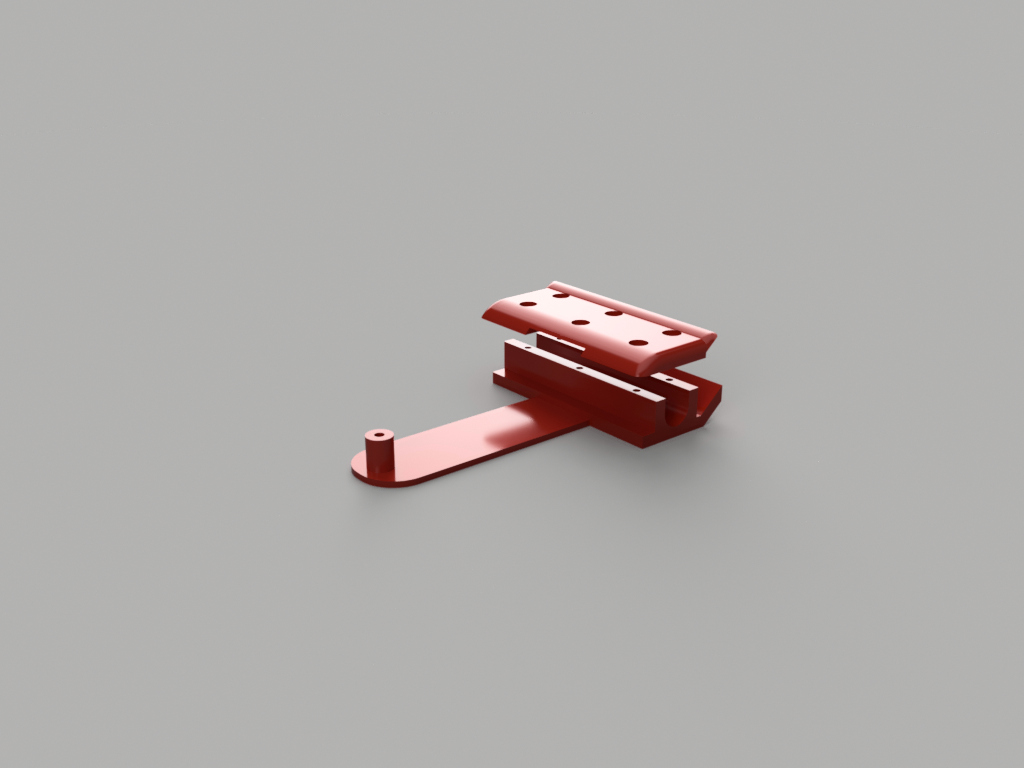
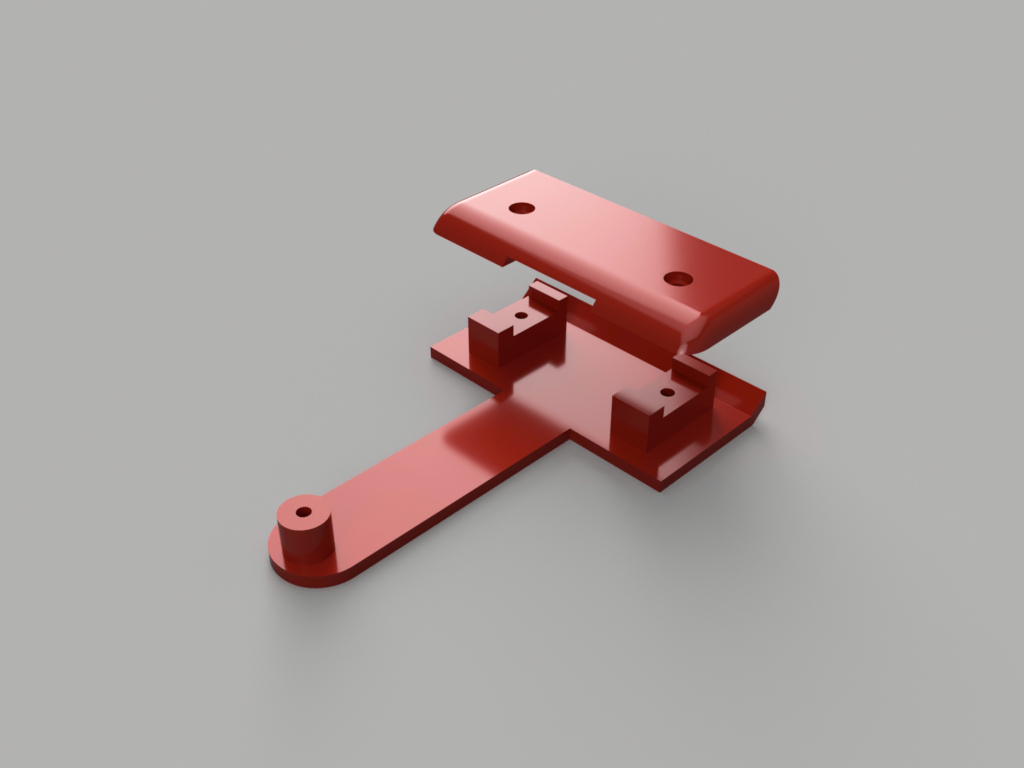
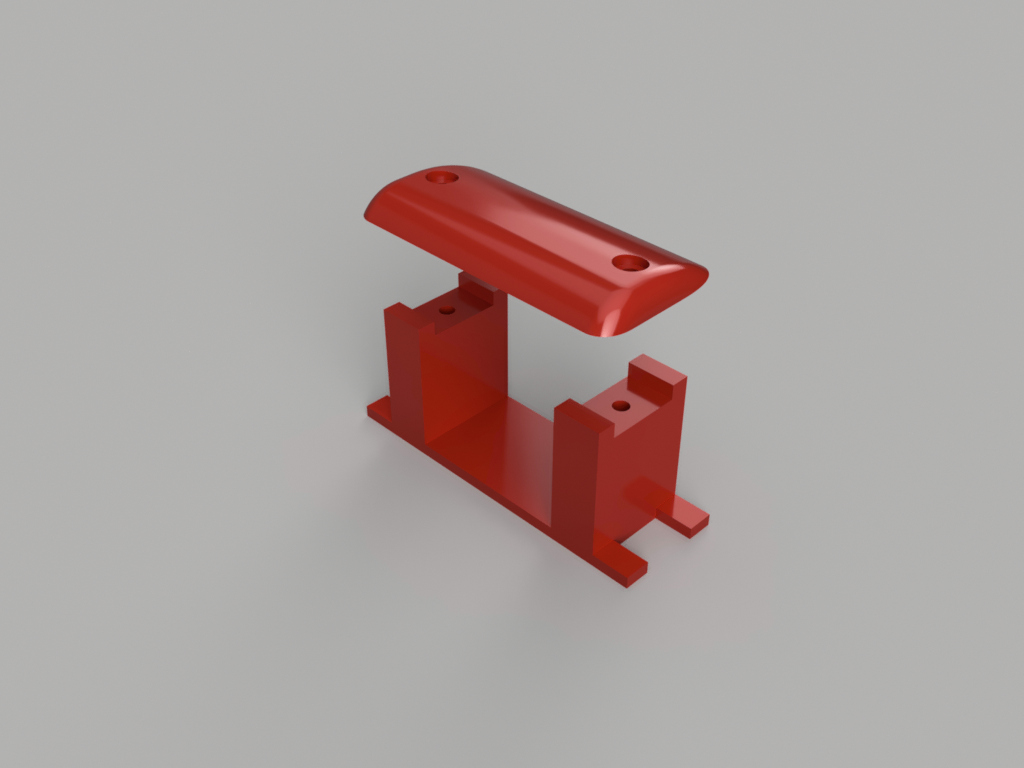
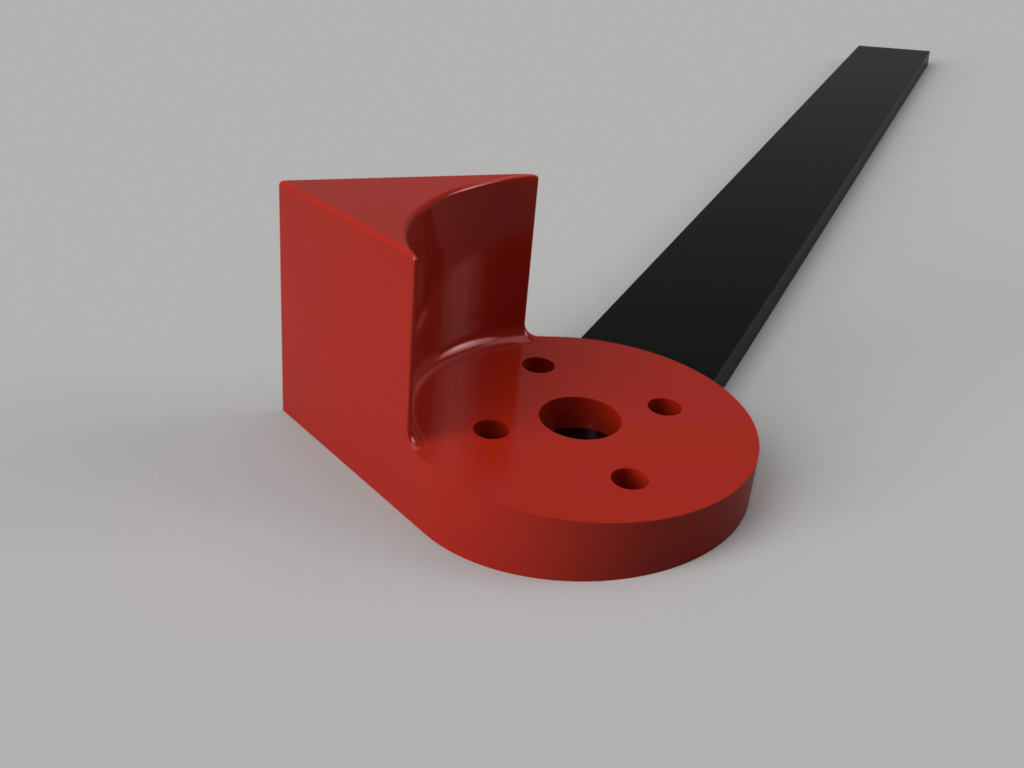
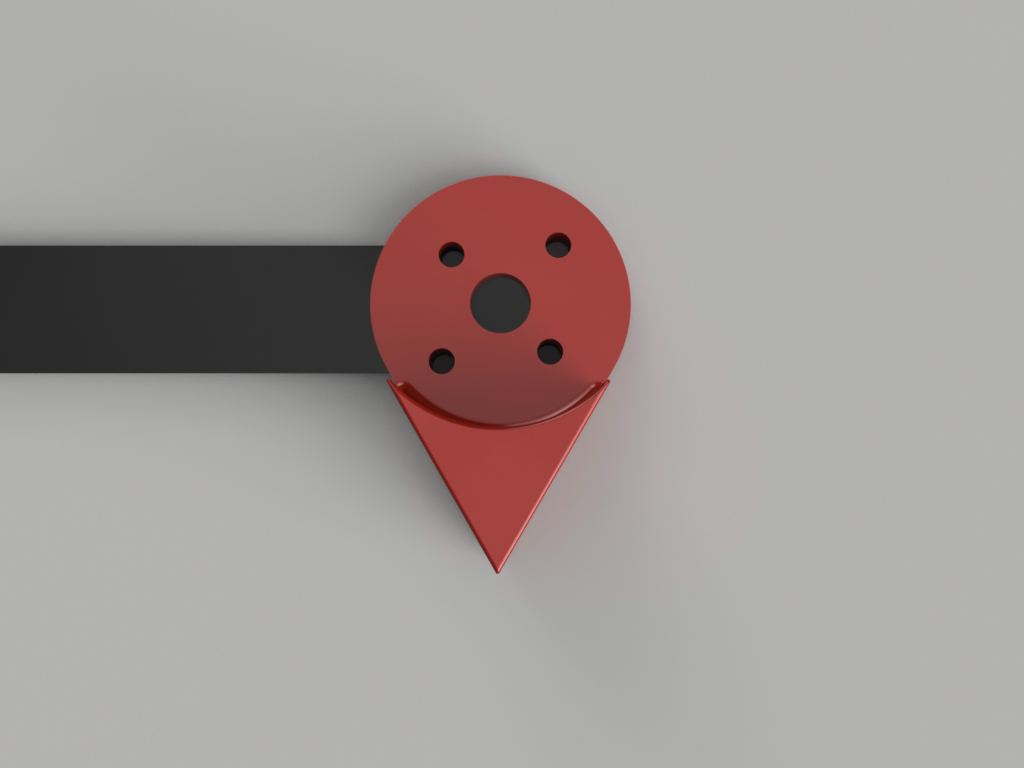
