My MT came to life today as I powered up the main distribution board with a 4s Lipo and everything worked! I did run into a couple issues that perhaps others can comment on. I’m using the released Plane v3.8.0 and MP v1.3.49.
Mission Planner would keep repeating, “No I/O Thread Heartbeat”. Is there a way to stop this?
My linkages all used the outer servo arm hole and the middle control horn hole which gave me so much throw that I turned the gains down to 50%. Should I change the middle servo arm hole and the outer hole on the control horn? What are others using with APM on the MT?
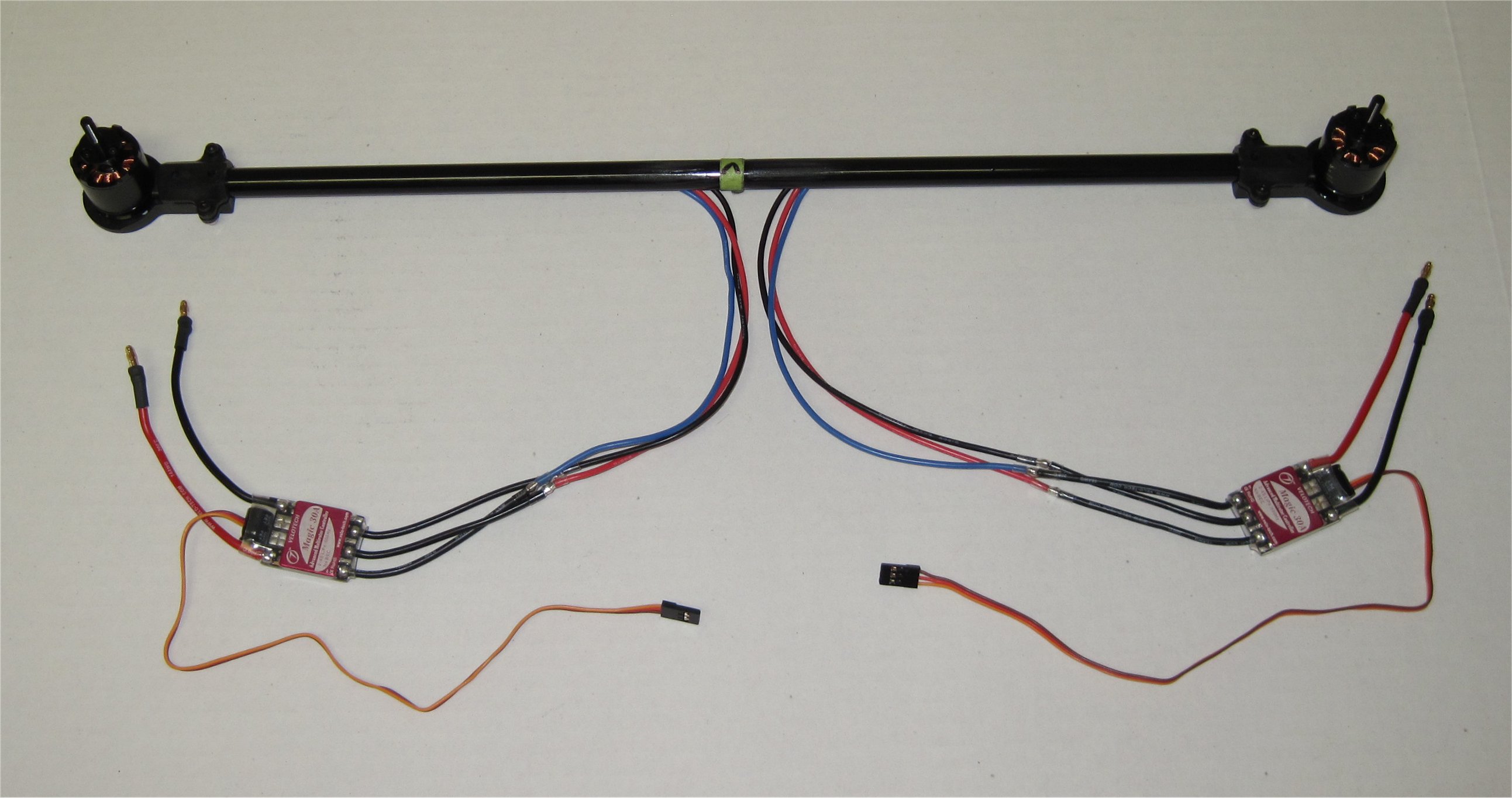
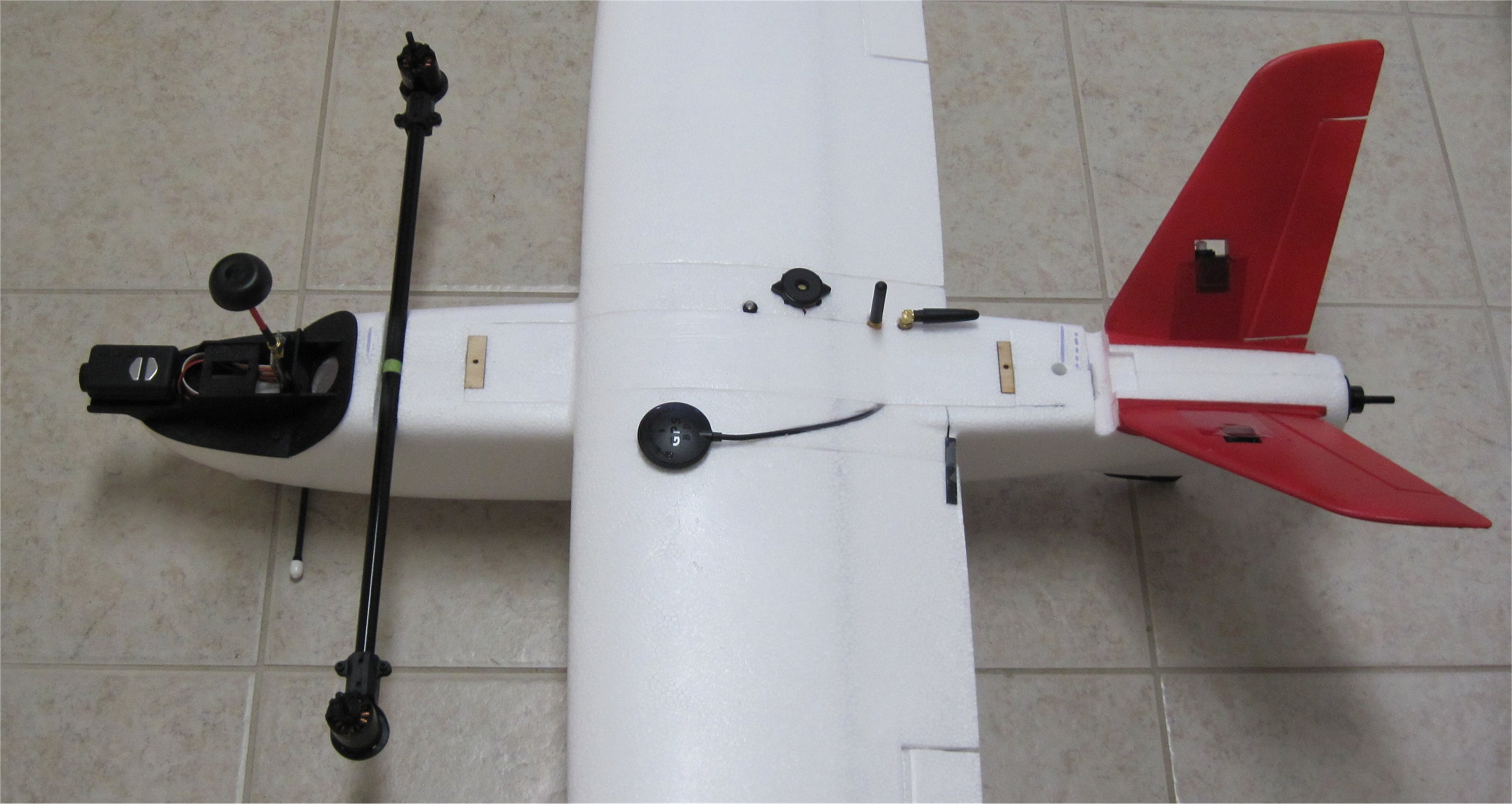
I created a whole assembly for the front quad bar before installing and gluing it into the MT. In this manner, it is plug-n-play with all the connectors. Note the forward arrow on the green center tape to provide proper motor rotation for an H-frame and center the carbon bar when gluing it in place.
