Hi,
I was inspired by Sam (JeffBloggs) and the Perth UAV Club’s conversion of the mini Talon (called a Mozzie) to duplicate their creation of a dedicated QuadPlane. My conversion will be Mozzie-like and copy some of their efforts while differing mostly in the hover power system and use of the stock timber (laser cut wood).
Feel free to add your own build differences here or post questions. This is an open build thread for anyone interested in converting the XUAV mini Talon into a QuadPlane.
Here is a list of my component selections. Many of the choices are from U.S. based warehouses for easier shipping to me. Note that my plan is to use HQ 10x5 props all around. These are inexpensive carbon composite props on par with the older expensive Grauper 10x5 e-prop.
Plane Parts
X-UAV mini Talon Kit - Banggood USA - $55 shipped
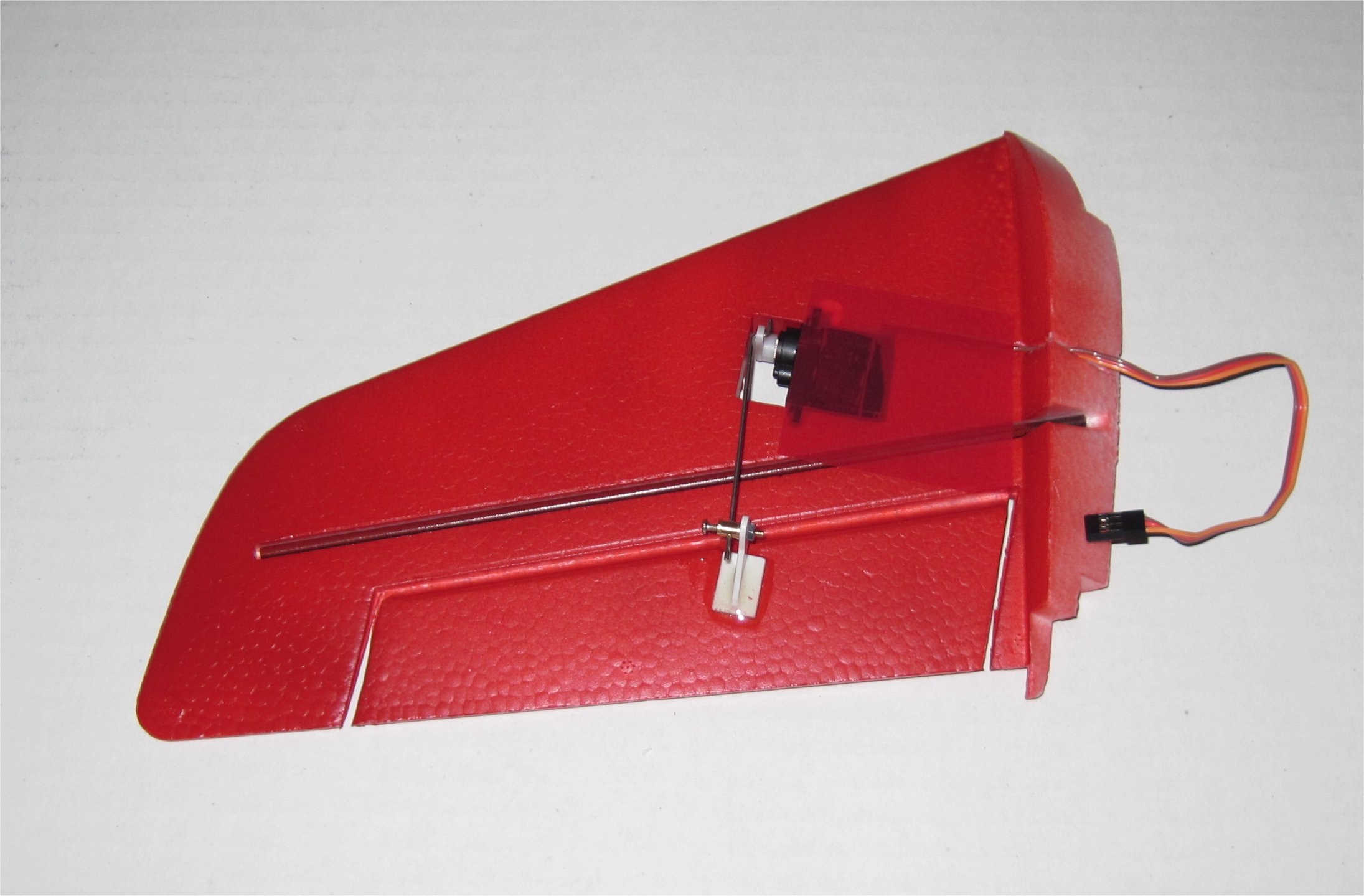
Corona Digital Servo DS-929MG 2.2kg / 0.11sec / 12.5g - HK USA - $5.88 x 4
Cobra C-2814/16 1050Kv Brushless Motor - RC Dude - $38.
ZTW Beatles 40A Brushless ESC - BuddyRC - $15.
HQ Prop 10x5 E Carbon Composite Props - RTFQ - $7/pr.
Aeronaut 10x8 Black Electric Prop - Atlanta Hobby - $9.
NACA Style Inlet Duct Set - HK - $3.
3-Blade Propeller 9x4.5 Black (CW/CCW) - HK - (CW/CCW) (2pcs) for $1.90
Multistar High Capacity 8000mAh 4S 10C Multi-Rotor Lipo Pack XT90 - HK $44.
