Brilliant stuff Greg!
That’s the way to fly a Mozzie!!
From memory I did tell you to set the Q_ Assist fairly high until you find out what your actually stall speed is, given you didn’t crash having a higher speed setting didn’t hurt at least. I’d gradually decrease your Q_Assist until you find the stall speed out, or avoid flying slow. What size and brand forward prop do you have on it atm, forward amps seem a bit high?
Thank you for the help! I’m using an HQ 10x5 prop. I’ll try setting Q_ASSIST_SPEED from 17 to 16 next. What are the characteristics of a MT stall? Does it just drop the nose until it picks up speed or does it spazz out?
It was a pleasure to help…and interfere!
Thx for the feedback.
The Talon paticularily likes to tip stall on banks, which results in a
spiral dive that needs a kick in the rudder and some aileron to recover
from. The short lever arm of thr tail doesn’t help much. Just have Qhover
handy to bail out of it otherwise.
If you’re running the same Cobra motor we’re using I’d expect a significant
improvement in forward current with a higher pitch prop. We use a 10x8
Aeronaut. I’d expect you to get around 7-8A at the same speeds with your QP
version. The MT only needs about 400g of thrust to overcome drag in cruise,
but that level of thrust needs to be at the correct pitch speed.
Just to compare the magnitude of efficiency with our Tri-Tiltrotor-VTOL “Mozart”:
( Tiltrotor support for plane )
Approximately 2,5 kg, with 4s 3700 mAh Hover 35-45 Amp,
FBWA: 10,5 Amp at 15 m/s , Stall little bit<9 m/s
(3x DYS BE2814-700kV, Propeller 12x6 front, 12x5 rear)
Great job Greg !
Interesting the way you mount the tubes for the quad motors.
At low speed you should not have too much drag but obviously under the wing the drag would be much less.
Anyway a really nice quadplane !
Guys what is your opinion about a 1718mm Talon quadplane ?
My goal is to build a quadplane that should fly for at least 80 minutes with 400 grams payload but with a low cruising speed , low as much as possible , 10 - 12 m/s would be great.
I have two candidates , the E-Flite Opterra a 2000mm flyng wing with 66dm2 wing area or the 1718 Talon, with wing extensions it should have a similar wing area.
I already own the Opterra but the space inside is not so much so I’m seriously considering the 1718mm Talon.
rollys , I already saw the Vertical Tech. products , I do not like it much , a bit because of the cost but also because with a flying wing you need long tubes to center quad motors with CG of plane, is one of the elements that make me think I will drop the Opterra quad.
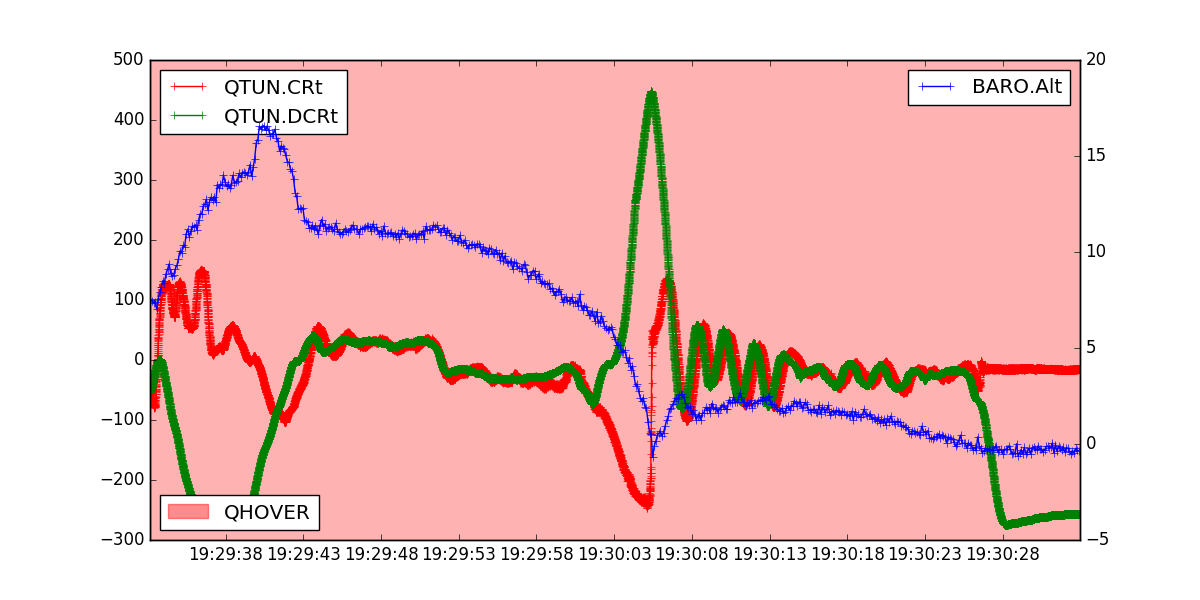
I just did a flight with my MT quadplane. On the second landing, I had a slight mishap, because it would not stop descending in QHover mode and the MT hit the ground. Could someone have a look at the log.
