Hi Ron,
You new graphs look much better. The RC3_TRIM seems fine. Here are my RC3 settings.
RC3_DZ,30
RC3_MAX,2006
RC3_MIN,982
RC3_REVERSED,0
RC3_TRIM,982
Hi Ron,
You new graphs look much better. The RC3_TRIM seems fine. Here are my RC3 settings.
RC3_DZ,30
RC3_MAX,2006
RC3_MIN,982
RC3_REVERSED,0
RC3_TRIM,982
Thanks Greg, and so much for that theory 
If I can’t tune the q_stabilize stick position, I might do as uo suggested and to try some 6×4 2 -blade or 5×4 3-blade props I have
Have anyone else experienced problems tuning q_stabilize stick position on a overpowered quad or quadplane with fw 3.5.4?
Just back from 1 1/2 weeks at work and getting ready for the first transition to fixed wing flight with the MT. I have done few updates to the build, to improve reliability and for peace of mind 
Ron,
It looks ready to go…good luck!
I’ve just tried the apc 6x4 props but I didn’t like them at all. Hover was up to 55A compared to 30A with the 7x4 apc multirotor props. Q_M_THST_HOVER was up to almost 0.5 compared to 0.2. I know I will not spend that much time in hover but these where not the right props. I have put the 7x4 back and will use them for now (only issue is the altitude jump when I switch between in and out of q_stabilize).
That was a nasty jump in current…weird. My setup uses about 32 amps or 8 amps per motor so your 7x4 prop setup seems fine.
The 7x4 MR apc props has quite wide section blades compared to the narrow 6x4 E apc props. The 7x4 seems to be very efficient even compared to many larger dia props.
I will most likely just set up flight modes in the Taranis to modify the throttle cuve in q_stabilize, (to get the throttle centre stick position closer to the automatic altitude modes).
The weather has postponed the maiden transition to fixed wing flight, and I thought spend the time doing something useful 
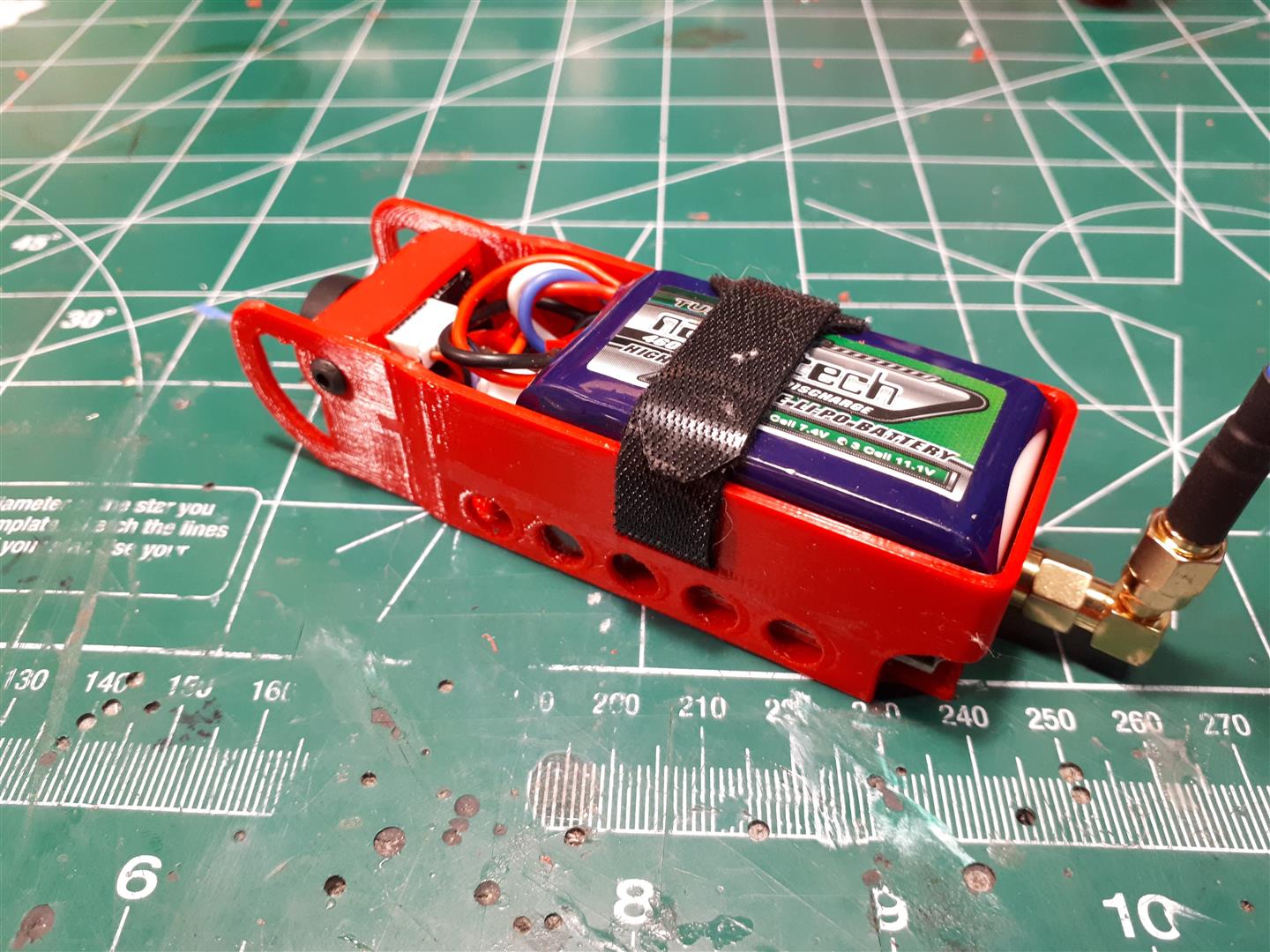
I made a small self contained fpv pod from some stuff I had laying around; a Micro Swift 2 camera, an Immersion 600mW vtx and a small 3 cell lipo. In addition to being nice to have video from the plane it can aid security for the first flights. I also built in a small microphone for added senses awareness.