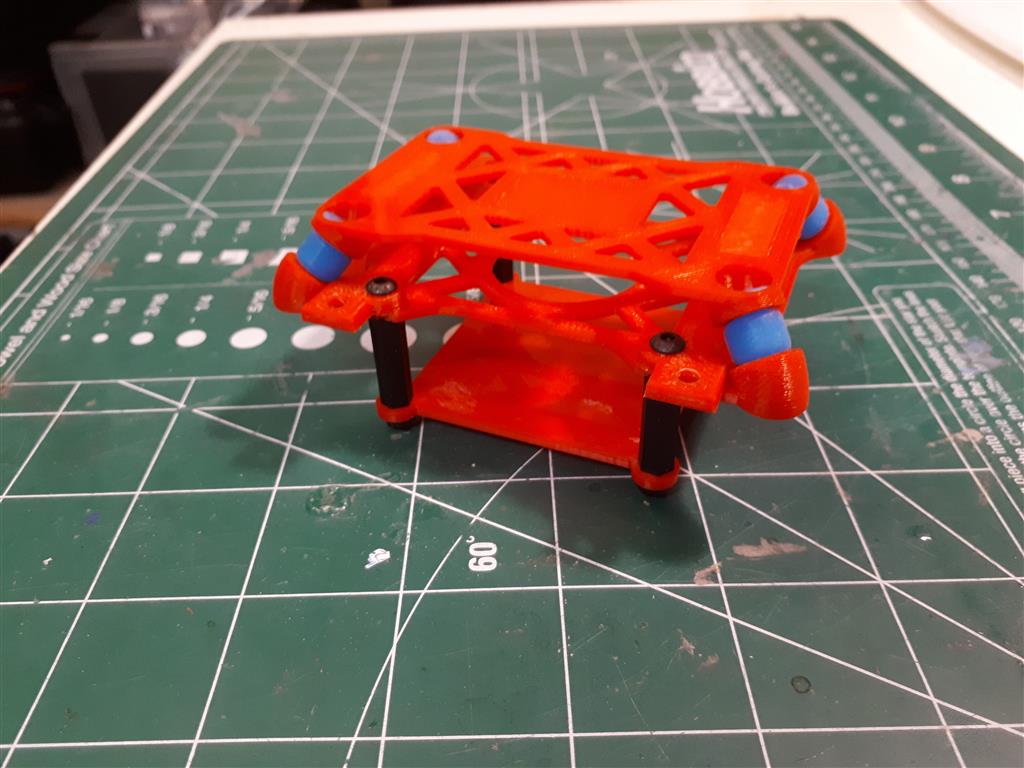
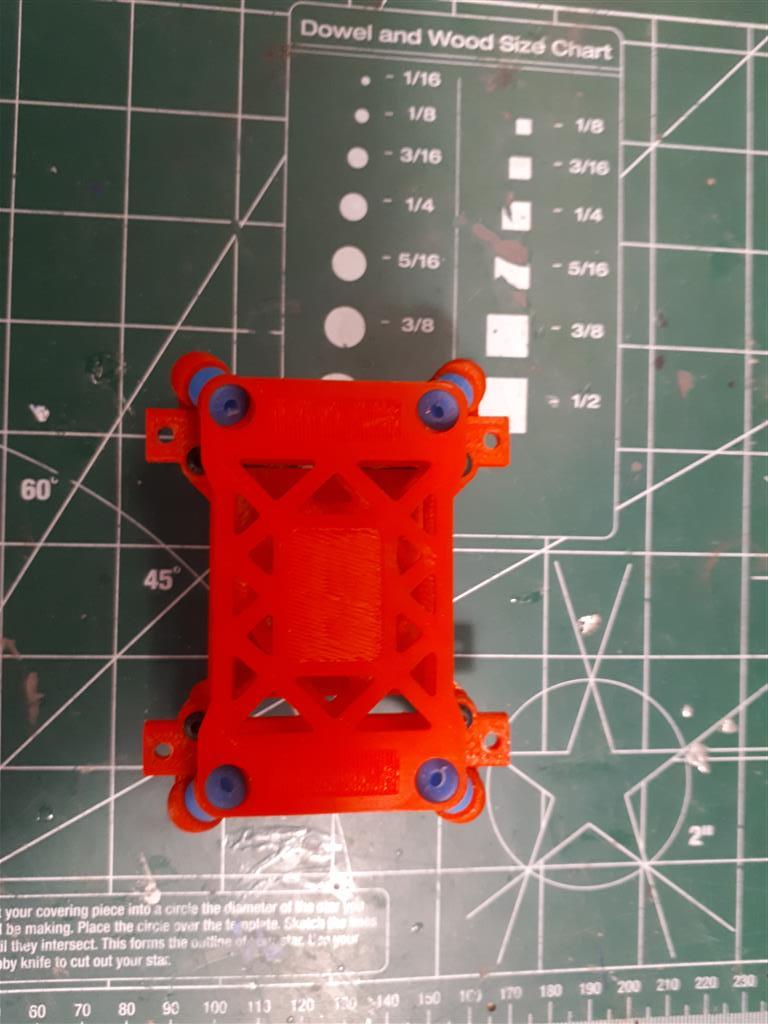
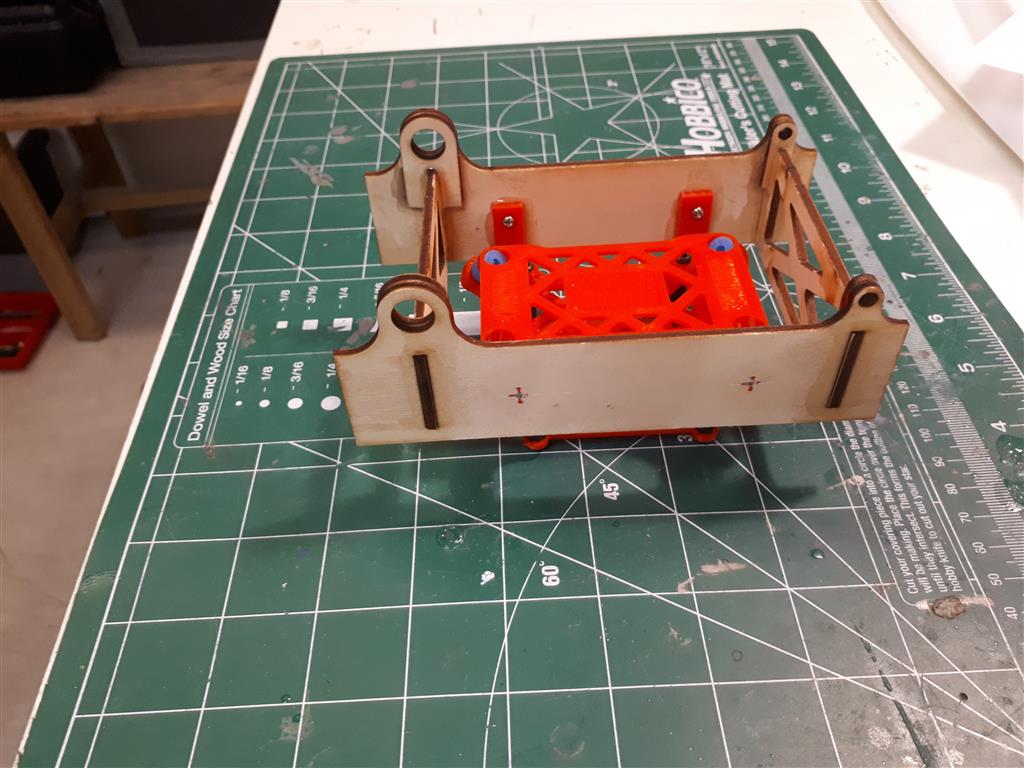
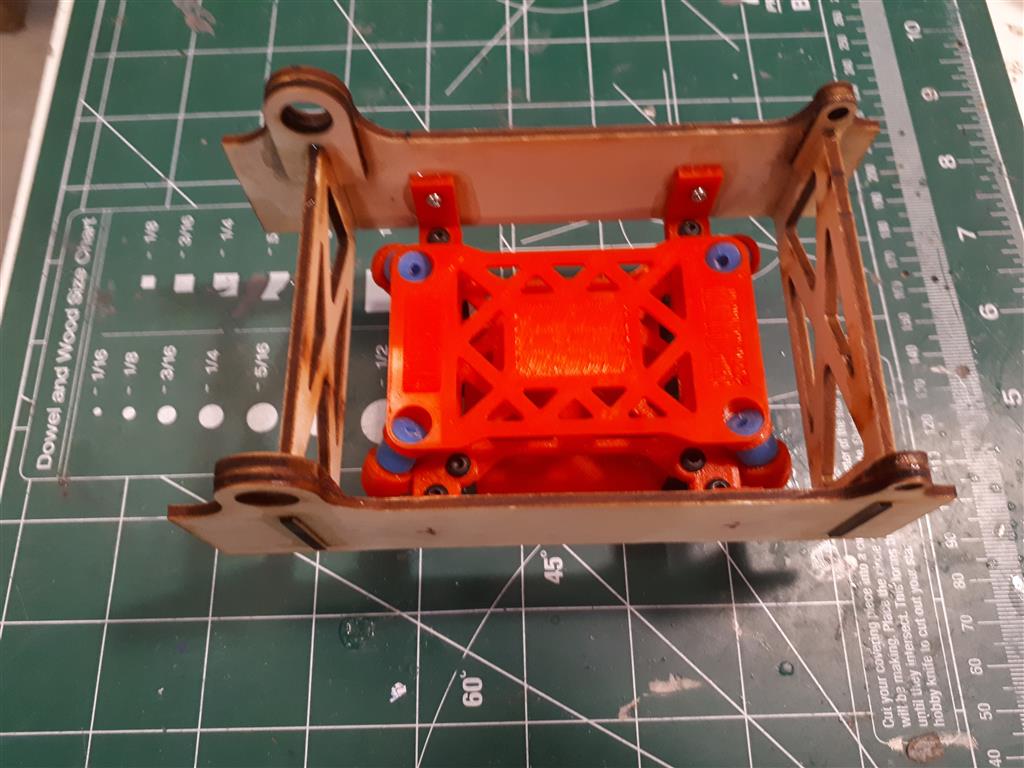