From what I can tell, it looks like the throttle was all the way down, but I remember pushing it all the way up to try and stop the descend. After it hit the ground, it bounced up in the air again and flew like nothing had happened.
Was it caused by dumb thumbs or something else?
Thank you!
Congratulations on your first flight! I’m glad it wasn’t damaged. QHOVER mode uses the BARO and greatly reduces the throttle stick effect. Perhaps your BARO is not covered with open cell foam? It could also be a pressure change based upon wind or even thermal layers at the field.
I tend to use QSTABILIZE mode for initial flights, then add sensors like BARO and GPS with the other modes. If you retest, remember to do it higher up and then be ready to switch to QSTABILIZE if something goes wrong.
Thank you, Greg! I already did about 10 flights with the MT. I posted another video earlier in the thread, but the old tracker was shaking badly, so I do not blame anyone for not watching it.
The FC is a RTFhawk in its original case. With foam and all. So the baro should be well covered.
I always test new vehicles like you suggested, from simple to complex.
I first thought the lipos might have been empty, but since it bounced right up again and kept hovering (lipos also showed over 50% charge after the flight), I now think, I might have been descending to fast right through the propwash. In QHover there was simply not enough power fast enough to keep it from hitting the ground.
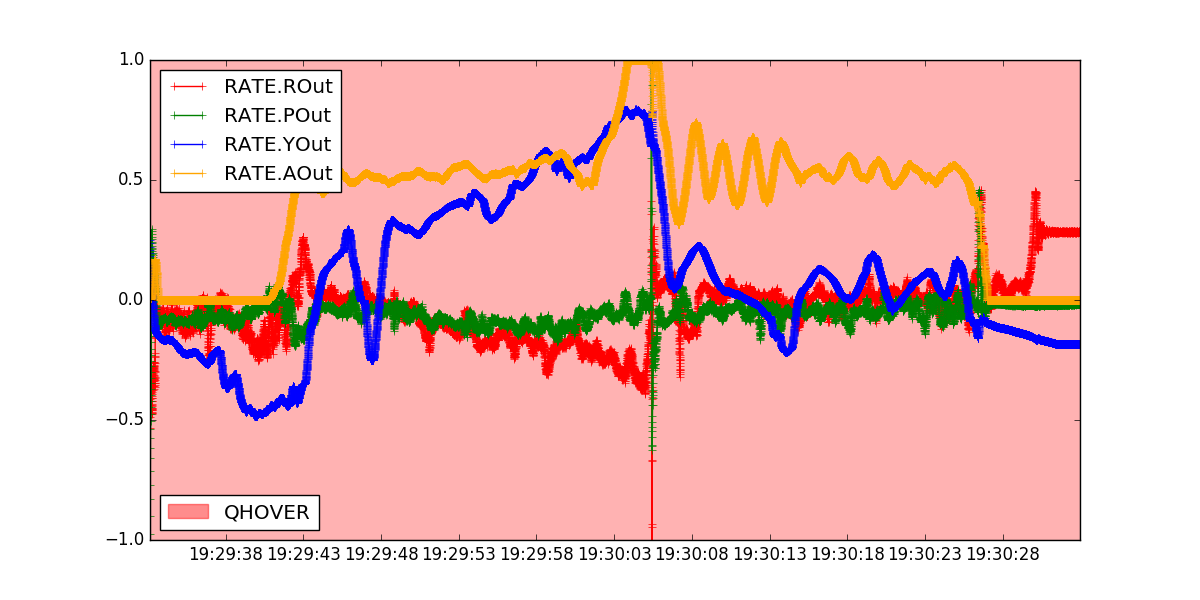
the log shows that it wanted to climb, but it prioritised stability and yaw control, leaving not enough power left for climbing. Battery voltage was getting a bit low (down to 3.3V/cell) and it was still trying to correct yaw from some yaw stick input in the last couple of seconds.