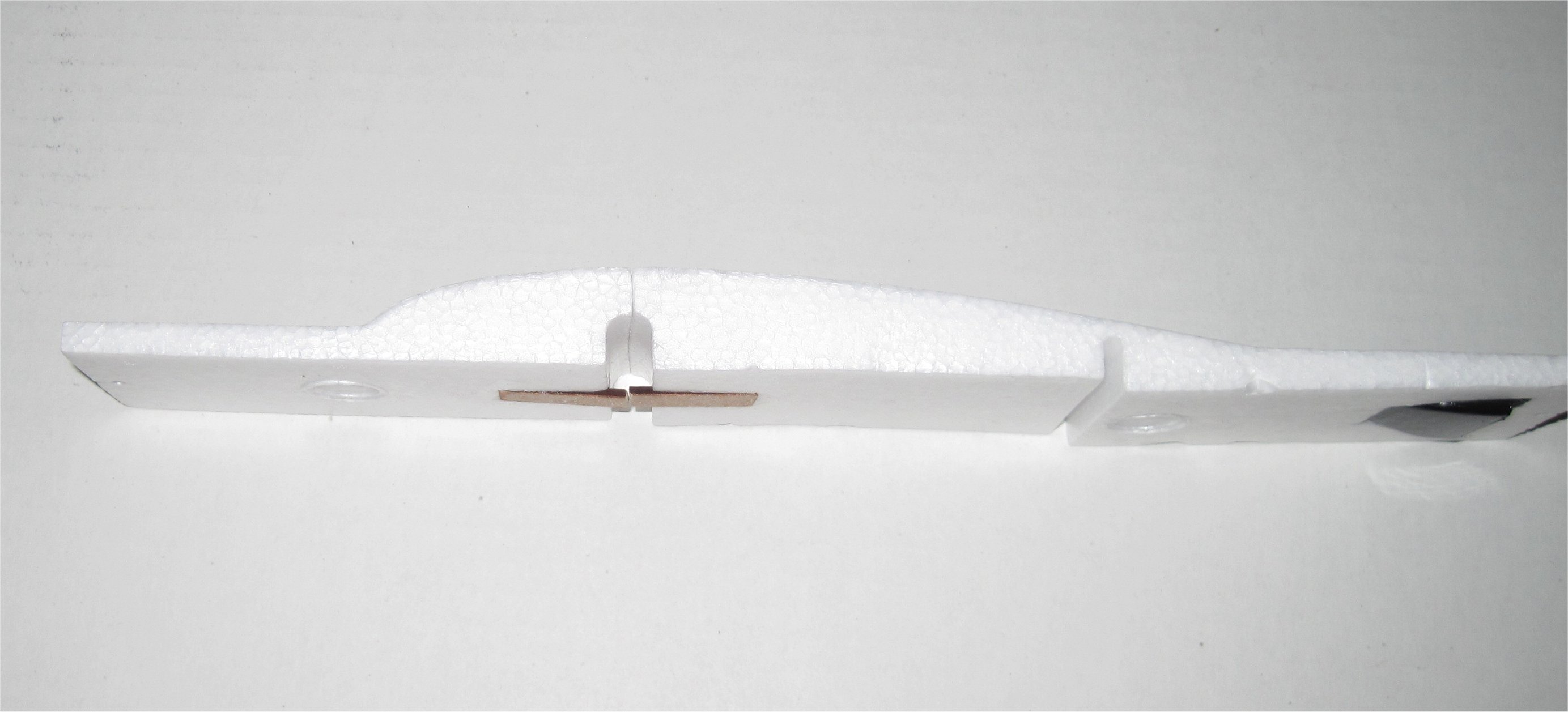
The slot in the main MT body was created by first cutting a “V” into the foam with a craft saw and then wrapping sand paper around on of the 12mm rod cut-off pieces until it was below the surface. This allowed me to optionally glue a thin plywood piece over the top for additional support, if needed.
Initially, I’ll use Foam Tac to glue the carbon bar to the MT frame and then determine if more support is needed. I replaced the front wheel with a short carbon rod stand to keep the MT upright.
I still plan to mount my digital air speed sensor and paint the wing tips red. Under the wings, I have long reflector strips.
your front arm needs to be moved forwards 40-50mm so it sits in front of the nose crease like on the Mozzie to get the right CoG/CoL for the quad motor setup. This is not really optional as the front motors are always loaded more on transitions. The quad arms should be equal distance from the MT CoG on the wing. Also your arms are longer then they need to be I think, and how are you going with prop clearance to the wings with the larger props? I should have realized this before, but I doubt the rear props will clear the main wing. (the front props won’t either with the current arm position on top of the fuselage) Sorry! I’d recommend test fitting everything before proceeding.
