invert the rear motors to put the prop disc below the trailing edge of the wing (and also more in line with the fwd prop disc). Do you guys see any problems or disadvantages with this?
Here in the states they are made with JST-GH connectors. While this is fine for a Pixracer, it doesn’t work for Pixhawk clones. Also, the Pixracer doesn’t work as a QuadPlane because it only has 6 outputs.
No issues. I used an I2C splitter. I don’t use the internal compass on the Pixhawk other than on my Antenna Tracker. I also don’t use multiple compasses because it was a pain to keep them all happy.
If that works better for you to clear the trailing edge with the rear props, then I can’t currently think of a problem with a downwards facing configuration. You should still have similar clearance to the ground as the front quad props. Obviously just need to check you have the right props rotating in the right direction!
This is our (WestCoastUAV) miniTalon conversion. I finally got around to using the mini quad arms and they worked out heaps better than printed mounts. It flew today in hover then we bungeed it to autotune the fixed wing side which went well.
The Qbrain I am using for the ESC did not work out as it is getting too hot and cutting out. Changing to discrete ESCs if they ever arrive.
Motor is a NTM3536 910kV with an Aeronaut 10x8 folder, battery at the moment is a Multistar 6000mAh 4S, Quad motors are RacerStar 2306 2400kV with 5x4.5 Gemfan bullnose props.
In a VTOL plane, what is the ideal thrust to weight ratio for the plane drive system? I’ve read it can be quite a bit less than a traditional plane as the quad is in motion so static thrust is not as significant.
Hi David
It really depends on your airframe. You will still need “extra” thrust to climb, above the thrust required for cruise, but that thrust can be generated at higher airspeed rather than at the lower airspeeds for takeoff where a high pitch prop might stall. Unlike a multicopters or aerobatic planes the thrust to weight is not necessarily the right metric to design a quadplane by (or any plane) for range or endurance, as the thrust should actually overcome whatever drag, including induced drag from lift, the aircraft has at that particular airspeed.
For best range or endurance it is important to have a propulsion motor and propeller setup that produces “just” enough thrust to overcome the drag at that particular desired airspeed. A way to think of the relationship of thrust and drag is that the consequence of drag is that it reduces aircraft altitude, and that “just enough” thrust will keep the drag from making the aircraft descend. Also one can produce more thrust than is required (from say a prop that has a over diameter prop) and one can produce thrust at the wrong airspeed (from the wrong prop pitch). So whilst a prop with good low airspeed thrust is good for takeoff, it’s unlikely to be ideal for the thrust required at high speed cruise. Further on launch a prop needs extra thrust to accelerate the aircraft to above stall speed and for climbout, a quadplane does not as it uses the quad motors for takeoff and can maintain enough lift for flight whilst the forward prop can slowly accelerate it to over stall speed, where the wings can take over the lift required to maintain altitude.
Typically to get the most efficient cruise you first find the aircrafts best glide slope airspeed and fly about 1.32 times faster for best range, and 1.32 times slower for best endurance. This “most efficient cruise” is also known as Carson’s speed. So once you know if you want best endurance or best range, you then select a motor/prop that produces enough thrust at that aircraft airspeed. Note that with electric motors, unlike combustion engines, you can easily over dimension the electric motor to produce enough thrust for climbing, whilst still being able to throttle back for just enough for cruise, without it negatively impacting motor efficiency. That means provided you have enough motor torque and RPM you should be able to configure the prop for “just enough” thrust to overcome drag at cruise, and still have enough reserves to climb at cruise airspeed. The prop will simply be “tuned” to the best cruise airspeed, rather than the typical compromise to allow for low stall speeds.
Given that lift is also dependent on airspeed, adding weight, in the form of batteries, also means that the Carson speed increases and typically also range. Adding weight to any aircraft increases wing loading, and also stall speed. But if you have a “unlimited runway” in the form of the quadmotors, this results in better overall aircraft cruise performance as you no longer have to have wings with a low stall speed to safely takeoff and land, nor a high thrust, low airspeed forward prop that is not effective at cruise.
Thanks for the reply. I think I am going to convert an FX 61 into a VTOL. I’ve read good things about the airframe. While I’ve looked, I can’t find any information about the airfoil to determine stall speed or L/D max which is typically max range.
Do you have ball park suggestion for plane t/w. I am thinking .50 is more than adequate. Then I can adjust prop diameter and pitch to maximize efficiency. But i have to get started somewhere!