APM Parts
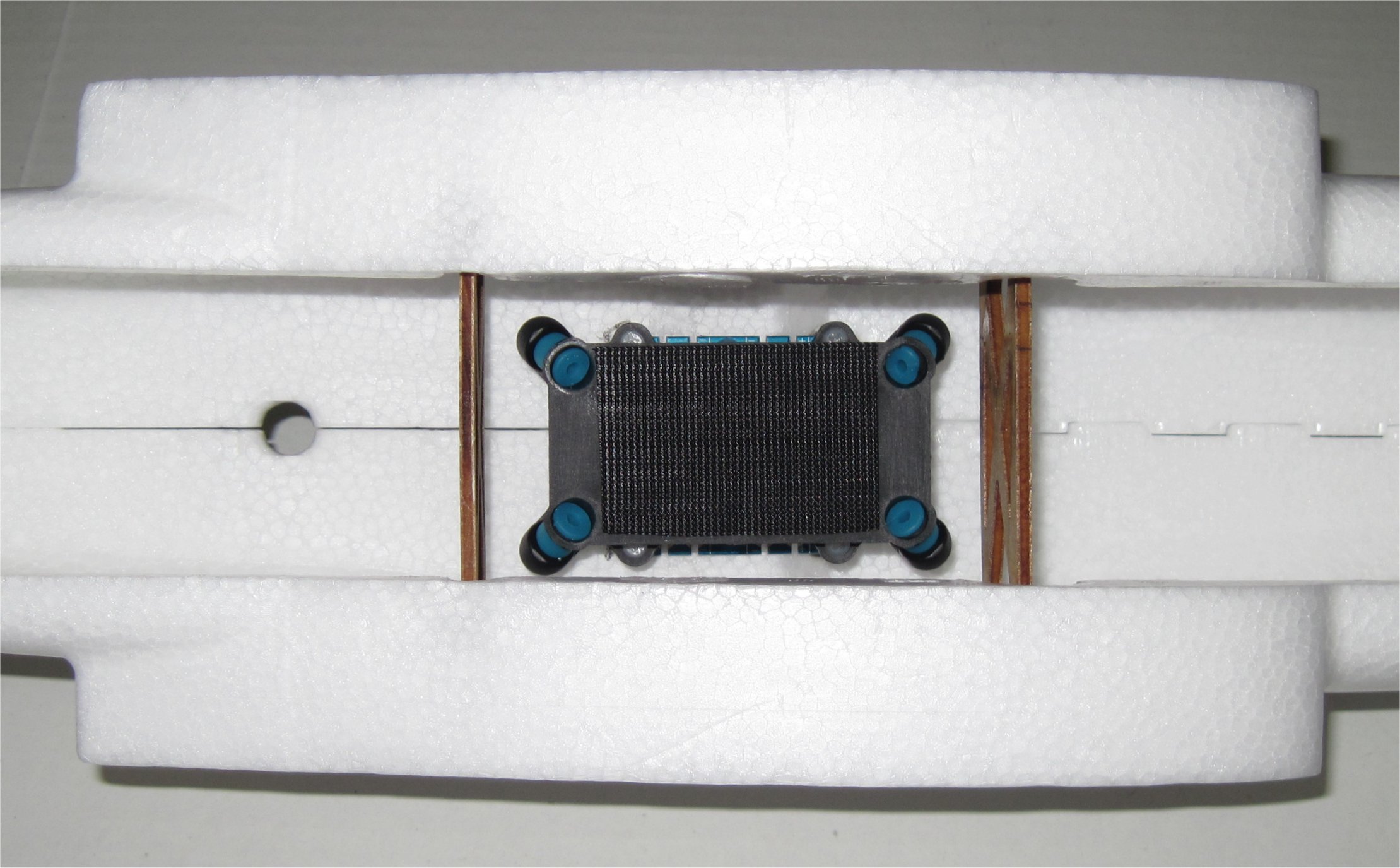
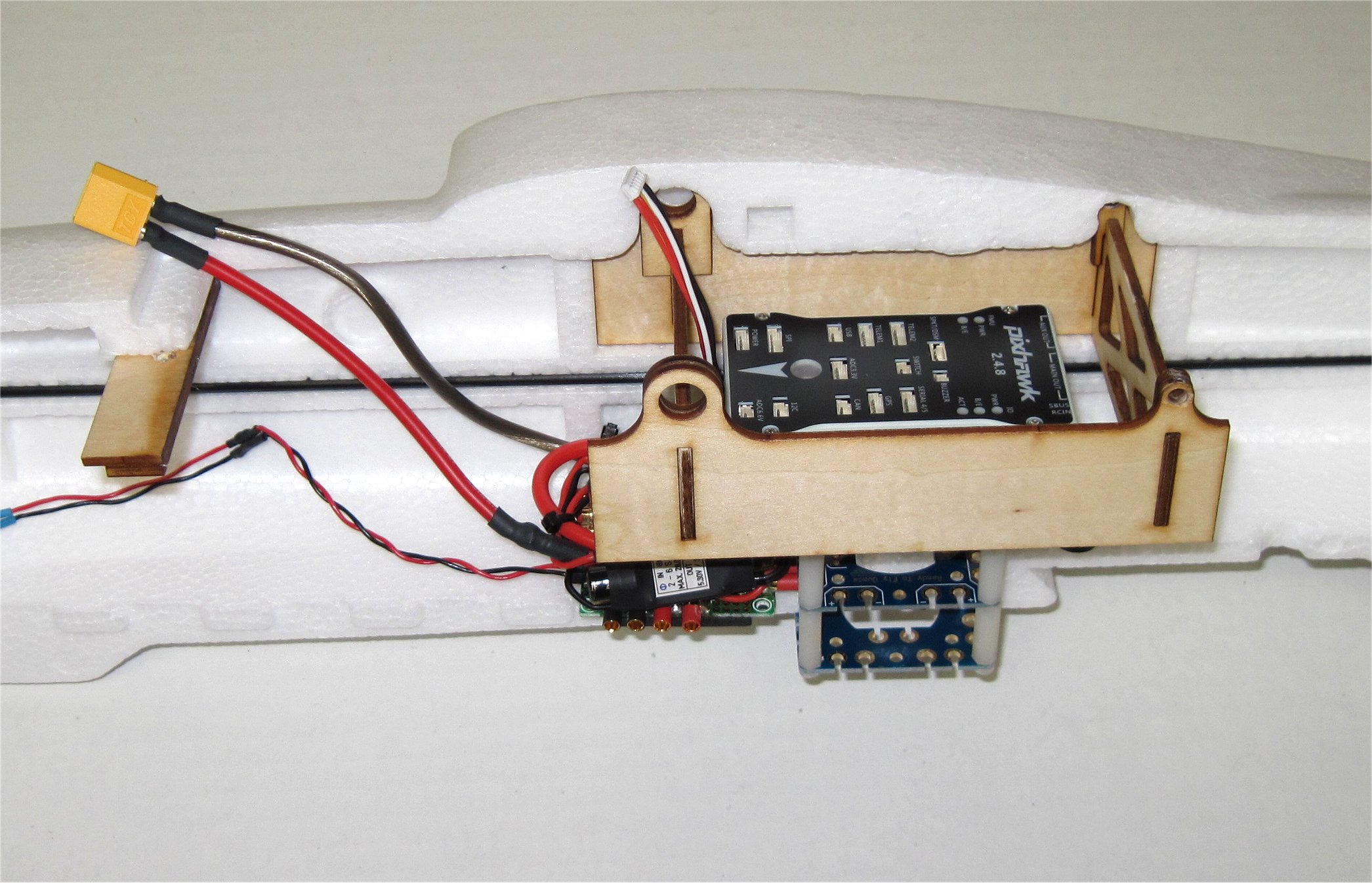
Pixhawk v2.4.8 on eBay
