A key aim of the build was to use recycled components from other projects to keep the cost low, but it ended up including some pretty expensive racing quad motors! Initially, the only purchases that were made specifically for the project were two carbon tubes, some mounting hardware, and the fuselage - I had a spare set of wings from a crashed MT.
The wing mounted arms, before the tubes were cut to length.
After finding there was too much twist in the wing to mount the quad-arms there, I attempted to mount some recycled flat-carbon 450-sized quad arms using the Mozzie components. Those carbon arms turned out to be too flexible, and I didn’t pursue that design.
Next, I designed some simple 3D parts that would fix the carbon tubes to the fuselage. The placement isn’t perfect in terms of CG, but it works. The front arm should really be a few cm forward of where it is to balance better. The rear mounted plate is tapered to account for the shape of the MT fuse.
Fuselage mounted arms with 1 degree of forward tilt.
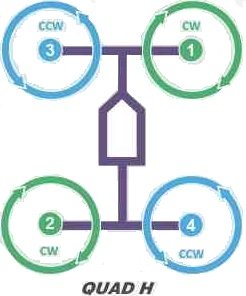
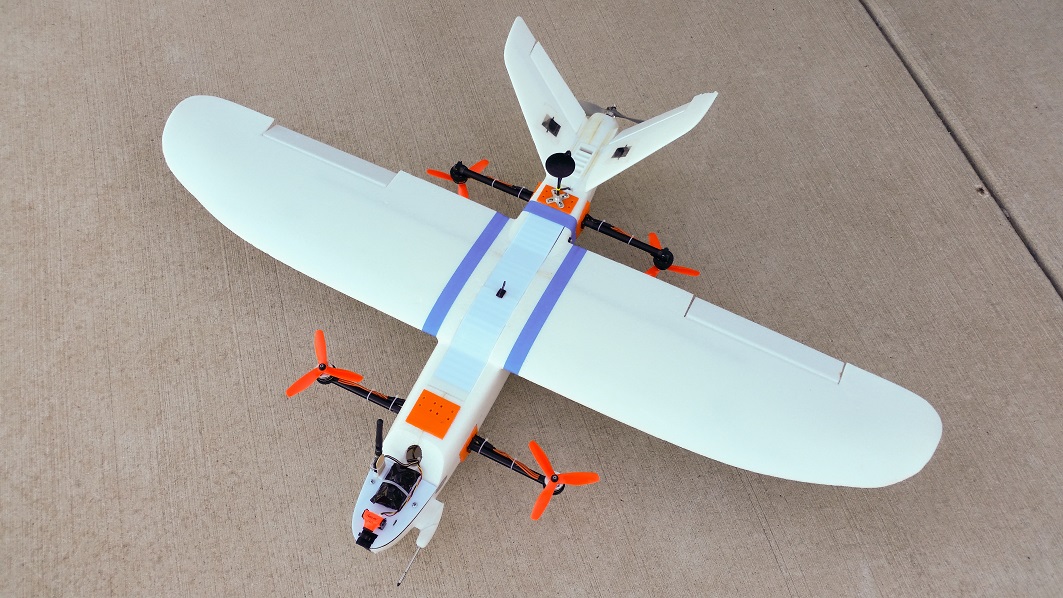
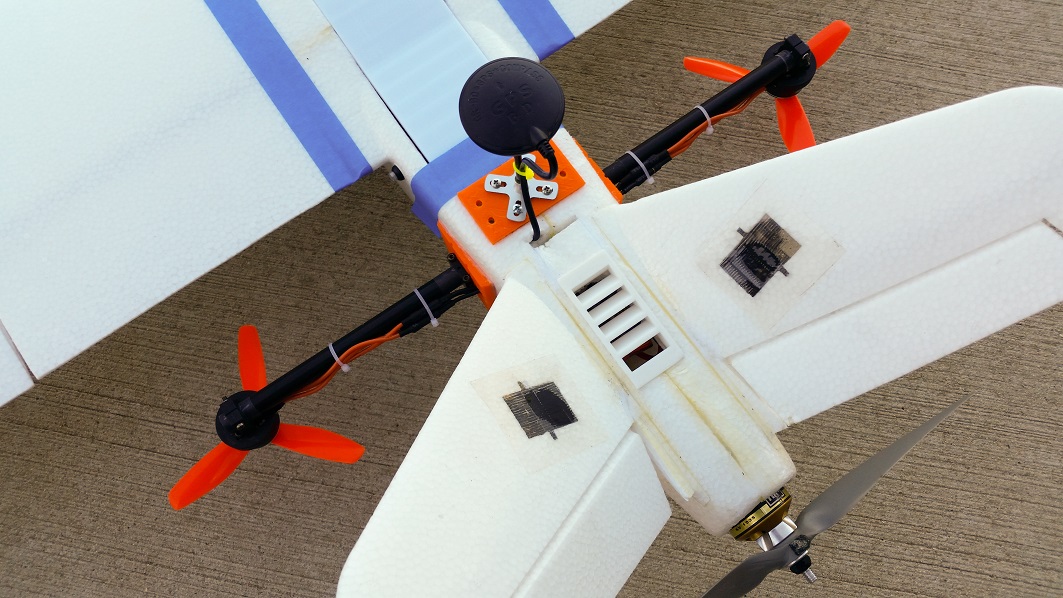
The frame-type is set to H-quad, which works well. You noticed the rear motors are pointed down, this decision was made to ensure that there is adequate clearance between the propeller and the trailing edge of the wing. With the motor mounted upright, there is enough clearance for a 5 inch prop. However, I may try larger props (or swap the motors to a lower kv) so the downward facing mount will ensure there is enough clearance for a 6 inch prop.
Rear quad arm mounts, GPS, and vent.
Having mounted the rear motors facing downwards, it was necessary to add a little extra stability to avoid a prop strike, so I printed some wing skids.
Wing skids.
After the initial problems experienced with the quad arms mounted on the wings (which used 2212 motors and 9 inch props), I decided mini-quad motors with high power output and smaller props were the way to go - my miniquad will have to wait for motors…
The power system is configured as follows:
Main propulsion:
2814/16 1035kv
Afro 30amp ESC
APC 12x6 prop
Quad propulsion:
2207 2750kv
Generic 40amp ESCs
3-Blade 5x4.5x3
Hardware:
Motor mounts
Tube clamps
Power:
2750mAh 4S2P for 5500mAh (these packs are really old need to be replaced in time)
My general observations on the project are that it now needs an autotune in plane mode. The quad tuning seems to be pretty good. Even so, the quad motors are running a little hot, and I’ll next try moving down to 2-blade props.
Here’s some video from yesterday, including inflight video from a friend’s quad. It was pretty windy, but the quadplane handled the conditions well.




 Or Im not understand? You have enougth space for batteries? I love endurance and little builds but not always a compatible thing
Or Im not understand? You have enougth space for batteries? I love endurance and little builds but not always a compatible thing  but Mozzie looks the case.
but Mozzie looks the case.