I’d like to share my experience so far with a sub 250g Arducopter build I’ve been experimenting with. Since this thread provided inspiration and information, I thought I’d post this here, though this frame is a little larger. Let me know if anyone thinks any discussion should be moved to a new thread.
This is my 4th sub 250g build after years building drones 10 times the weight and I’m quite happy with it, but please, suggest improvements!
33.5 minutes flight time on a 2S Li-ion pack which consumes 2990mAH (measured at charger)
190g All Up Weight
Hovers at 30-50% throttle on 8-5 volts
4K video camera with OSD/FPV transmitter
Reasonably long range control with MAVlink telemetry
GPS/Compass
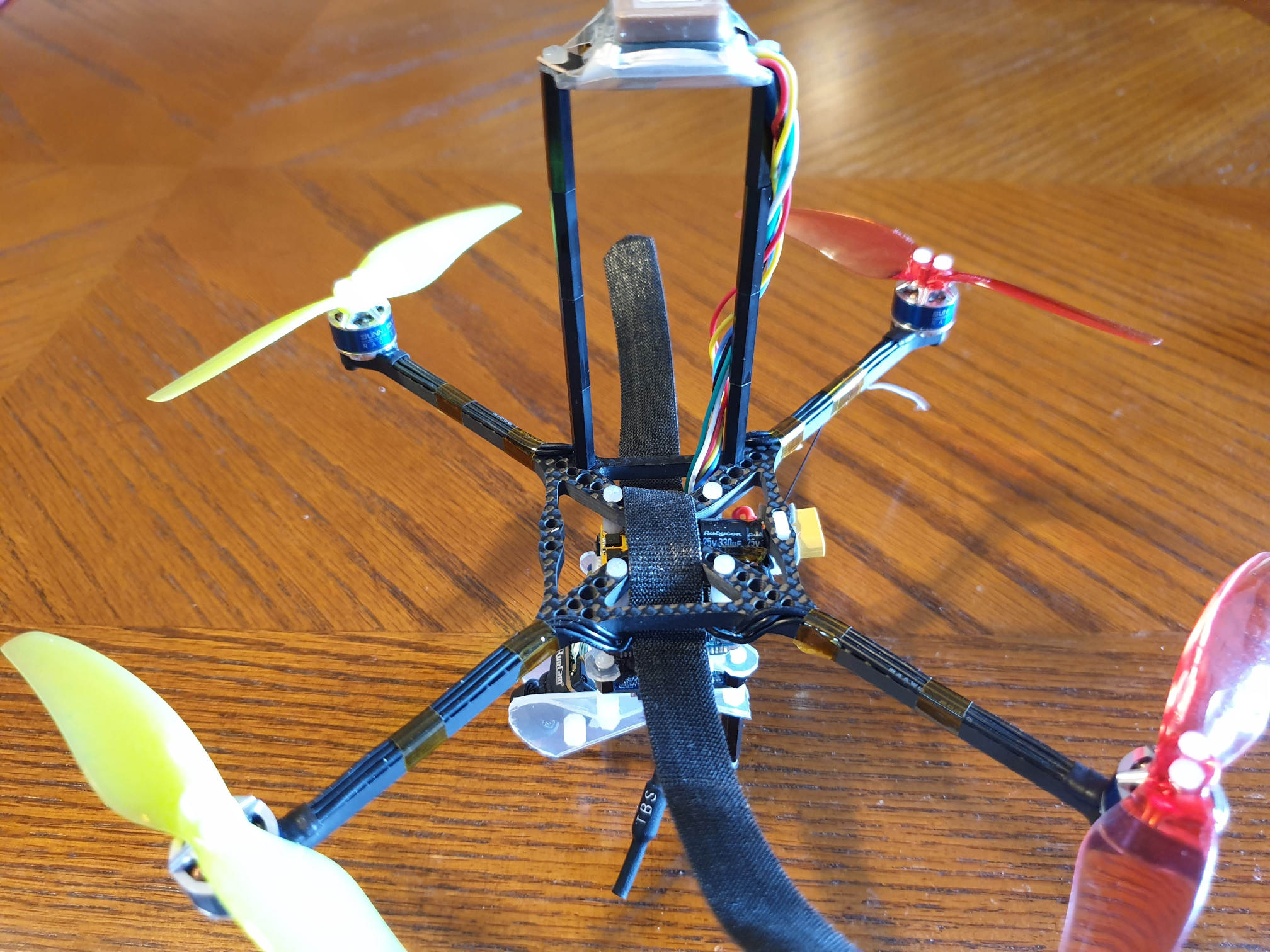
Custom 12g 185mm frame, 4 inch props
Lightweight components are getting a little easier to find thanks to the FPV racing and cinewhoop markets. Here is what I used and some of what I think I’ve learned on the hardware side.
