Hi Mohan,
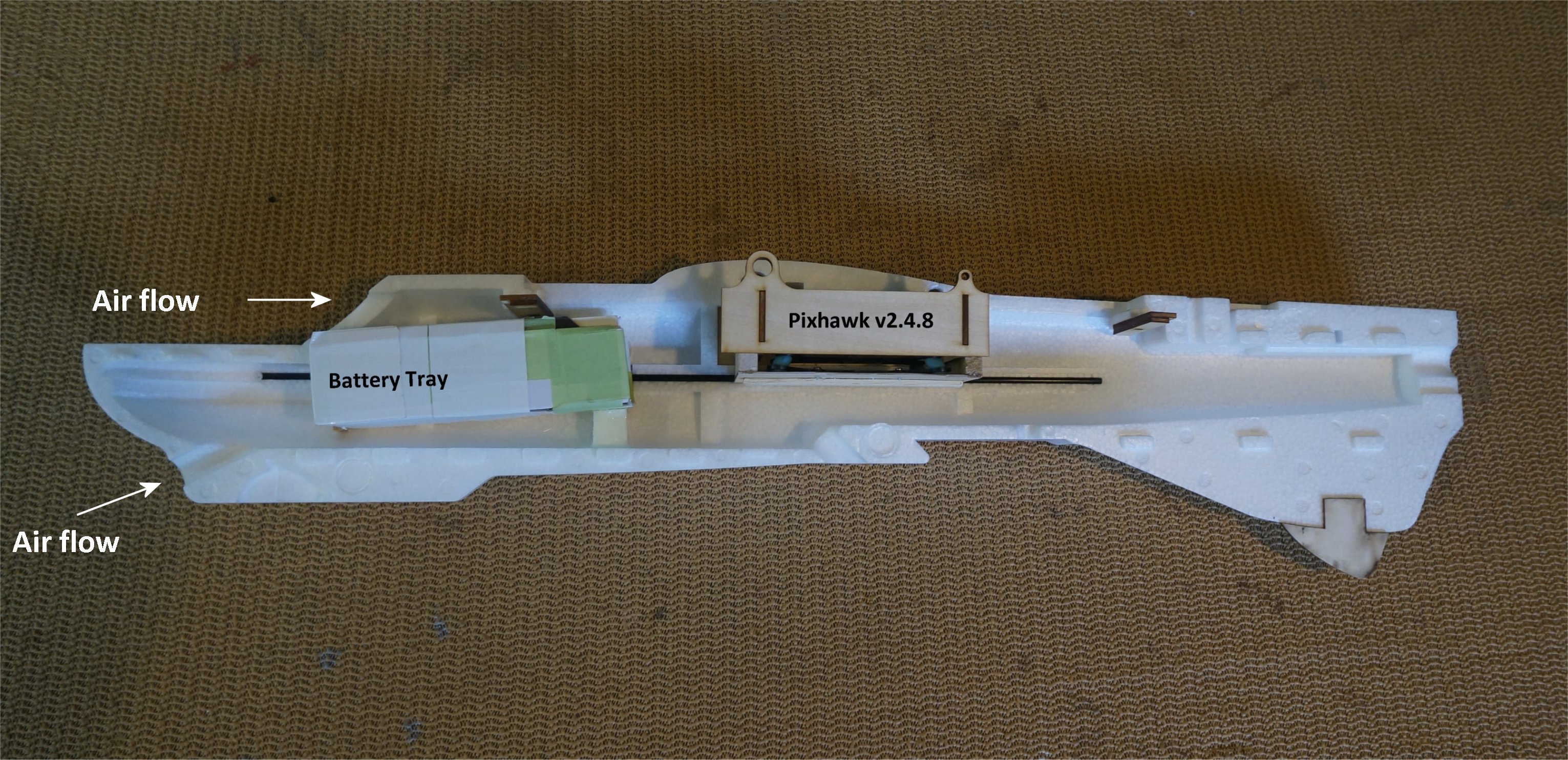
My flight controller will be the same type as my previous MT QT. A Pixhawk 1 (a.k.a. Pixhawk Pro or Pixhawk v2.4.8) These are inexpensive and I have several new and used ones on hand.