M8N GPS on eBay
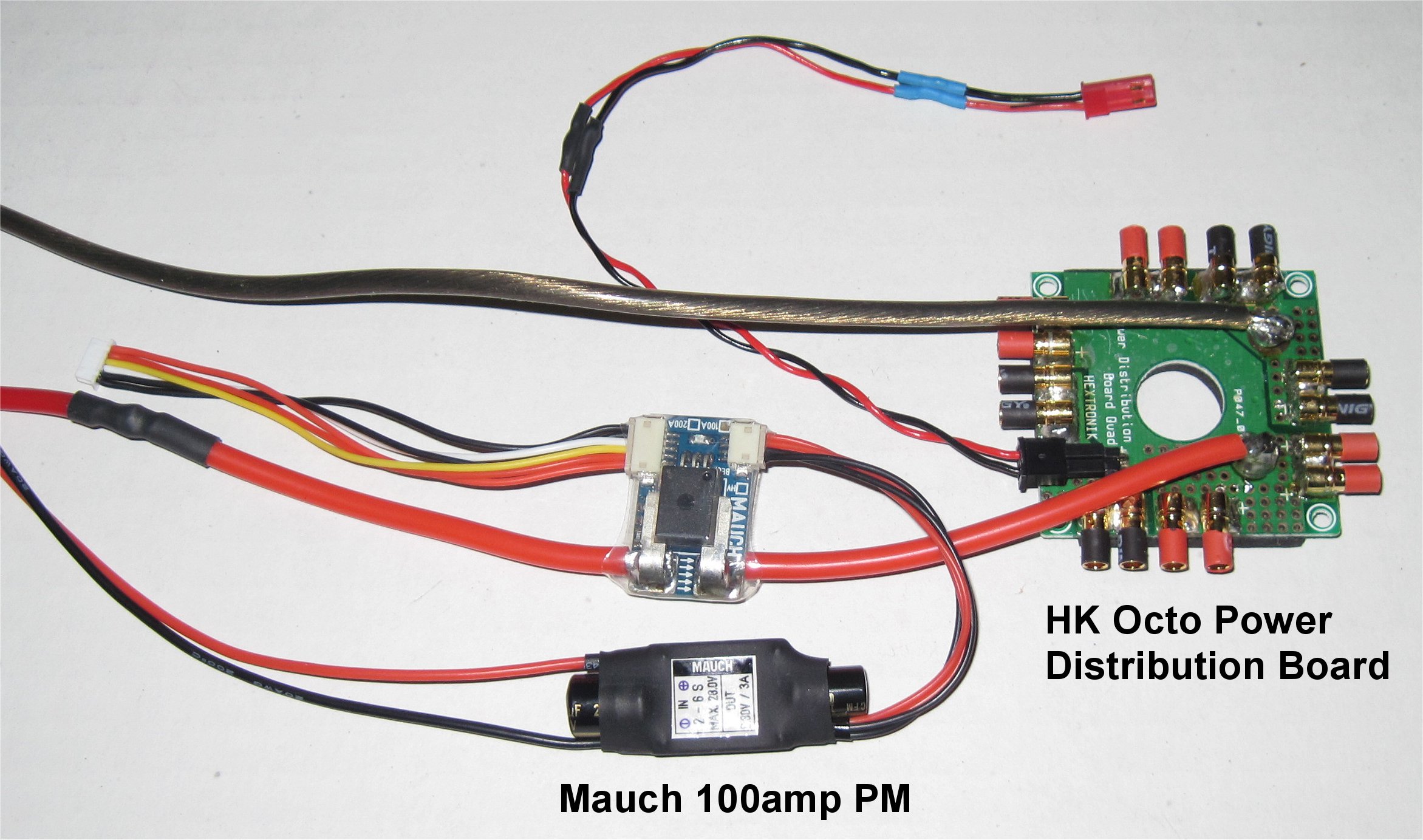
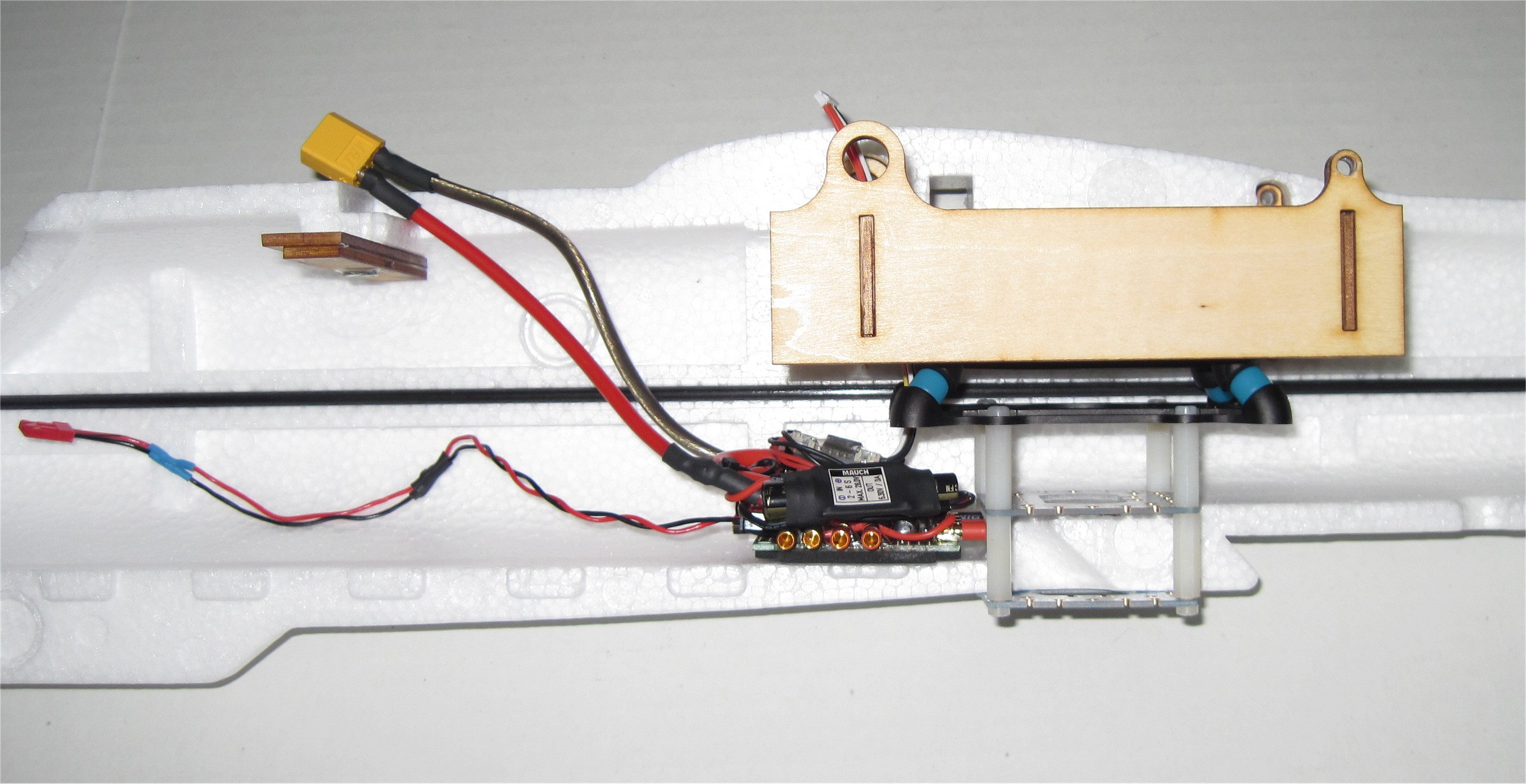
Mauch Power Module - from Craft&Theory
Mauch Company in China - has distribution to many continents
Hobby King Octocopter Power Distribution Board - $5.