It only ads about 100 grams to the craft when being used (even less with a smaller battery).
As a bonus I can chuck it onto whatever project for that FPV feeling
Looks good. Like me, you are a risk taker using a camera on the first test flights! 
great topic, amazing works!..one question: why didn’t use small motor as forward propulsion, like: Cobra 2221/16-940 kv or SunnySky X2216 1250KV. Why you choose a 2814 size?, is it too big for this plane, isn’t it?..I have 3 Minitalon, not Quadplane, with this size of motor and takeoff without issue by my hand. 
Hi Juan Pablo,
It is true that many motors can be used on the mini Talon. When converting the mini Talon to a QuadPlane, there is extra weight and drag to burden the flight so the 2814/16 motor has proven to be very efficient on a 4s Lipo pack with a 10x8 e-prop. The measured values are in the chart below.
Thank you Greg. I will try both size of motor, as you advice. How about try to extender the wings. It will improve the performance, i think. And it allow less cruise speed.
Hi Juan Pablo,
“Improving” the performance depends on the user’s goals. Most people want the higher speed for FPV and see no need to modify the wings. You can see many FPV videos here of the mini Talon on long range flights along the coastline or vast open areas.
In my opinion, the mini Talon flies great with stock wings, with or without QuadPlane modifications. When converted to a QuadPlane, you no longer need to hand launch it and can land in a small clearing at the cost of increasing the drag and reducing overall flight times.
Cheers!
Ok Greg, thank you so much. Another ask; I saw your post about SERVO_AUTO_TRIM command in order to trim a new plane. One question: after the first success trimming the SERVO_AUTO_TRIM should return to value 0, or It have to remain in the value 1, for ever…thank you much…again
That’s a good question. I am leaving SERVO_AUTO_TRIM on, and do not see any ill effects, but I am not certain if this is desired.