It has been quiet some time but I have not been resting
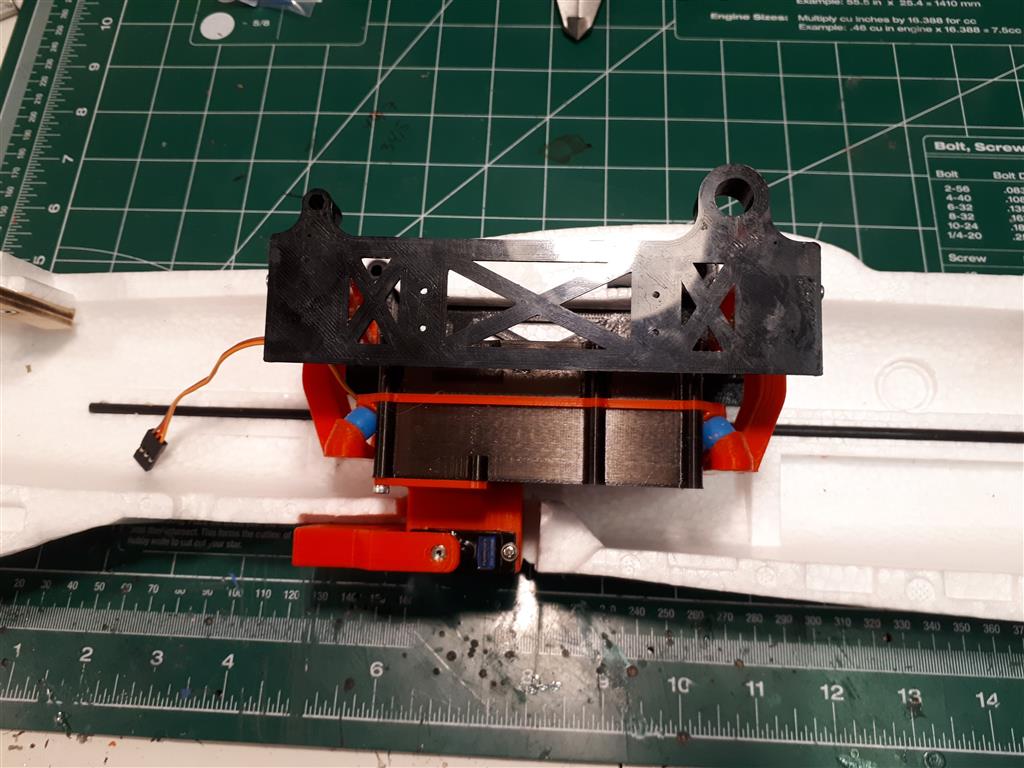
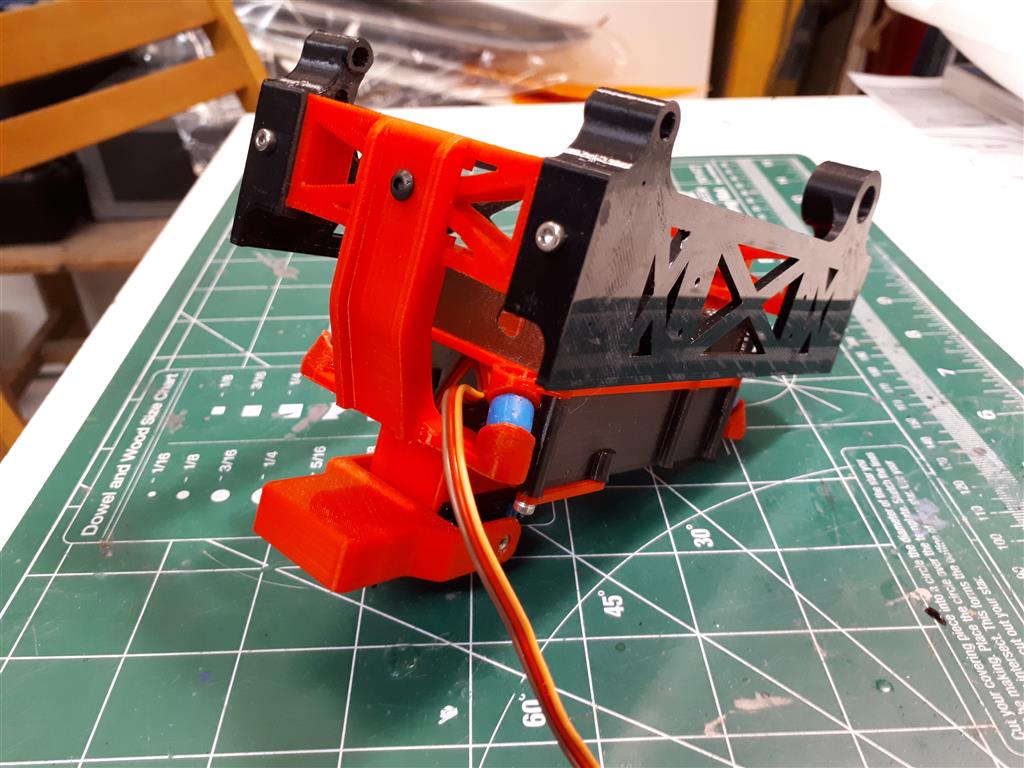
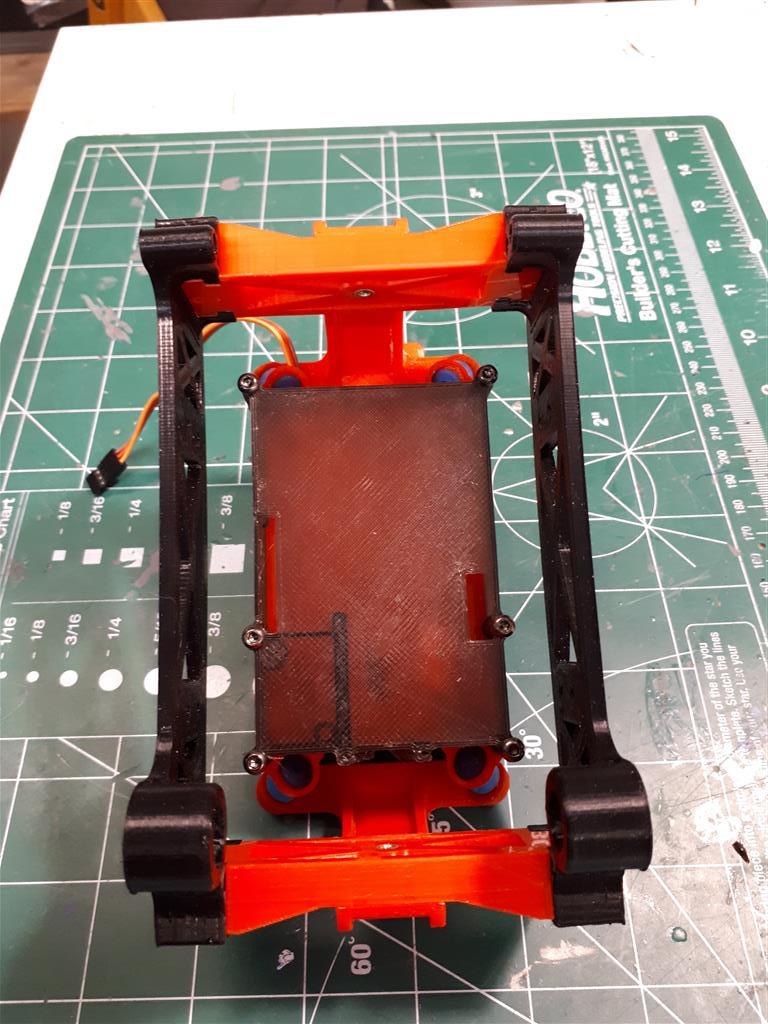
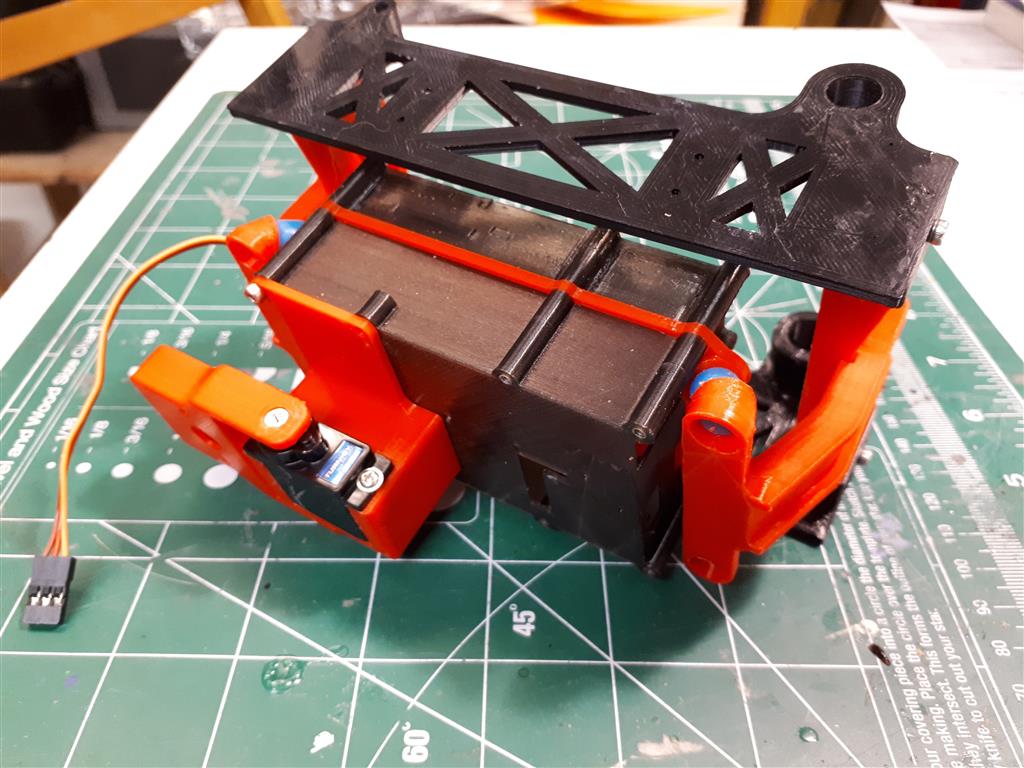
Inspired by the excellent Mozzie, Sam at PerthUAV and Greg, I have made some new parts and slightly modified some of PerthUAV’s to make it possible to have the avionics in the center bay under the wing (as opposed to behind the wing in their design).
The reason for this is that, for this project, I don’t need to carry any additional payload (at the CG). By moving the avionics forward I can reduce the all up weight as I do not ned to balance out the reward avionics.
I will of course make the STL files available when everything is confirmed to fit as it is supposed to