APM Flight Controller Damping Platform - 45mm Mount - HK - $3.35
HK Power Distribution Board - 45mm Mount - HK $2.20
RTFQ Power Distribution Board - 45mm Mount - RTFQ $2
Quad Parts
DIY Round Tube Motor Mount (12mm Tube) - HK USA - $1.80 x 4
Carbon Fiber Tube (hollow) 12x750mm - HK USA - $5.11 x 2
SunnySky V2216-10 KV900 Motors - BuddyRC - $16 x 4
Velotech Magic Multirotor Speed Controller 30A with SimonK Program OPTO - BuddyRC - $8 x 4
HQ Prop 10x5 E Carbon Composite Props - RTFQ - $7/pr x 2
Optional Parts
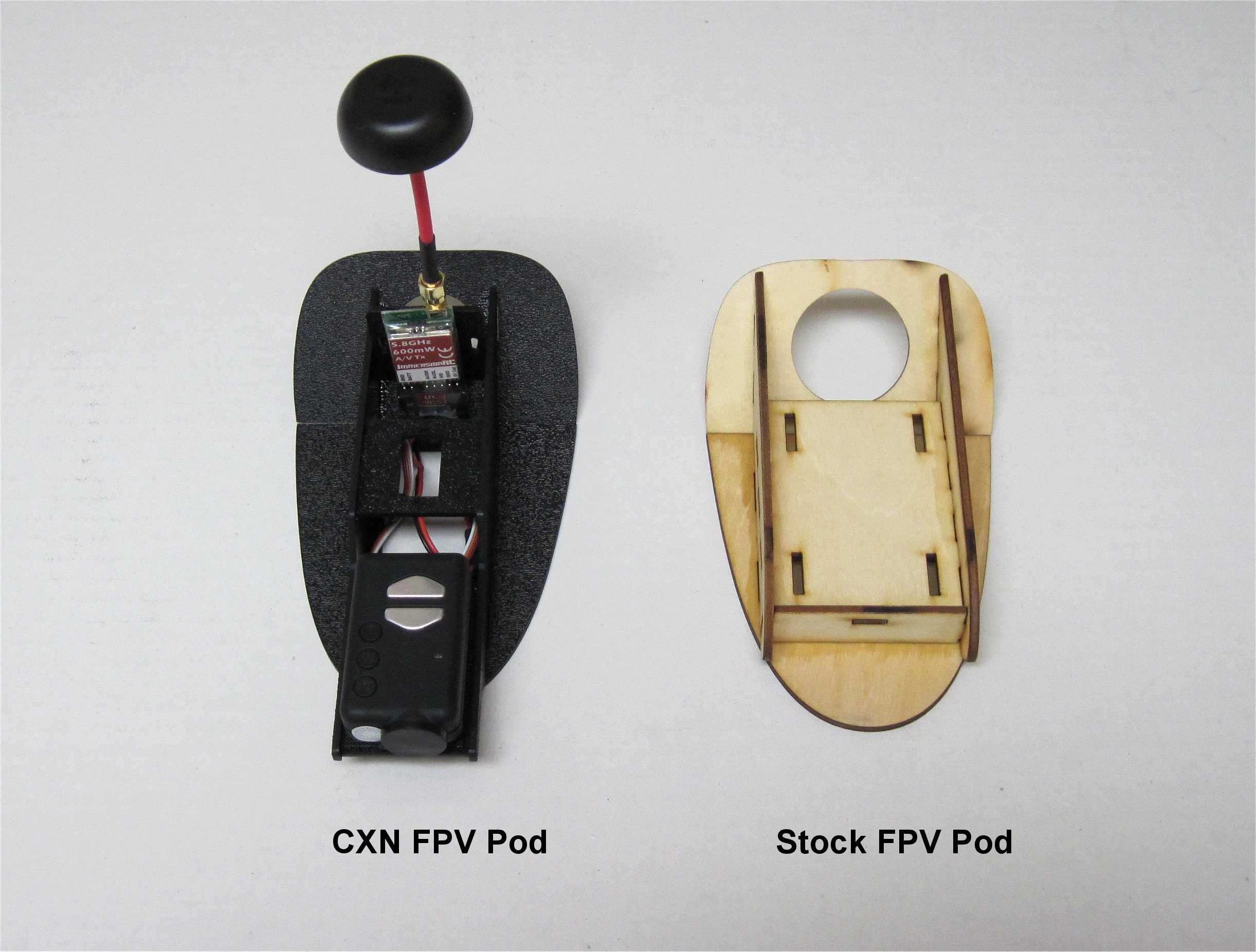