Simple custom designed and cut ~12g 4mm CF frame:
I’ve adjusted frame mounting holes and dimensions on every itteration of my build. Every gram counts, but I wanted flexibility in mounting options. I usually hard mount the FC so vibration is a factor. This frame is quite light but rigid with flexible mounting options. The single peice design reduces vibration. I think the roughly square cross-section and narrow profile of the arms should also minimize drag and reduce vibration, especially in the z axis. The results have been very good in my testing with all axis vibs under 5 m/s/s in normal use. The frame also has a natural path for a simple double sided velcro battery strap. I put the flight stack below and mount the battery on top of the frame. This keeps the electronics away from the GPS which is mounted on a mast. I may countersink screw holes on my next itteration for a flater battery platform. I’ve switched from Armattan to CNCmadness to cut my frames as they provide much faster delivery to the US, but, you can still download my design: https://armattanproductions.com/pages/product_details/26212
SunnySky R1104 5500KV motors:
About 7g each with mounting screws & wire. This motor has a light mount base and 1.5mm prop mount styles, though 5 inch prop selection is very limited.
T-Motor Cinematic F30A 6S BLHeli32 4-in-1 ESC:
I’ve modified it to operate down to about 5 volts. At about 5g, this ESC is more power than I need. I also had good results with a modified Spedix IS20A-4in1. Does anyone know of a lighter BLHeli32 ESC with current measurement?
Gemfan Hurricane 4024 2-Blade Propeller:
About 6g for 4 props. With this motor at 2s, these are the most efficient of the 3-5 inch HQ and Gemfan props I tested.
Matek M8Q-5883 GPS Module w/ Compass:
Lightest and smallest I could find at about 10g, including my mounting. I do wish it had mounting holes which would save a gram. I’ve attached a thin narrow CF plate under it and secured it with heat-shrink around the outside of the assembly. I’ve also used 3M adhesive backed RF absorber (I think it was AB6000HF series) inside the bottom part of the heat-shrink, though I’m not sure it helps much. Initially I mounted the GPS with a single post, but while saving weight, it made me nervous about the possibility of the GPS turning in flight relative to the frame.
TBS Crossfire nano RX:
I really like this receiver, though it’s not quite perfect. I use it with it’s MAVlink telemetry and RC options and connect it with a single full serial port for both Telemetry and RC use. It also controls the power and frequency of the VTX. I use it with the wire-only antenna style which is the lightest weight. I think together, it’s about 1g. There do seem to be some minor bugs with the Bluetooth support in the transmitter module. And I see some issues which may be bugs in the MAVlink emulation/translation mode I’m using. I need to talk to TBS about this. But, full telemetry is nice to have at less than 1g!
TBS Unify Pro Nano 5G8 Video Transmitter:
Nicely integrates with the receiver on the included 20x20 mounting board. Adds about 3g including VTX, antenna and mount for both VTX and RC receiver.
Runcam 4 4K split:
Can’t beat the weight at about 10g. My mount adds about 3g since it doesn’t match the rest of the 20x20 stack. The camera seems to work well in spite of the small sensor. I wish it had the ability to capture stills via a signal wire, but, at 4K, extracting a frame should produce a pretty good image. The image quality is OK with good light, useless after dusk. The 25 in the model number gives me hope they might make a 20x20 version someday.
Airbot Omnibus Nano V6 flight controller:
About 6g. The Nano V6.1 adds current measurement, but my sample had a defective OSD and I’m waiting for a replacement. The V6.1 also requires changes to the hwdef. I note that some here have reported that the Omnibus Nano is noisy and degrades GPS so I have ordered a Kakute F7 mini V2 to try. It seems the Kakute V2 are already getting hard to find, though, having been replaced by a cost-reduced V3 which we can’t use.