Original mini Talon Conversion Links
Mini Talon QuadPlane Conversion (circa 2017)
Mini Talon QuadPlane Conversion (cont.)(circa 2019)

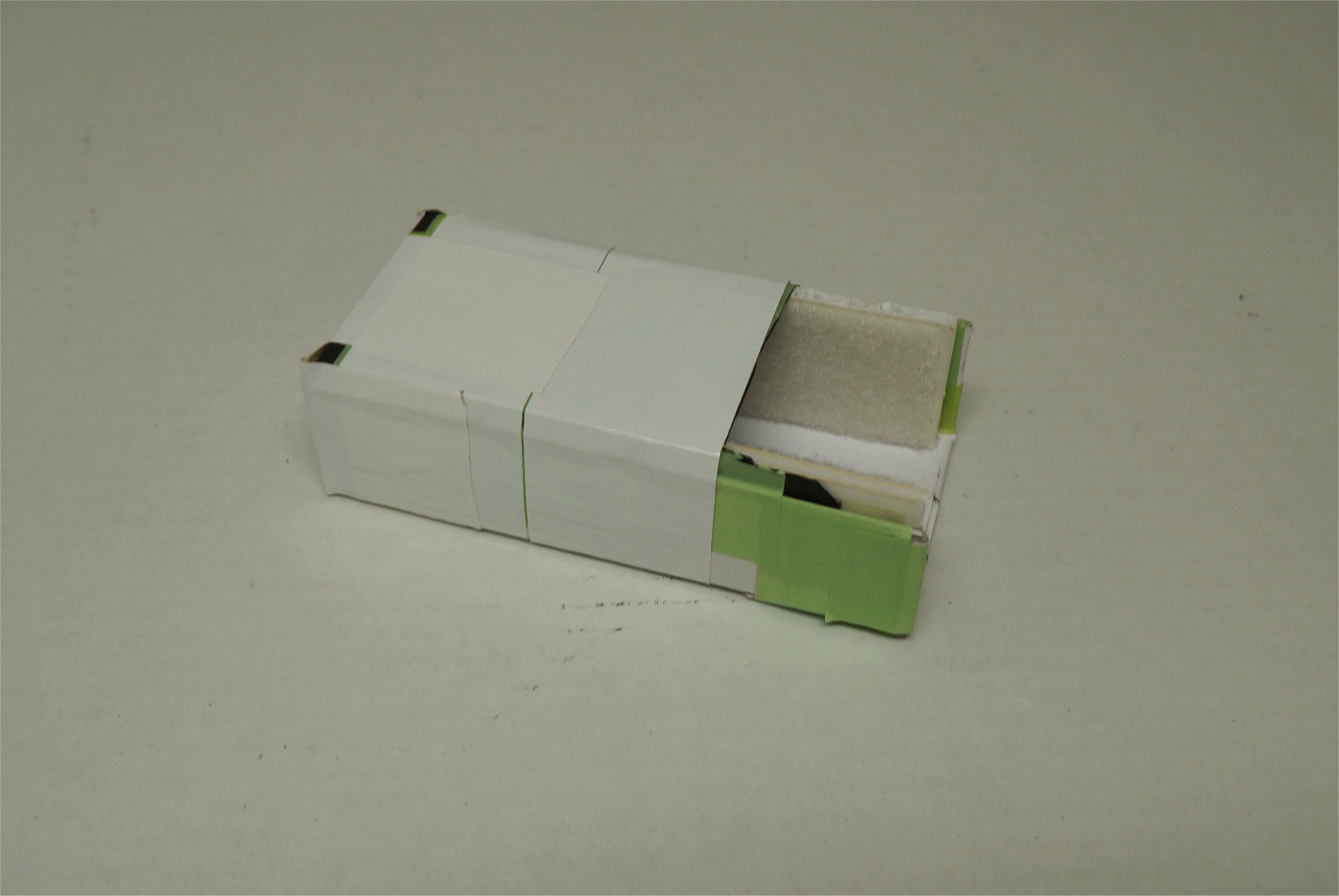
One thing I learned from my previous MT conversion was to build as much of the assembly as possible before gluing the two halves together. I also wanted a battery tray where I could simply drop in the batteries and secure them with a Velcro strap. Since my 5 sets of 3s 5AH packs were used on other projects and had no Velcro on them, it was a requirement to keep them that way.
