Well, I am having a horrible time with my MiniTalon conversion…
the conversion:
Took my top end MT usually flying at about 1600g with stablized gimbal and SS2814-1250KV as base to convert
Added 23" 10mm arms…one is 26cm away from CG the other 27mm…close as possible given constraints to being equal…
Added 35A 4in1 ESC and 2212-950 motors swinging Gruapner 10x5 carbons thin-E blades (this same setup carried a heavy 4s 5000mah pack and gopro on gimbal on a Flamewheel)…hovers the plane at about 75% but all I want is a takeoff and landing VTOL…marginal but should work…but doesnt
The problem is that it will not hold YAW and has almost no YAW authority…its an X frame Quad setup
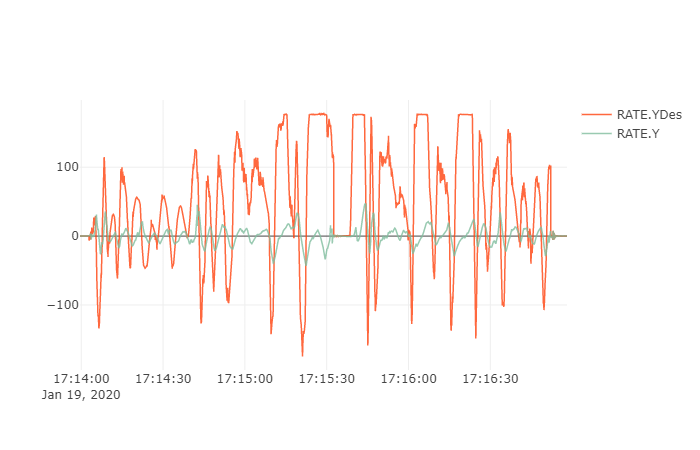
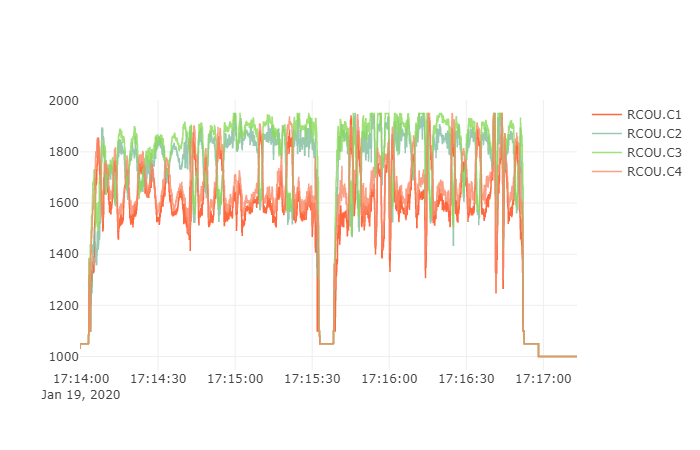
The motors (output 1 corresponds to Motor4, 2 to Motor2, 3 to Motor1, and 4 to Motor3) are trying very hard to yaw the plane left (M1/2 higher than M3/4) overall while the plane is generally not yawing…see below…so much so that average is barely enough to hover (`1750) but the motors are close to the saturation limit and cant be raised further…
indicates an big imbalance somewhere right?
I have blocked it up and measured all prop distances to ground…motors are within 1/2 deg for/aft/left/right…
all are turning correctly and prop facing up
I have runup each motor with prop to 50% and tach’d them they are all very close to the same
-even tried a 5deg shim on one motor to induce a lot of left bias, hoping to reduce the amount of left the delta in the motor pairs had to produce…very small effect, just showing how bad mis-alignment would have to be to account for this…even tried switching to H frame just in case something changed in the motor ordering recently…
PS most of the yaw demand is me trying to keep the nose wander contained to a few degrees, I am inputting it via rudder stick…but hardly any result as you can see…and the M1/M2 motors are just honking to try to turn it hard left…again without much effect
Your QuadPlane setup should have plenty of yaw authority so I suspect something basic is wrong. It acts like the motor rotation directions don’t match the H-frame mixer, but the graph shows the two clockwise spinning motors (Servo2 (Function 34) and Servo3 (Function 33), 1 and 2 on H-frame) are running faster than the counter-clockwise motors which suggests it is trying to compensate the rotation.