CXN - Mini Talon FPV Pod - RMRC - $25 (optional)
Interesting Links
RC Groups thread on mini Talon FPV
Prop Chart Data for Cobra 2814/16
Mark_Q’s Build #2 Wiki
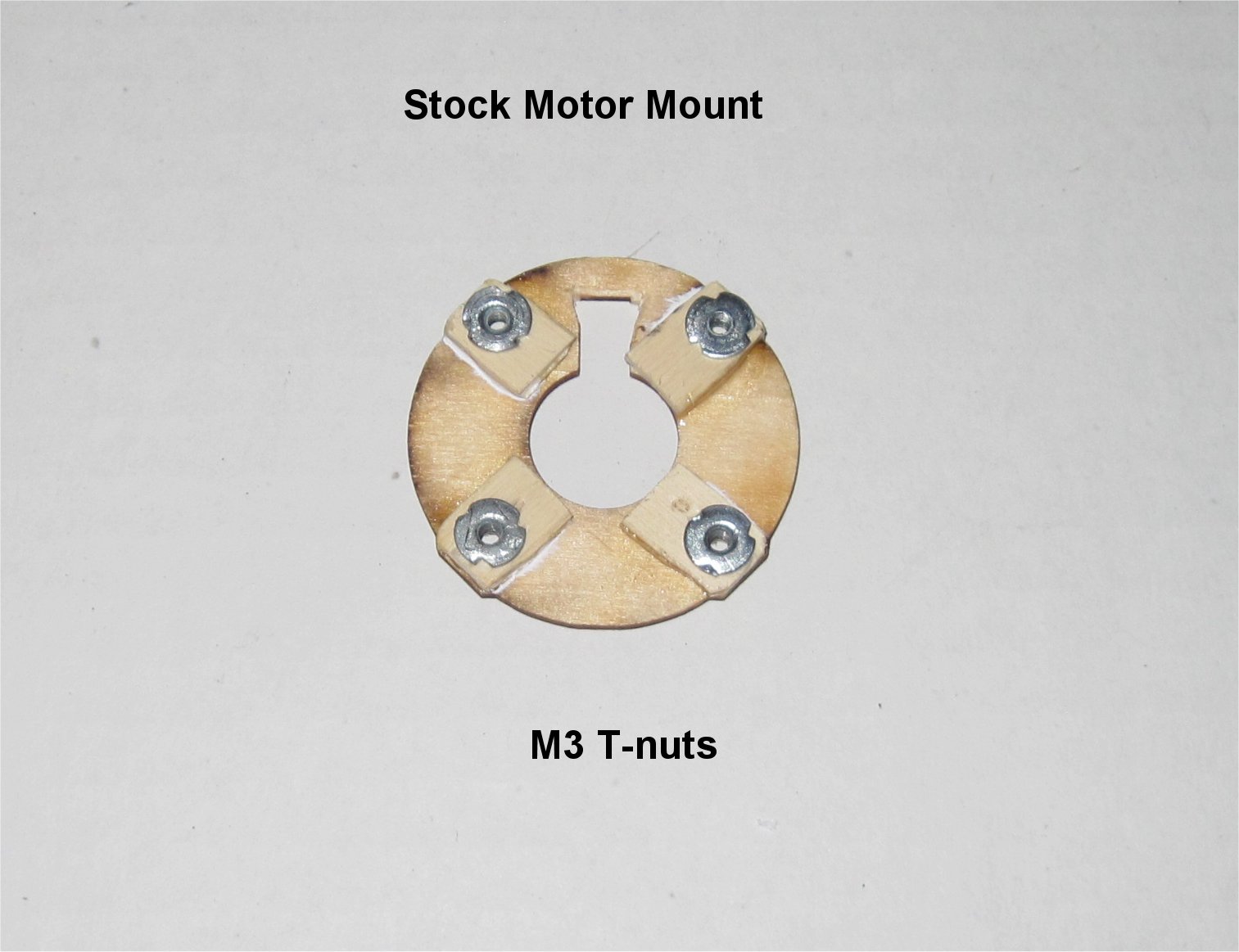
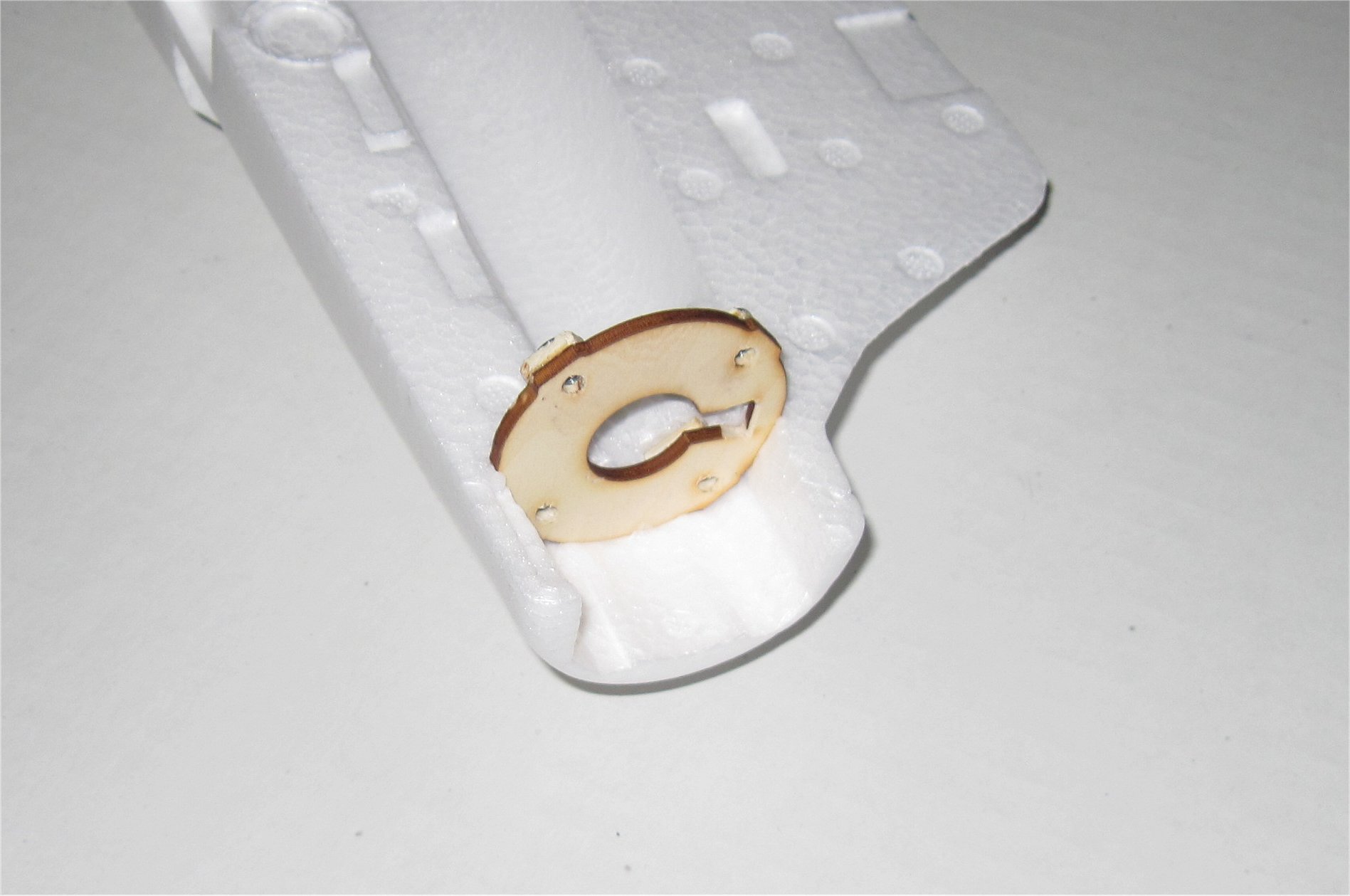
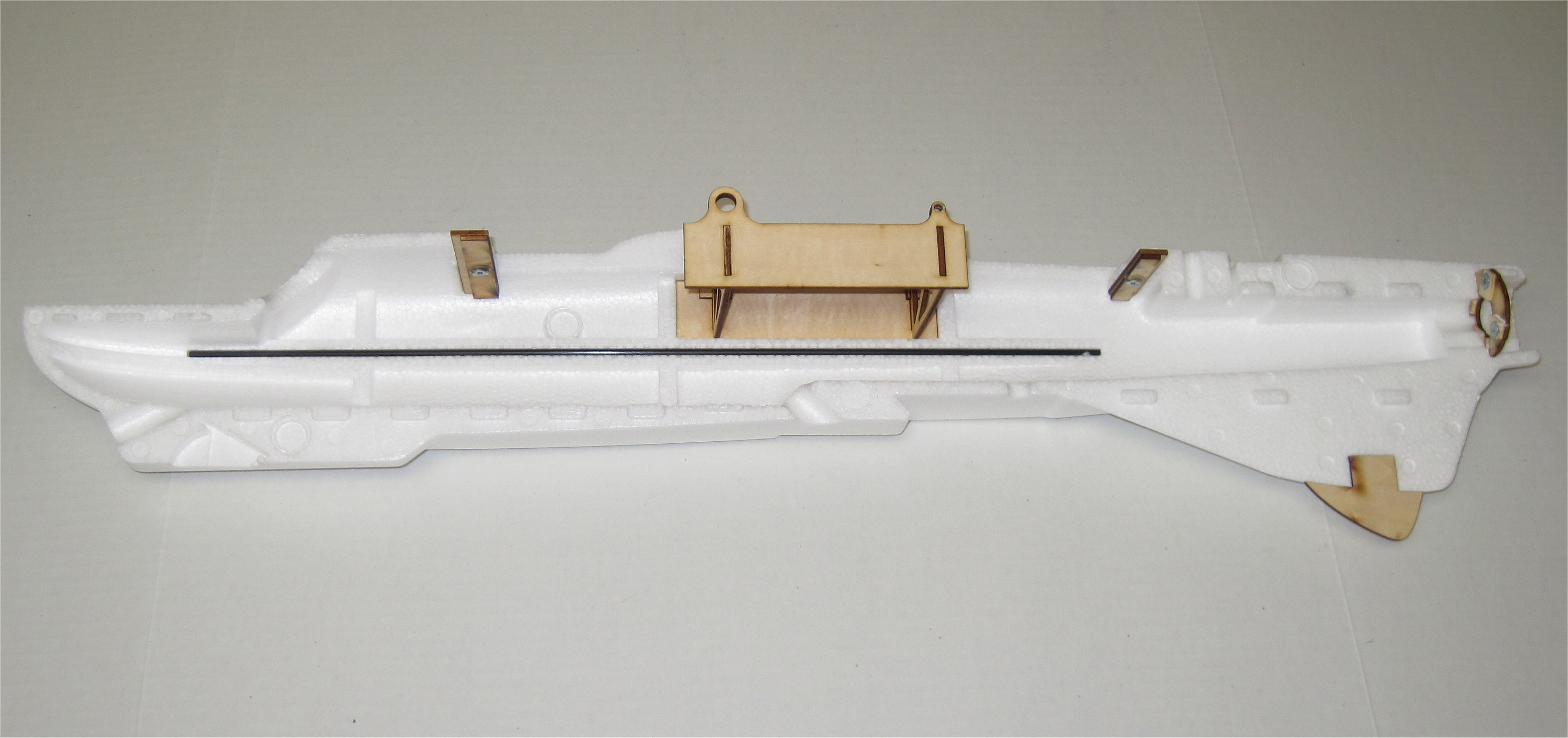
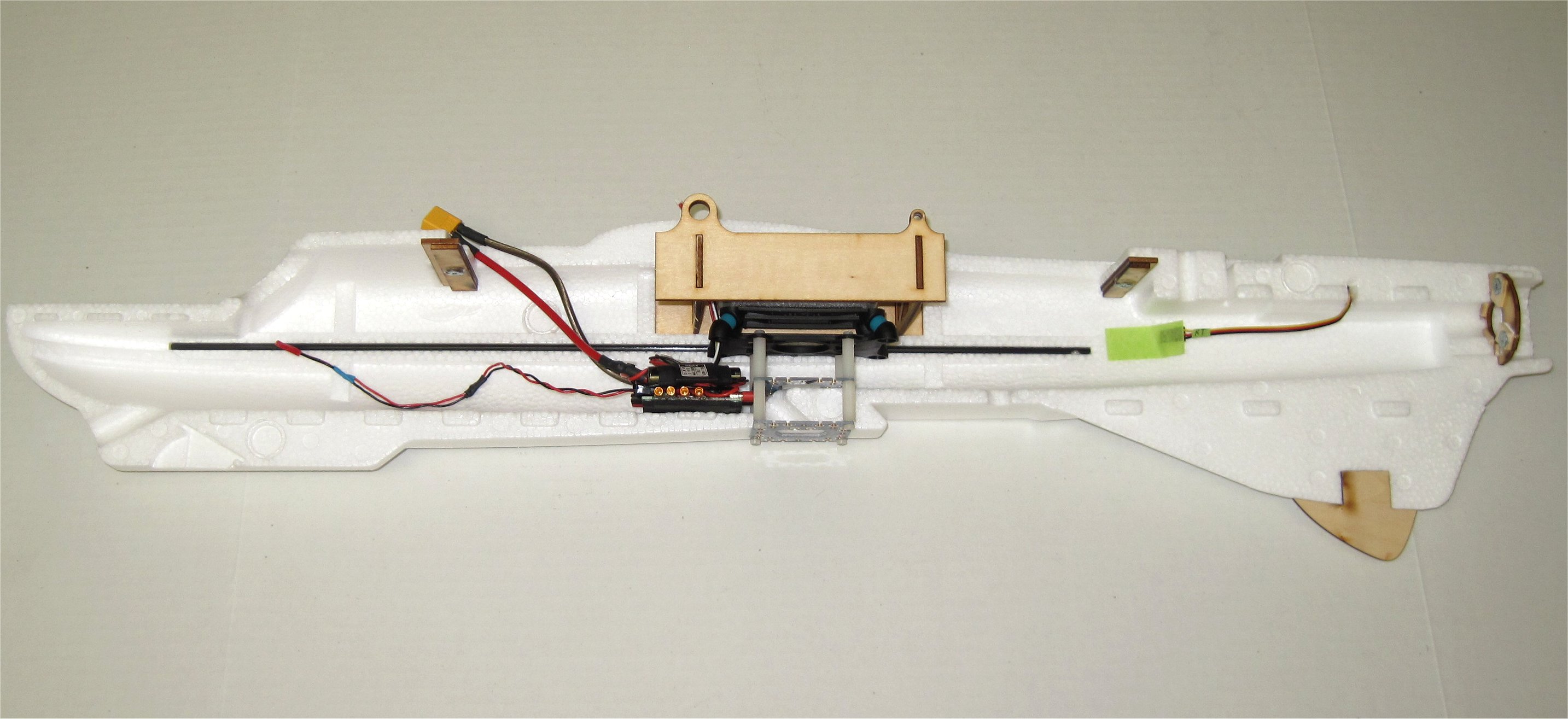