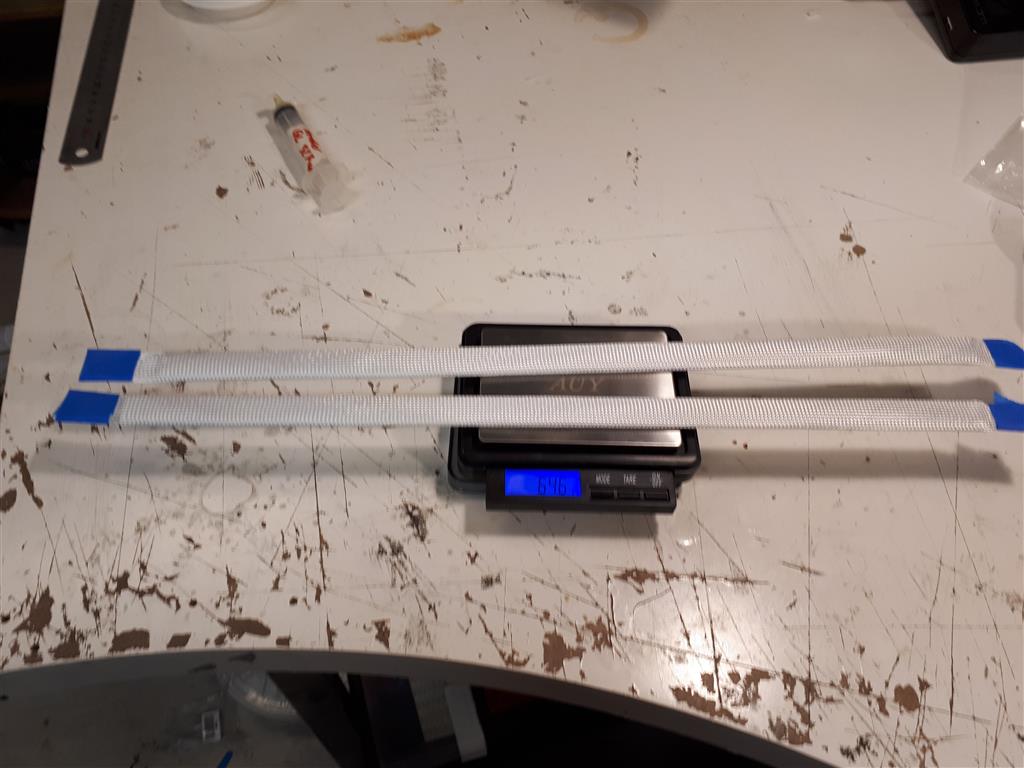
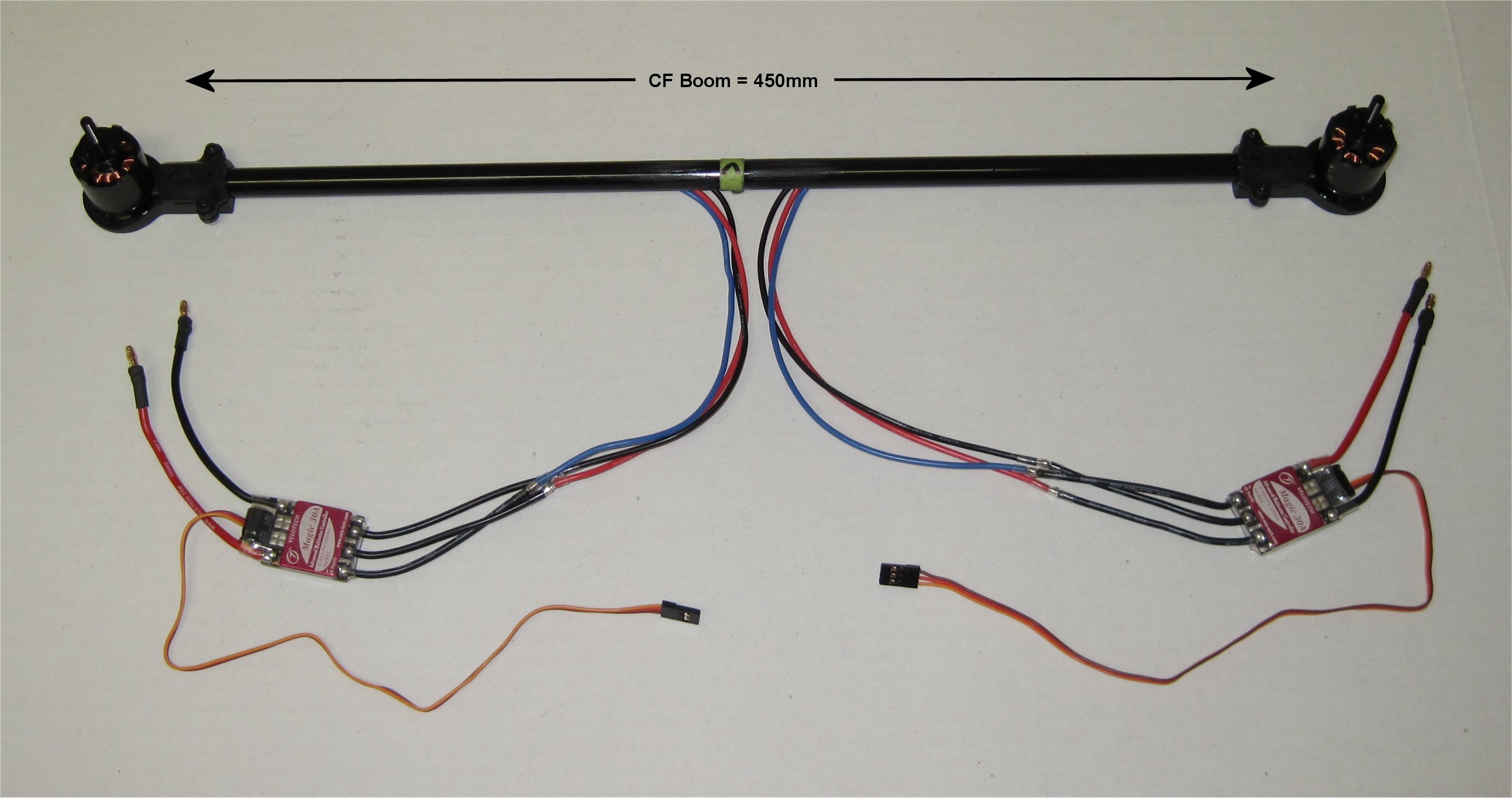
Greg – are your booms the full 750mm long or did you cut them? I am making a version of yours and have the same HK CF tubes – 750mm. Thanks.