One other thing to try would be to load an older firmware like v3.9.x just to rule out the 4.0.2 variant. I am using v3.9.8 with X-frame on my MT VTOL.
thanks Greg…its an X, so M1 and M2 high (RCout2/3) means it trying to turn left, hard,…they are counterclockwise rotating…if yaw rate desired is positive, meaning it wants to have clockwise (right) rotation, it should just lower M1/2 and raise M3/4 which it doesn’t…I even tried setting frame type to H for grins…of course its just worse…
and its the same on 3.9 or 4.0
A VTOL or copter needs a good compass without interference for direction when hovering. What if we test the compass? Can you use only a single compass and place it temporarily higher as an experiment?
Its a 405-wing, external compass only…in gps…12 inch away from any power leads…I dont think its a compass thing…the key to me is that going from 0 to a lot of demanded clockwise yaw rate has no real effect of the hard left the motors are being driven to…PID gain can affect that (it does a little, tried 4X on yaw P, as well as eliminating totally the YAW headroom param which limits total average throttle max )…again with no real impacts…also checked VIBs…they are low…
although overall power shouldnt matter, only affecting climb ability, I have ordered SS2216/1250s to run with 8-9" props…that will double the available thrust while adding 80gr to the weight…should hover at 35% or so…maybe that will work…shouldn’t matter, but will try it…
This is first time for me setting up a quad (even if it is a plane).
1.I did qautotune on roll axe. I am not sure it did a good work. How can i check it? What are the parameter key to look at in .log file?
2. Than i was going to autotune on pitch axe. I wanted to do it in qloiter mode but i found it was not really good at maintain position. Could you please help me read the .log file and tune it better?
Plane is a mini talon with quad racing motors and 4in1 blheli_32 esc.
changed motor mounts to eliminate any possible alignment issues by mounting flat on the carbon tubes…and upgraded to SS2216/1250s (dont think that was the issue, the mounts must have been)…first transition and flight
todo:
experiments with motor mounts to add back in the 6deg forward tilt to reduce flight drag and increase hover lift in wind , also want to try 3deg “tilt inward” to increase yaw power of motors…those thin gruapner props cant be producing a lot of torque
retune gimbal…been out of service for a year and has a little roll shake
try different lipo than Mulitstar 10C 4s 5200mah…lots of drop at 30amps!
That looks much better, congrats! It sounds like you have some angry hornets aboard with those smaller props. I’m using a Multistar 4s 10C 8AH pack (22.5oz) in my MT without issue. I love the way the MT flies like it is on rails!
I have never used QAUTOTUNE so try posting your question in the thread below. Why did you think that you needed to tune the quad mode? Can you post a video?
Typically, I would make sure that the QuadPlane flies well first in QSTABILIZE mode, then QHOVER mode, then QLOITER mode. For this, you need some quadcopter flying experience.
This is first time for me with 4 propellers!
So sometimes i may have some doubts.
I feel it hovers good. Also loiter is good.
Yaw is a problem: when i move the stick it starts rotating, than it overshots and try to correct again and it feels so imprecise.
I know quadplanes are not good at yaw, but i know it can do better than this, for sure.
Also: how do i know how much throttle does it need to hover? Can you say it from the log?