Cutting the fuselage like that will require it to be stiffened again once you mount the quad tubes. The MT fuse is not very strong. BTW those tubes will produce nearly as much drag as the main wings. A cylinder has a Cd over 1, a wing typically around 0.1, so factor ten less. But provided your hover props clear you should be able to make it work.
Also the reason why NASA designers use free pivoting fairings on their quad arms like this to reduce drag:
The rod lengths and positions were pre-measured with the 10" props so it should work fine. When using the 10" props, there was little room for equal distance to the CG without wrecking functionality but it should be close enough. As with most VTOLs, they are designs of many compromises. The mini Talon is quite small and should handle many variances.
My goals are more hobby-based for inexpensive repeatability so the inefficiencies don’t bother me. The main efficiency has been duplicated in the forward flight power system. Keep the suggestions coming…thanks!
The Hercules above looks similar to my “flying breadbox” below. The Ares V-Hawk started out as a Graupner design before it was produced at a much lower cost by Ares. It flies very well in stock form. Time will tell if I need to look into free pivoting fairings.
I appreciate all your comments and hope to see more QuadPlane threads start in the v3.8 forum.
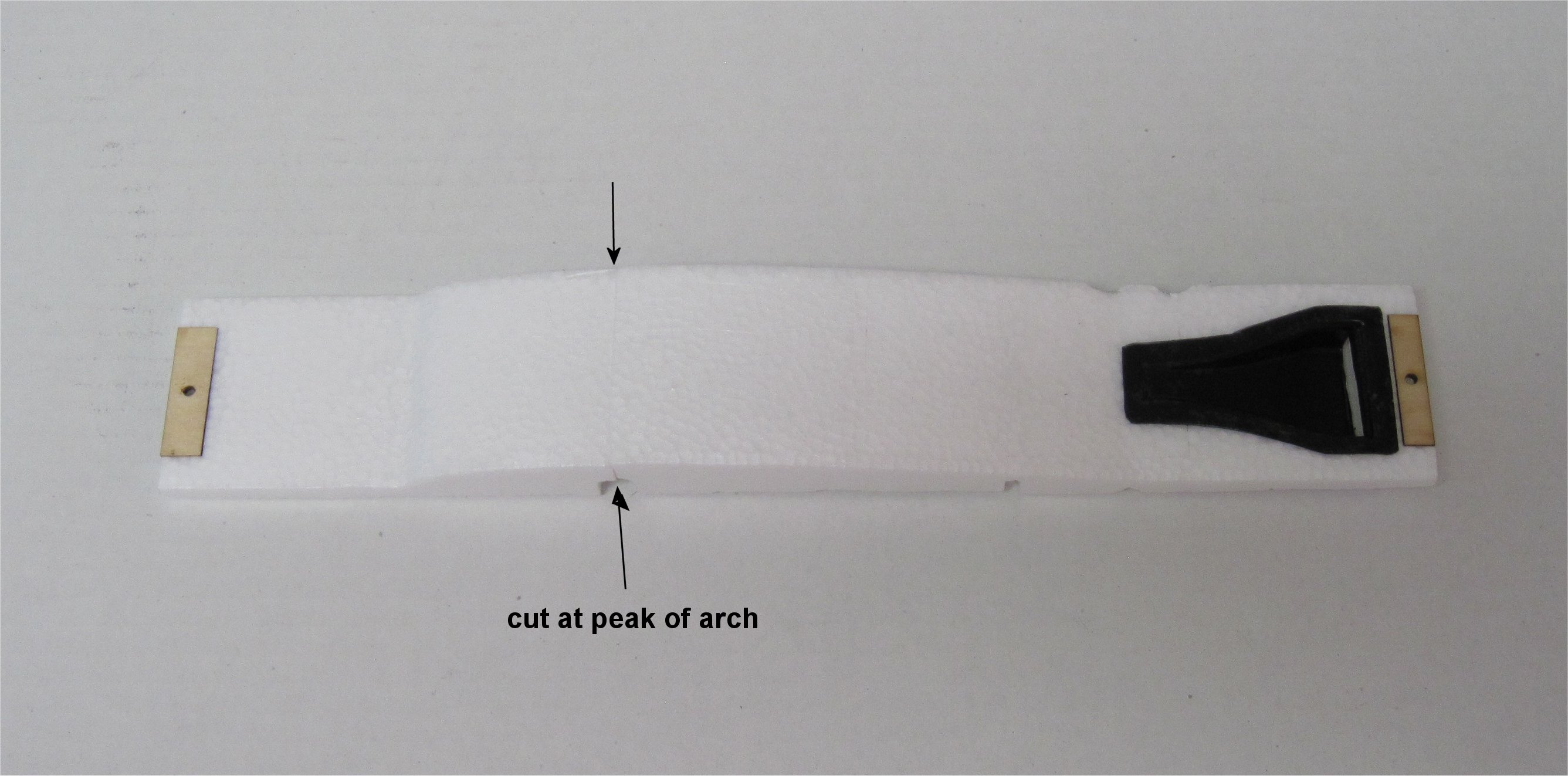
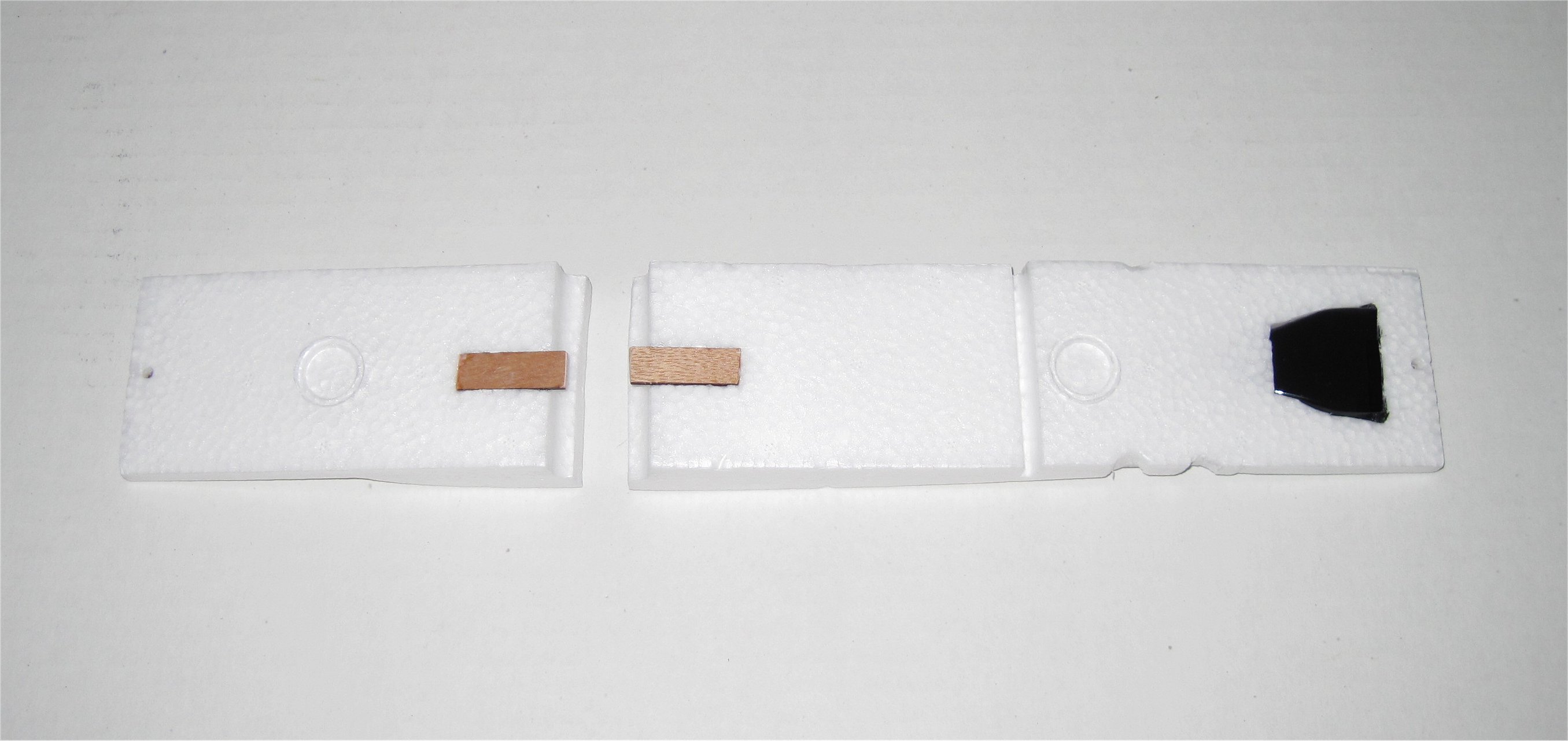
There didn’t seem to be any reason to take the whole top hatch off to swap LiPo packs so I cut mine into two pieces so that only the section forward of the main wing bar opens up. It seemed easier two remove just one screw. This winter (our building season), I will likely replace the front screw with a hatch latch so there are no loose parts.
