On Copter, I had gotten used to setting flight modes (like RTL) on a separate switch from my Taranis 6-position knob. I missed that feature on Plane. From your comment about “on its own switch”, I wonder if the feature finally arrive in v3.8.0 and I missed it?
NP Greg
Dunno if you can set up a mix on the new 3.8 to do a Qhover, but you can on the Taranis. Just set the qhover switch to go max or min PWM and select that as qhover in MP, then use whatever other switch or knob to do the rest of the modes inside of that PWM range. You can use any switch you want, even a 3 way one etc, but just be really confident you know where and how it has to be to work. Hence the “own switch”.
Ok, I see. Having so many VTOLs has become problematic for keeping track of the flight modes so I use Amber’s voice to help out and keep a list of my current vehicle modes taped to the front for my Taranis.
Isn’t is late at night “down under” right now? Shouldn’t you be sleeping?
Lol na WA side it’s still early…12:30
I’d recommend to keep every VTOL bird the same config on the Taranis. It’s possible now with 3.8! Yay!
I just copy paste the models, rename and adjust a few things to suit.
When mounting my AS sensor, I had to modify the so-called 3D printed “APM sensor case” and even then needed to route the air tubes out the back. Does anyone know of a 3D printed case that actually fits this new style pitot tube?
The flying field was too busy with people, RVs, and campers this weekend for experimental testing so I flew my Ranger with the normal wing set to gather logs and just hover tested my mini Talon flying around an auxiliary runway.
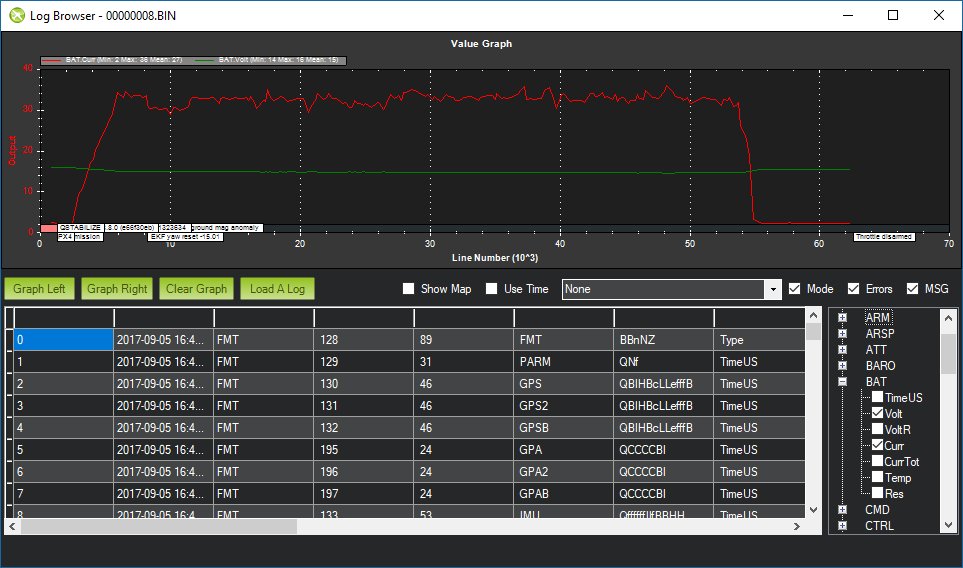
I was happy to see that the current draw when hovering was only about 32 amps or 8 amps per motor. Combined with my air cooling, this should keep the 30amp ESCs relatively cool.
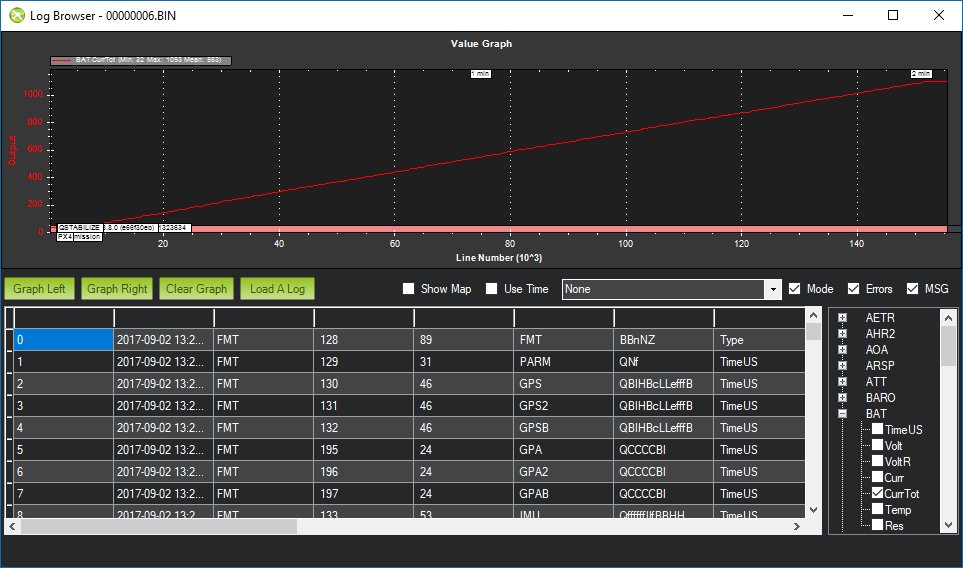
This first image below is from a shorter 50 second hover in my backyard. The second and third images are from the longer 2 minute hover at the field. This should represent my longest hover period in a normal or autonomous flight.