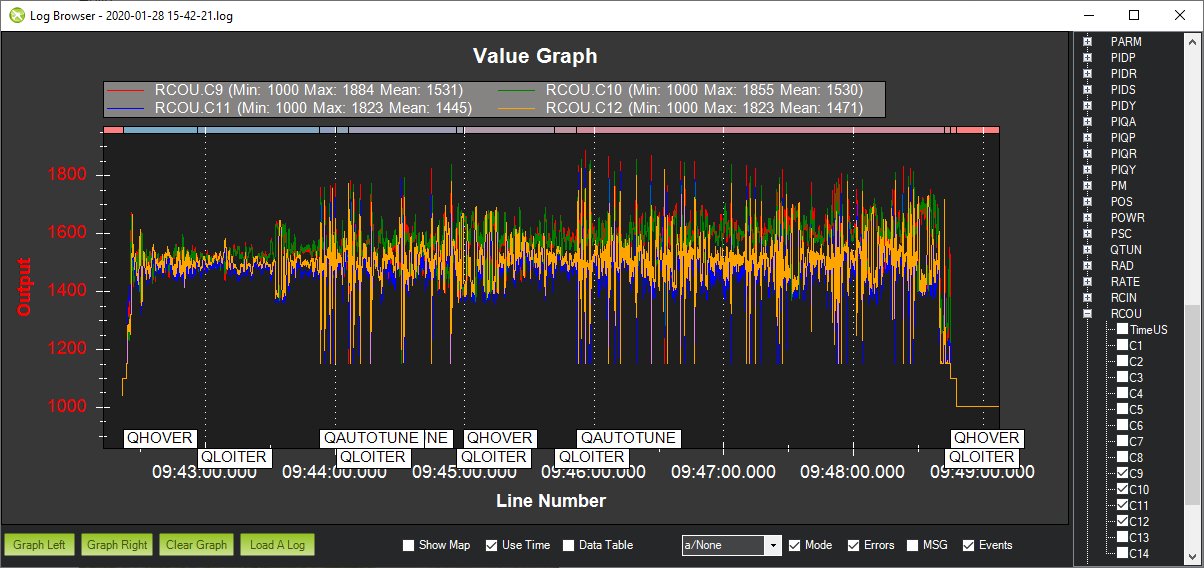
Yes, you simply graph the signals to the four quad motors during hover. Here is the graph from your log file below. You can see that your level is about mid-range (1500) during the initial QHOVER and QLOITER mode testing. This is fine.
Next time, post the .BIN file, not the .LOG file. You can try running QAUTOTUNE on the Yaw axis or changing Q_A_RAT_YAW_P slowly by 0.1 increments. These are my values below.
I think it looks pretty good! It won’t be a rock-solid hover with those small props and it doesn’t really need to be. The idea is to get off the ground quickly and go fly!
The original Mozzie looked about the same. I built mine more for demos than efficiency so the larger 3-blade props have a stronger hover hold.
I agree with you Greg.
This is inspired to mozzie.
I will try 5" propellers instead than 6040 i have mounted now.
Will aso try a two blade instead of three.
Than, once i find a good setup, i will put some aerodinamic fairing on motors.
After flying as a standard MiniTalon, two different conversions of quad motor QuadPlanes, I converted it to a Tilt Tricopter QuadPlane. I used MarkQ’s qv.com/QVM/index.php?title=X-UAV_Mini_Talon_VTOL_Project conversion as a starting point.
Its much heavier than a new model would be since it been crashed umpteen times…22 hot glue sticks and ply re-enforcing adds to weight…2.2Kg instead of 1.8Kg that it should be!
It follows Mark’s design generally except I used a miniquad carbon arm in the tail since I didnt want to fabricate a carbon mount there, 10mm square carbon tubes, because its easier to secure things to them instead of round, even though a little less strong.
But I wanted to see how simple I could make the tilt mechanism, mechanically and to 3D print. I hate long print times! It uses one of the cheapest 9G servos and no ball bearings, just to see if its possible. And although there is some slop and imprecision, the MiniTalon and ArduPilot handle it!
I had tuned the yaw on a calm day and had it overtuned as you see it wag in the windy turbulence. In fact the wind was so high (15mph gusting to 20mph) that could not VTOL land in the wind, after switching to QLOITER to land, it could only maintain about 10mph forward…so I had to land crosswind, since it can actually move a little faster sideways since the roll limit is higher than the pitch limit…
The tilt mechanism is simple to print and build, but next I am going to just add ball bearings and a bit smoother servo (double ball bearing) for enhanced durability and the ability to get a tighter tune without wag. Virtually no change was required to the printed parts, so printed easily still.
Nice job! I liked the low level transition just before landing. My preference is still to use QSTABILIZE in those conditions as it gives me the best stick control. It may be from flying copters for years.
The MT is a good flyer in some wind, and, when you load it up for VTOL, it doesn’t seem to matter because you no longer need to hand-toss it or try to slow it up before landing. It would have been interesting to see a comparison performance using the QuadPlane version since it provides better capability in those conditions. It’s all a trade-off for what your goals may be.
Just look on my youtube channel…the two videos preceding this one are two different MT standard quadplane setups…the older uses cross frame arms, the Dashware example was from a version with wing mounted arms…