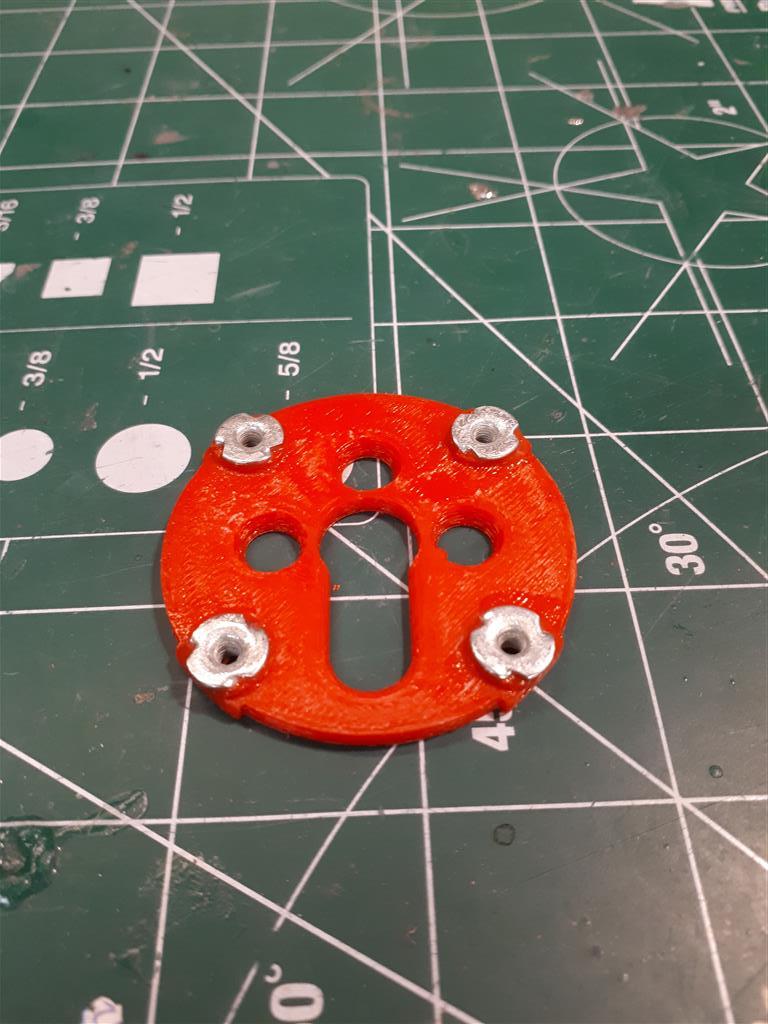
A few pictures of some 3D printed parts for my MT quadplane. They are all my own design, except for the excellent Omniarc Pixhawk FC mount. This one is slightly modified for fixing to the fuselage bulkhead mounts.
Looks great, Ron! I’m guessing that you have your own 3D printer.
Like the Mozzie, since your forward quad motor mount to the fuselage disturbs the FPV pod area, perhaps you can design a new one that slips over it. In my build, I kept that area open for all the existing 3D pod designs like these and this.
Regarding the forward quad arms obscuring the fit of the FPV mounts, I am already on the case I have designed one that will fit over my fwd quad arm fuselage hard points. Coming soon
Hey ronsand
Printa are looking good.