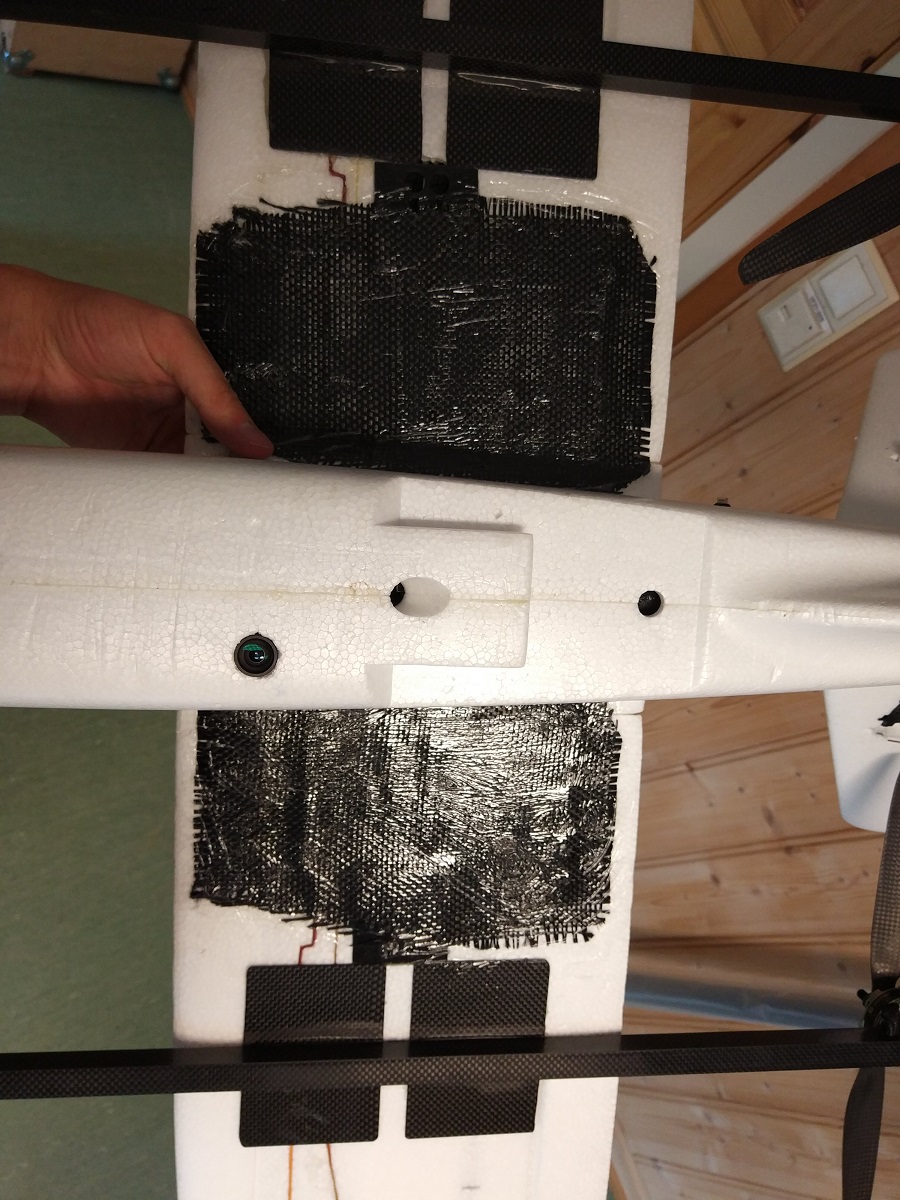
So far, my only modification has been to use M3 t-nuts for the plane motor mount and main hatch. I glued parts into one side of the mini Talon but won’t glue the halves together until I get a good feel for all the component placement.