I also started to use my NACA Style Inlet Duct Set from Hobby King to add air flow around the rear ESCs.
Certainly more elegant than my solution. I simply used the thin foam over the rear carbon rod as a hinge. The hatch was always bending there anyways. I added some tape of course.
Thanks, Sebastian. Your 3-bladed props inspired me to change mine to the ones from HK below. I’ll still likely use the HQ 10x5 prop for the forward flight motor. The 3-blade props give the MT QP a different look. I’ll still have plenty of HQ 10x5 props to try both.
3 Bladed quad props produce even more drag in forward flight. (if that’s what you are using it for)
If you are using that Cobra motor you listed above in your build list, you need to put a 10x8, not a a 10x5 to get maximum forward range. The pitch needs to match the thrust required to overcome drag at forward cruise velocity (ecalc can help). A 10x5 will produce more static thrust but not the right amount of dynamic thrust at cruise speeds the talon is efficient at.You don’t need static thrust for a QP, as you don’t need to launch it with the forward motor when using the quad. If there is an issue with static thrust on a QP, slowly increase the forward motor RPM to avoid prop stall.
Thanks for keeping us efficient. Have I told you that if I fly for more than 15 minutes I get bored?
It will be fun to test both 2-blade and 3-blade props on my MT hover rotors. Recall that my goals don’t need to be the most efficient but it is good to post more efficient solutions for others. Also, feel free to post Mozzie images here.
For the forward thrust motor, I was using the prop chart data below for my HQ 10x5 prop which is identical to the more expensive Graupner 10x5 props that I used years ago. Can you post numbers using the 10x8 prop please?
Well if you get bored of flying after 15 minutes then the Mini talon QP isn’t for you!!
We’ve had ours go 137 minutes and 115km on two 6600mAh 4S in one flight. https://www.exmaps.com/653155
You could takeoff, send it on an auto mission, go home and have lunch, then a hour nap, then afternoon tea and still make it back in time to watch it land!
As for the prop setup the added weight on the talon increases the cruise speed (dictated by the wing loading and overall drag), so you need to have a prop pitch around +130kmh. Our 10x8 Aeronaut prop is effectively overproping it to get ideal cruise…this is by experimentation not just calculation, using that same Cobra motor. You only need around 450g of thrust at 24m/s, so provided the airframe is nearly as slippery, I’d try to stay around those sizes.
I recommend to buy a prop pitch up or down to test. The test is simple but a bit time consuming; which prop maintains a given cruise at the minimum current draw. Set it to 4-5 different speeds to test best cruise (even out of the range you’d think will work) and do that same test for all the prop pitches you have available to test. Then extrapolate the best range relative to velocity and current draw to choose the right prop. Set your cruise speed accordingly and fly longer!
Sorry, I get an itch if something’s not efficient. The German in me I suppose.
That would be qloiter. It flies around fine in qloiter, and if you want to go faster just go to FBW. I only use Qstabilise for setup, tuning or recovery, and then use qloiter from then on. Generally, I try to use the wings more as they aren’t such a huge drag
I’ve been meaning to put in a request since ages for a control method change via an extra hybrid mode so that hard transitions become unnecessary all together, plus the RC input will no longer change function (in particular the throttle being currently altitude in hover and forward velocity after transition). There’s no real reason to have two flight control methods as the RC sticks can control enough dimensions without having to switch between them. The FC should do the thinking, not the pilot.
So QLOITER can be used to hover in place, with alt. hold, but uses the forward flight motor to move forward with the pitch stick? I have typically used QSTABILIZE or QHOVER because of this information below from the Wiki. It didn’t make sense to go into FBWA mode and back out into a different mode so my transitions have been QSTABILIZE>FBWA>QSTABILIZE or QHOVER>FBWA>QHOVER.
A typical test flight would be:
takeoff in QLOITER or QHOVER
switch to FBWA mode and advance throttle to start flying fixed wing
Sorry, but i believe, there are a lot of reasons. You mentioned an important issue flying VTOLs !
What control method do you propose, which is not only technical suitable for both flight modes (Copter/Heli versus Plane - I think the well known differences have good reasons) but also takes into account the habituation of our brain if we are used to fly both helis/copters and aircrafts.
With now almost 50 complete transition-flights with our tri-tiltrotor “Mozart”
we experienced that human brain automatically changes the “modes” when transition is completed.




 I’d recommend test fitting everything before proceeding.
I’d recommend test fitting everything before proceeding.