I like 3D printers they make complicated parts so easy…
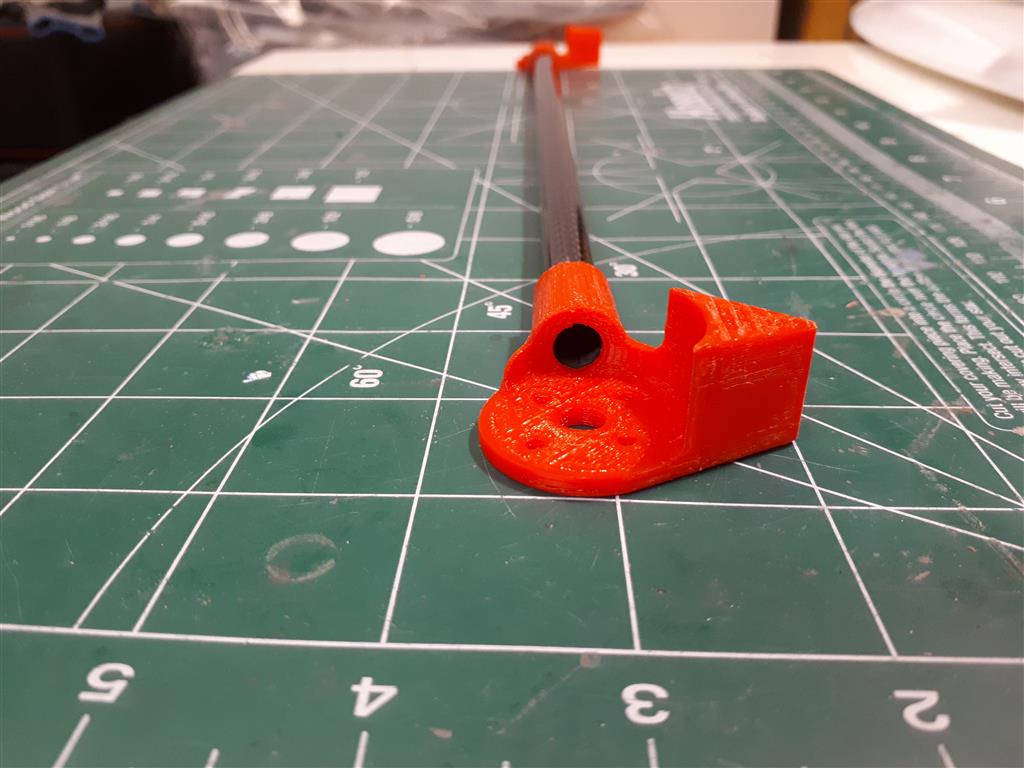
Just one thing i wanted to make you aware of with the quad motor mounts you made with the CF tube insert, and that is that we tried the same design, but the 3D parts failed in front of the tube from fatigue after a few flights due to the vibrations of the prop/motor. Note these vibrations/load changes occur even on balanced propellers as the prop swings over the arm there is a pressure increase in between the arm and the prop. This is even more pronounced when the prop is close to the arm. You might get a few extra flights out of it with extra infill, extra print or better materials, but I’d expect the fatigue to occur regardless. When it does fail it will at a minimum kill the prop and pull out some wires… plus whatever gravity does when the plane comes down if it happens to be in flight. I know the feeling.
Thanks for the feedback Sam, PerthUAV’s endeavor in the UAV world is really inspirering
I will take note of your experience with an similar motor mount design and I might run some tests on the part before putting it to use. I also have some ideas to improve on the durability of the part.
I might also end up CNC milling something from carbon with aluminium clamps… or just get something of the shelf
Jeff, I just finished a 3D print and was in doubt to print the motor mount if it´s safe, what material you have the failed? I´m using ABS and want to try nylon but printing non critical pieces yet, thank´s for share your good and bad experiences guys.
It depends on which version you are printing. If you are printing the Mozzie quad motor mounts then you won’t have an issue. If they are the same as ronsards ones with a sideways entry for the tube, you probably will. If you a using a mount, even a 3D printed one where the motor is mounted on top of the tube, like Greg did you should be fine, as all vibration/bending moment/shear forces are transferred directly to the CF tube. Nylon s definitely better than ABS or PLA, but we no longer use 3D printed parts for things with mechanical vibrations if we can avoid it. (our forward motor mount is the only 3D printed part like that and works fine on a pusher prop as the forces/vibration is absorbed by the fuselage instead)
To be honest I’m not sure why people are using tubes for their quad arms instead of a flat 15mm wide 3mm thick CF bar. Is it because it’s not readily available and hard to source locally?
So without wanting to go raving on again why one should use the flatbar, there’s a few things that make it much better than tube which I’ll post here before adding to our own docs as reasons for the design.