Thanks Greg. Have you passed the wires through the middle of that CF tube by drilling exit holes?
I think I am going to make my booms easily removable with a 3D printed parts. The DJI E305 set that I am using is saving me almost 100g on your motors and ESCs so I have some weight to spare!
BTW, I went looking for Quadplanes threads and I see you have converted just about every conceivable plane into a quad. There should be some sort of merit badge for this!
Marc,
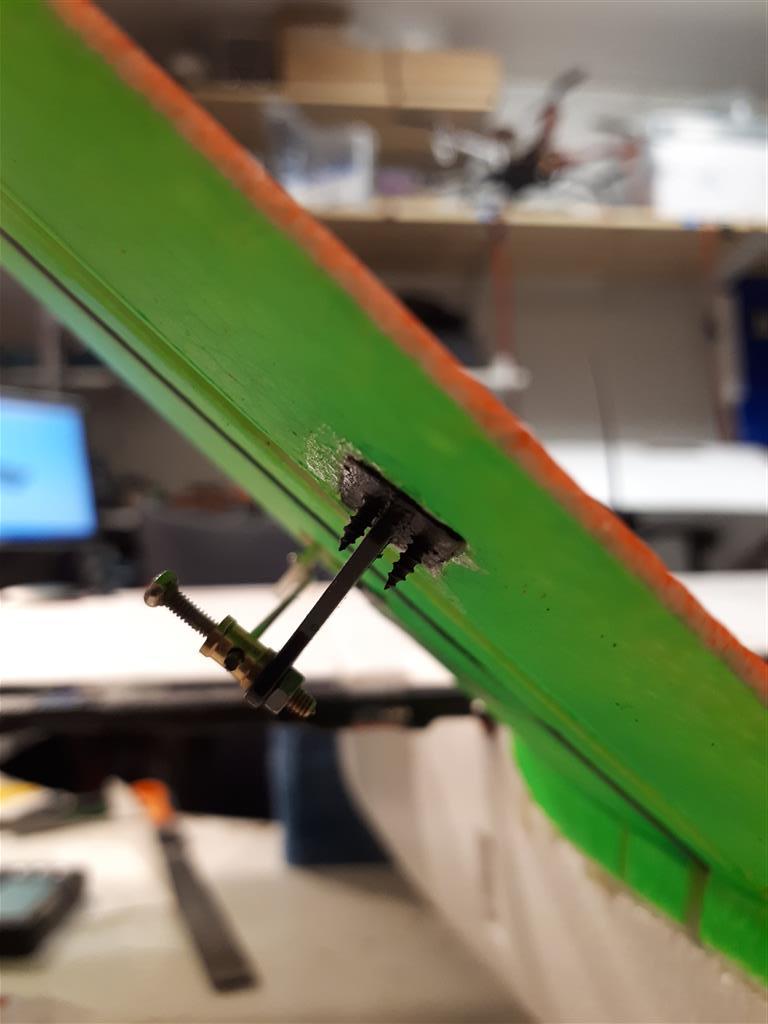
I created two slots near the middle of the CF tube using a Dremel tool. They only needed to be slightly wider than the width of the wires.
I would settle for some descent weather to test my new conversions. It’s been a rough spring!