Hi Sebastian
Looks good apart from the rough touch n go in the end.
What QP propulsion setup do you have? Have you checked quad motor temperatures after 2min or so of hover?
Warm motors lose power sometimes, so having a marginal propulsion setup or battery might push it over the edge.
Also regarding the yaw have you got it setup as a H Quad? That works best on a MT as yaw can be pretty sluggish, it’s necessary to have enough thrust reserves to yaw and maintain lift. (1.8:1 or higher is good)
I see you have the quad motors inverted and was wondering if that was to keep the quad props out of the wing airflow?
@tridge Thank you for looking through the log. I really should buy new batteries. Perhaps I should have bought them earlier, to avoid this hard touch and go. I also got a bit to confident and let the descent rate get to high.
@JeffBloggs
Thanks for yor reply. A lot of what I have read about your Mozzies inspired me to build my Quadplane. I just could not bring myself to use racecopter motors for lift. It just looks to cool hovering around.
So the lift motors are Tiger Motor MN2213 950kv (the anniversary bundle) running on 4s
with 9x5x3 Graupner E-Props.
ESCs are Flycolor 30A with blheli.
The motors get warm, but not to hot to touch after 5min of hover.
My neighbour borrowed my infrared thermometer to check on his bees, so no hard numbers right now
I had it setup as X quad at first, but it was totally uncontrollable in yaw, so I changed to H quad. Yaw control is still weak, though. It also wants to yaw left on take off and right after transitioning back to hover. I checked the motor alignment and all seems straight on the bench. Perhaps there is something going on under load. I will tie the MT down and run the motors to check this.
I mounted the motors inverted for two reasons:
The tips of the rear props run under the wing. From tilting the thrust angle forward (motors backwards in my case) like you suggested, the distance between prop and wing gets bigger this way, while it would get smaller, with the prop over the wing.
The plywood motor arms are 35mm wide and I wanted to avoid loosing the thrust and causing vibrations, by blasting the propwash onto the arms.
The drawback is the low ground clearance of the props, especially at the front.
I will order new batteries and try again.
Nice Sebastian!
Makes complete sense to put the motors upside down for clearance to the wing and to reduce thrust losses from the prop wash.
With the propulsion setup are you using this?
If so from what I can tell on there they only do 400g thrust on 4S? So even with 9x5x3 props you probably don’t have enough power for good control, especially when yawing? What’s your all up weight? The 2206 Cobra’s we fly with on 6x3.5 props are doing 1kg thrust each…
I think T-Motor recommends 400g of AUW per motor. Ecalc has no numbers on this motor, but using values from an Airgear 350 motor and changing the kv to 950, it should be around 1.3kg of thrust with the Graupner props. AUW of the MT is 2.2kg.
Yepp, banggood messed up the translation.
I smile everytime I read: “bitte drucken um wieder auszufahren”, when leaving the app.
Yeah I saw that ecalc hasn’t got any numbers on that one. They have on the MN2212-950 though which is fairly similar.
1.3kg per prop? If that was the case then you had a battery issue. It should handle much better than that without saturating the throttle outputs. Can you do a careful thrust test on a scale? Just need to tie a brick under it and stand clear. This will also show up your battery performance btw. if you do it to a half or less charged battery.
I am pretty sure my batteries are crap, I just thought two of them in parallel could hold up. I now have two Multistar 8000mAh 4s packs on order. I will not risk to fly the MT with the Zippy compacts anymore.