Looks like you’ve maybe “overdimensioned” the quad setup?
Hover amps looks good, you’re saving about 2A per motor in comparison to the 2206 6" setup, so you can hover longer now. If your QP propulsion temps are good it’s time to transition!
Looks like that pitot tube is like the one that sells HK which is where I bought mine. I’ve only found this one.
He’s fine, but I don’t like him being so fat on base. So far I haven’t found anything else. It will be a matter of modifying it. That the bottom tube comes out at such an angle complicates things.
If the drag of my 3-blade props seems excessive, I can try some HQ 9" 2-blade props and see where the ThrOut sits. But I think you’re right, it’s time to transition!
arruntus,
Thanks for the link! That is the best holder I have seen that covers the tubes. I am a bit surprised that no manufacturer has these for sale and you have to resort to 3D printed ordering.
After testing my hover capability, I decided to anchor the forward angle of the motor mount for safety with a small screw that was tapped into the carbon tube.
I also bought a Multistar 4s 8AH pack that weighs around 22oz (624g) to replace my test packs (2s 6AH in series) that weighed the same. The packs fit snugly under the front nose section for a perfect balance.
Looks pretty good. I chose one with a connector for the Pixhawk and one less problem. The problem is that the tube mounting parts vary depending on the sensor. A little more, when I get the 3D printer to see if I design one that fits this type of sensor well that one of the connectors has it in a lot of angle. I tell you when I make progress.
My first two tests of the mini Talon QuadPlane were very successful! In the maiden flight 1, the only issue I saw was that Q_ASSIST_SPEED was too high at 18m/s so I lowered it to 17m/s on flight 2 and it was much better. I’ll need to determine my stall speed to set it properly but I’m not really seeing an issue at 17m/s. The mini Talon is very stable in hover (QSTABILIZE) and forward flight (FBWA).
I have some similar questions. I think you have a 4s-Battery, what is the current consumption while hovering and while flyingin in FBWA mode with cruisespeed ?
Thanks, guys. The mini Talon sure flies like a rock so I can see why it is a popular choice for FPV.
My MT QuadPlane weighs about 5.6lbs (2.5kg). Both my 4s 6AH and 4s 8AH packs weigh about 22oz (623g).
Yes, the rocking in FBWA was the wind and thermals rising from the fields. It was about 80 degrees F outside.
I still need to get used to the plane and pull back the stick a bit on take-off and transition back to hover mode but they are still quite graceful. The MT scoots along nicely even with the added drag from the quad rotors.
This is the maiden flight of the mini Talon QuadPlane. Everything went well except for the quad rotors kicking in a bit too early with Q_ASSIST_SPEED set to 18m/s. You can hear when the quad rotors kick in on the video. I am not sure what my stall speed actually is but changing the value on the next flight (previous post) to 17m/s seemed to eliminate the issue.
Yes, I use a 4s 6AH pack and a 4s 8AH pack. Both packs weigh around 22oz (624g). The 8AH pack is Multistar.
I will try CRUISE mode on my next flight test. My current settings are ARSPD_FBW_MIN = 16 and ARSPD_FBW_MAX = 23m/s.
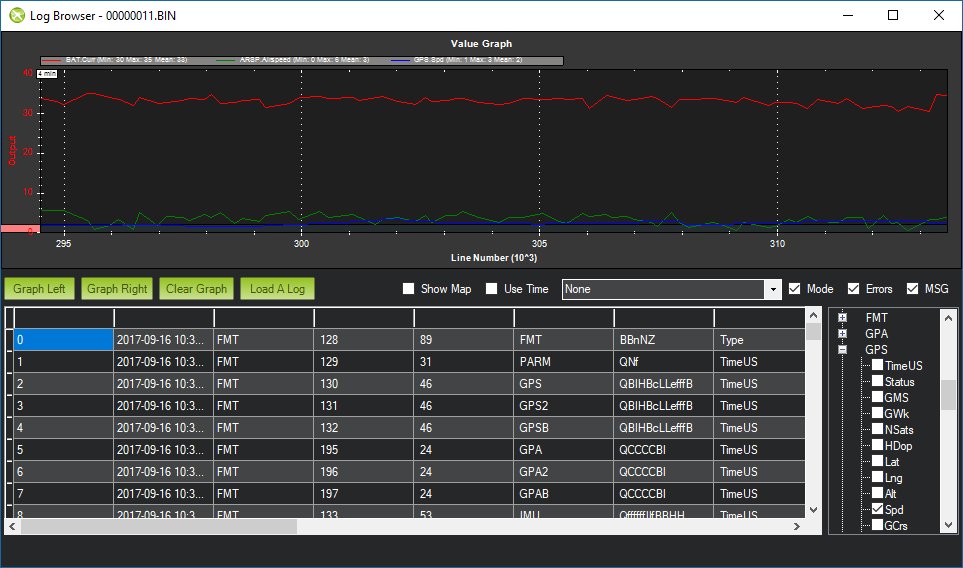
The first graph below is in FBWA mode. You can see the AS sensor and GPS speed track closely on a calm day. The forward flight current draw was about 15-16amps at 17-20m/s. (Red = Current, Blue = GPS Speed, Green = AS Sensor)