OK…I’ve got a new concern. This one is less specific to the Mini Talon as a quadplane and more just about the Mini Talon.
A few weeks back I was showing off the quadplane. I quickly ascended as a quad, went into forward flight. Motor power was almost constant and fairly high (14-16 Amps at 6S…so about 360 watts). Speed was almost constant and fairly high at ~24 m/s (about 50 MPH).
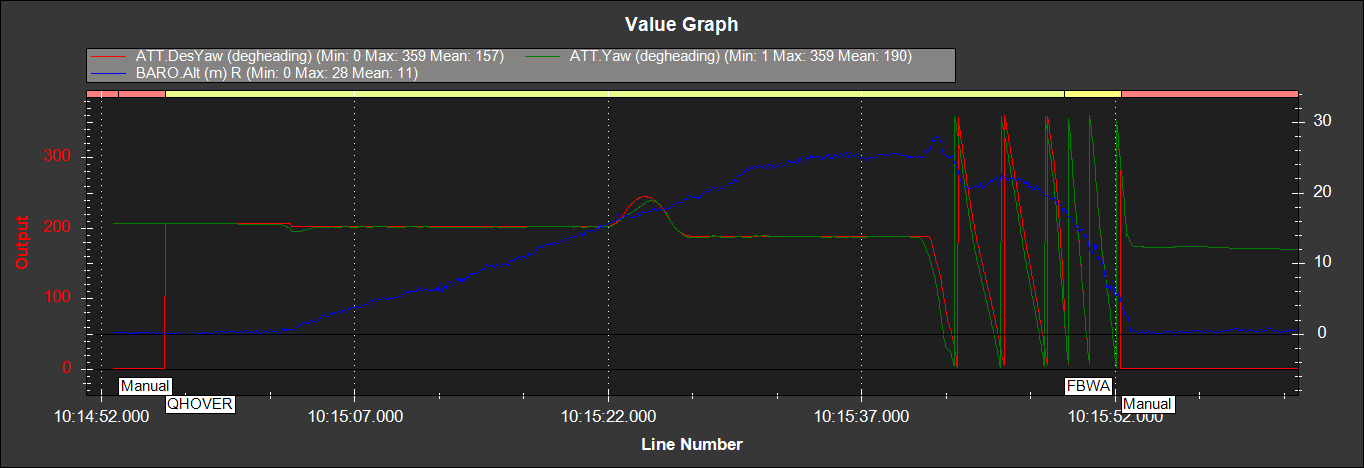
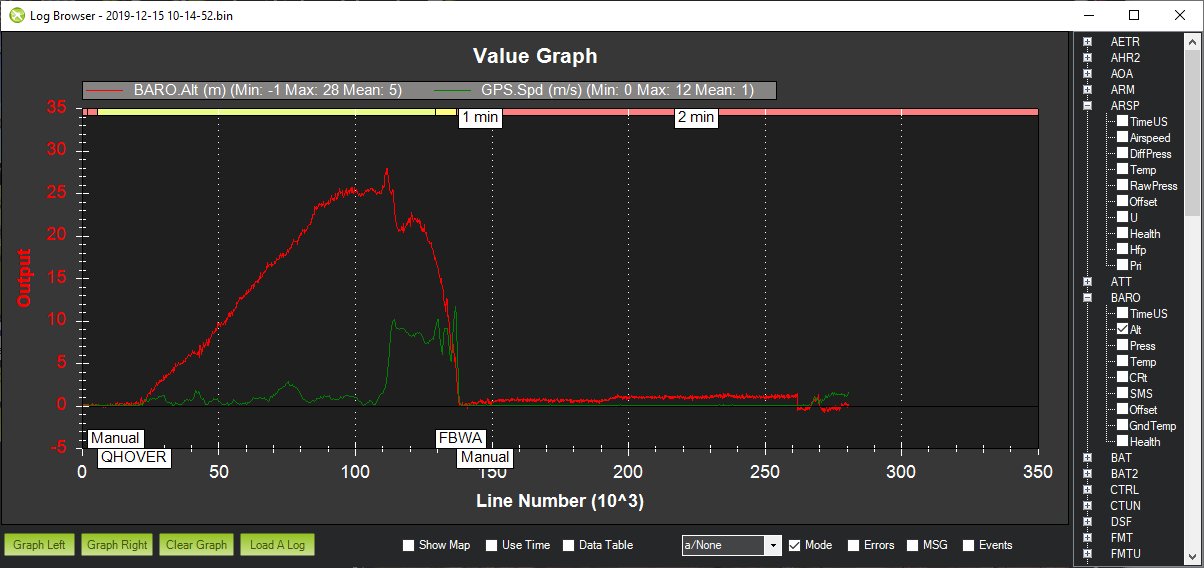
As a turn was started, I was at 30 meters altitude and climbing at a good rate. Halfway thru the turn, I was at 45 meters. By the end of the turn, I was at 20 meters and very close to a tree.