Because it’s flat it can mounted on the MT directly with screws, with only a plate on the inside of the fuselage even without a 3D print (the 3D print is very light and rigid when printed on it’s end)
the motors can be mounted on the flat bar directly, the forward tilt can also be achieved with washers without a 3D print
mounting it with screws on top instead of recessing it into the fuselage does not weaken the fuselage foam, or create pressure areas where the foam will break on impact
mounting it with just 2 screws means you can remove the quad arms for normal winged flight (don’t forget to change the forward prop pitch)
The flat bar provides a flat surface to mount the ESC’s on, in the airflow of the prop wash for cooling
it’s simple to wire up, solder and fix
the frontal area is about a third of that of a round tube, even with the wires and ESC on top.
the tube has a Cd of around 1.2, the flat bar about 0.3 imagine the tube is the equivalent of 12 times as high as the flat bar when thinking about it’s aerodynamics.
the flat bar flexes on impact and isn’t as rigid as the tube, resulting in less damage from impact to the fuselage (it’s like a leaf spring)
It’s flexing adds to the yaw authority of the QP in quad mode, if configured as a H quad.
Lol looks like a went raving on after all
Regards
Sam
Cool, thank´s, interesting to learn advantages and disadvantages of 3D print, drone parts, flat bar looks interesting in small proyects but when you go to bigger ones perhaps you have torsion issues?
I have to wait a month for my new esc uffff!!!, disadvantage to live at the world corner ;o
I think provided you have symmetrical lift from a multi bladed prop the flatbar shouldn’t have much torsional load from the motor. In particular my suggestion was for the Mini Talon quadplane or similar build. Larger flat bars are probably going to be much heavier than tubes on larger frames, and probably won’t be stiff enough and flex more.
The second build actually used aluminium flat bar as the quad arms, which was a bit flimsy and bendy, but it worked. I then went through a few weeks trying to get tubes to work properly, with nice mounts etc, even with the ESC integrated underneath the motor etc. but it was so tedious to build and repair, so I went back to the flatbar, and used CF instead, which is significantly stiffer than the aluminium was. I haven’t looked back since.
The intermittent motor issue because of the ESC PWM was in fact way worse to solve. That took a solid working week to figure out, which resulted in me making a thrust test stand, and going through a series of ESC/Motors/props testing every conceivable ESC/PXH setting to find out what worked, and what didn’t. It being intermittent and not happening under load made it a very annoying, blowy and very loud week of testing! (this was two weeks before the OBC!)
Thanks for the insight Sam
I ended up ordering a pile of 3x15 carbon fiber flatbar on ebay so I guess I will go that route.
On a side note I have done quite a bit of demolition testing on the printed parts now and they are incredible strong.There is no sign of layer delamination, even when forcing a heavy duty scalpel along the printed layers . They are very stiff and do not snap easily. I use ABS with 40-50% triangular infill, 0,2mm layer height, heated printer bed and a closed and heated printer chamber. I also use relatively slow printing speeds for better layer adhesion.
In any case I take your word for that fatigue due to vibrations, can snap key parts like motor mounts if not properly designed and in this respect I guess is better safe than sorry
BTW Is it possible to have the blheli settings you ended up with?
Hi Ronsard
I saw that, and I think it’s a good move to use the flat bar.
Which motor/prop/ESC combo will you use? The TMotor F80’s? I’d like to see them on a mini talon, they look good and have a heap of thrust on a 5"! I’d try a 6" two blade instead of the recommended three blade to reduce forward drag. (If you need to)
You should be able to find the BlHeli settings for the Mozzie here using the two links half way down the page: http://mozzie.readthedocs.io/en/latest/ESCSetup.html
(I need to improve their visibility in the doc)
You could also just use our versions, but improvements are welcome!
Just a couple of things to check before printing, and that is that the hole layout matches the motor so that the cables come out over the CF bar for routing them back to the ESC. Also that they are in a position where at least two screws have enough CF bar around them to hold the screws properly. 15mm is a bit skinny for the 22 size motors, but it works with a bit of creativity. As a result the motor mounts have opposite hole layouts on either side of the quad arm.
JFYI we used 6x3.5 props without bullnoses for the Mozzie. We found that having a flatter pitch quad prop resulted in less current draw whilst still providing adequate thrust for control. Also helps reduce drag a bit when going forwards. Given the high rotor loading which is more than on a mini racing quad, it can be that the motors/ESC get warmer than they would on a lightweight quad, so reducing the torque with a lower pitch prop and allowing the quad motors to spin faster makes them easily stay within a better efficiency/thermal operation range. Obviously checking their thermal performance with a few test hops before transitioning helps as well.






 I have designed one that will fit over my fwd quad arm fuselage hard points. Coming soon
I have designed one that will fit over my fwd quad arm fuselage hard points. Coming soon