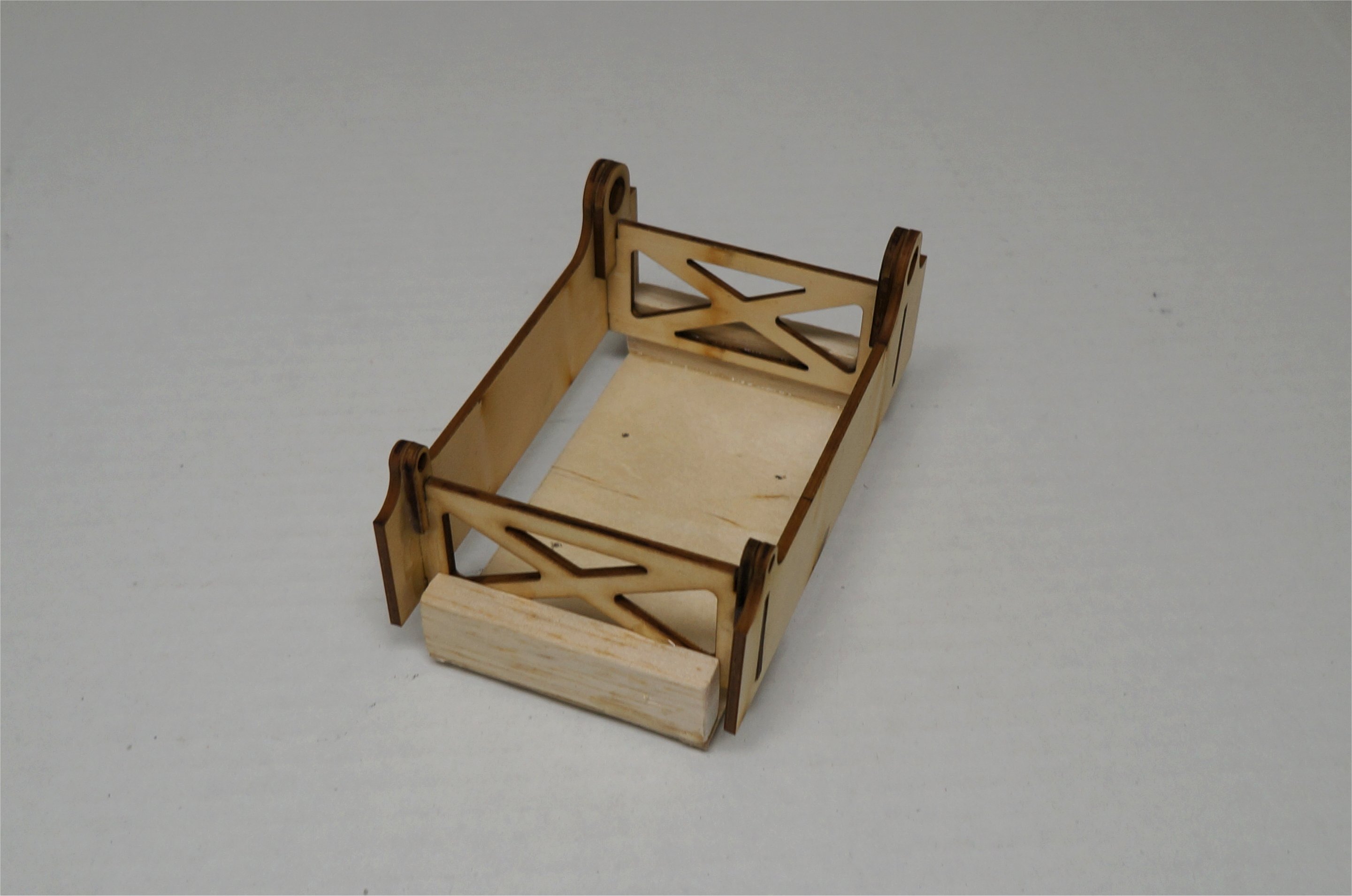
Many folks use 3D printed parts for this model but I simply use the stock plywood parts. Even my battery tray was made from a modified cardboard box that the batteries came in with some fuzzy Velcro to help the batteries slide into place.
When placing the battery tray, the goal was to not obstruct the air flow, from the top and bottom entry points, but to place it in the air flow path and across the batteries. Not shown in the pics are air entries into the front of the tray.