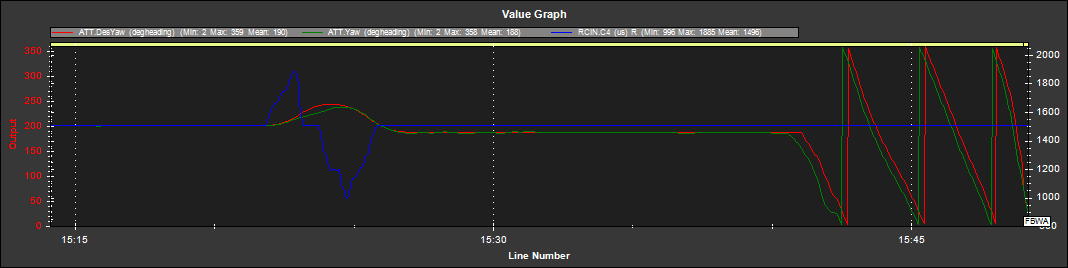
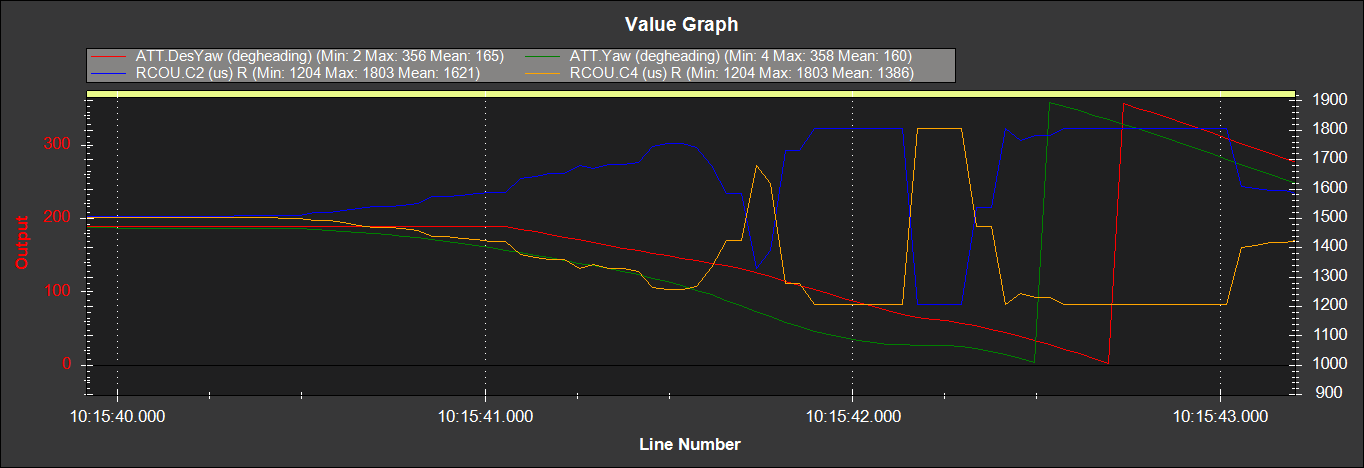
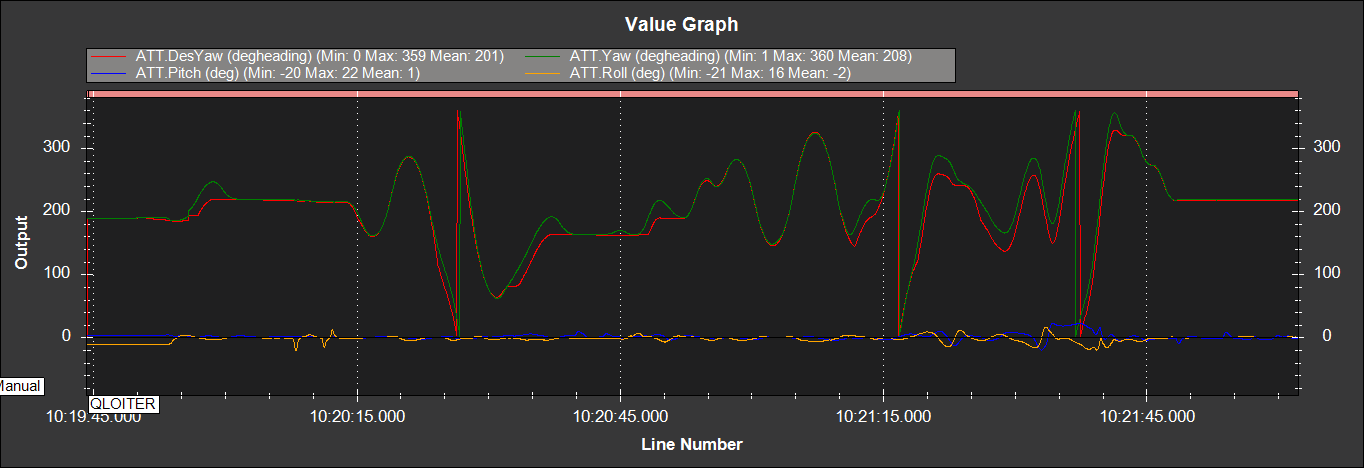
During the 1st half of the turn, desired pitch and actual pitch were about the same. Mostly up at about 8-10%. Just before apogee, the actual pitch falls toward zero and desired pitch increases…briefly at 25%, then 16% falling to ~11% after a couple of seconds. This coincides with input from me on the rudder (edited this to rudder on 1/15-it used to say elevator). Actual pitch bounced around a bit, but averaged around zero until going substantially negative at the last two seconds of the turn (-9.4 degrees at peak). And the plane was losing substantial altitude.
With some input from a friend, I figured out why this happened. The V-Tail is angled at about 45 degrees. This means that when the plane rolls into a turn at 45 degrees, one V-tail surface is perfectly horizontal and one is perfectly vertical. Effectively, one vtail looks like a horizontal stabilizer with an elevator and the other looks like a vertical stabilizer with a rudder.
So…if I power up the servos on my plane, in manual mode and hold it in my hands:
-
With the plane commanded to do a max roll and max pitch up, one vtail banks to horizontal and provides a single surface (of the two vtails) effectively providing full upward elevator deflection. The other vtail looks like a rudder and it is properly deflecting to assist the turn (kicking the aft end out so that the nose points inside the turn).
-
For example, with a turn to left (port) the TX stick is moved to bottom and to left. The ailerons command the roll. The port vtail becomes horizontal and the control surface is an elevator asking for max upward pitch. The right vtail becomes vertical and pushes the aft end of the plane way from the direction of the turn (thus pushing the plane to yaw into the turn). All good so far.
-
When full left rudder is added, the horizontal vtail (port) goes to neutral (no longer calling for any pitch up). The vertical vtail (starboard) doesn’t move from its already deflected position.
Thus, the rudder stick, instead of commanding more yaw becomes an anti-elevator control (when the plane is banked 45 degrees and is commanded to have full pitch up). It does nothing for yaw.
In FBWA mode the behavior is the same.
So, I can see why my attempt to tighten the turn by adding rudder failed (I’d use the term “spectacularly” except that it barely avoided a crash). Adding rudder fully cancels any elevator up pitch and lets the plane head towards the ground.
Is this just an indication that the Vtail for a Mini Talon is just too small (or the control surface on the Vtail) for it to turn well?