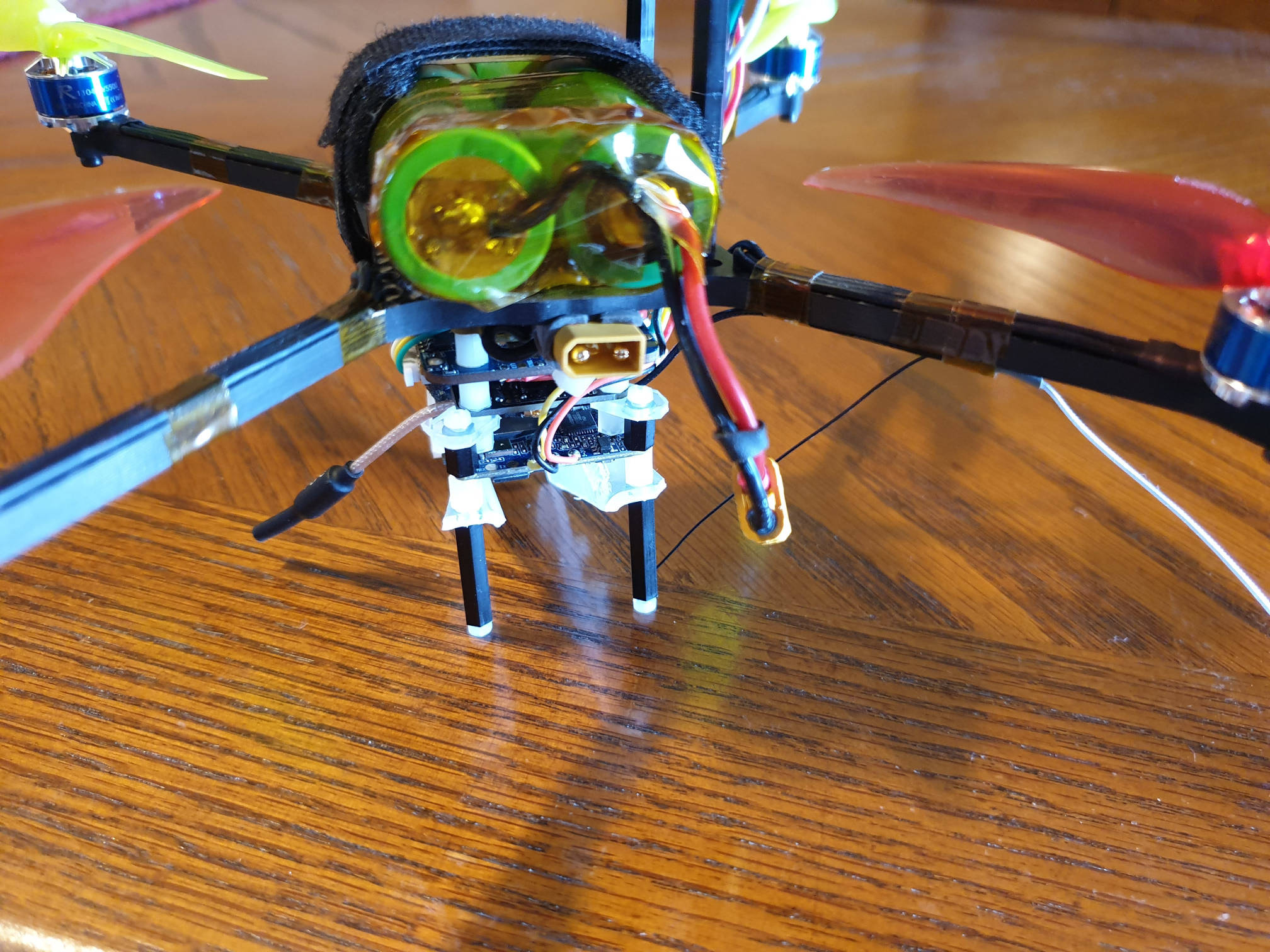
Sony/Murata VTC6 18650 3000mAh 15A Batteries:
Assembled with a spot welder into a 2S pack. 97g with velcro, wire and xt30 connector. To save a tiny bit of weight, I didn’t include a balance connector. Instead, I clip a lead to the welded strip to provide the center tap when charging. Note that this is a little over half of the 190g flight weight. I suspect newer generation batteries might perform better. Any recommendations?
I use a powerful degausser left over from the days of 9 track computer tapes to eliminate any magnetic polarization in the battery cans after assembly. Move the pack around in the 60Hz magnetic field and then increase the distance slowly to several feet away before turning the unit off. Then keep magnetized tools and transformers away from packs. Leave your credit cards in the other room! It’s easy for the cells to become slightly magnetized during manufacturing, soldering, or welding. Of course, they still should be mounted well clear of the compass.
Interestingly, when I mount the two cell Li-ion battery pack flat on the top of the frame, GPS performance improves significantly. I suspect the metal cans are acting as an RF shield and blocking noise from the ESC, FC, radios, and camera stacked below. When I mounted the battery pack on it’s edge to allow for testing 5 inch props, the GPS was glitching so much I had to fly my hover time test in altitude hold rather than loiter mode. Luckily, the 5 inch props didn’t perform as well as the 4 inch props with my motors so I can deal with RF noise later.

XT30 connector:
It seems trivial, but I really like this battery connector for it’s light weight and reasonable current capability. I also like what I’ve done with it on this frame. I drill a small hole in the connector and use a bit of double sided foam tape and a small zip tie to affix it firmly to the frame. A nylon screw should also work. This allows the wire connecting it to the flight controller to be very short and light. It also eliminates stress on the wire, ESC pads, and solder joints when connecting and disconnecting the battery. Placing the battery near the ESC also allows the battery wires to be short and light. If space is too tight between the ESC and frame mounting holes for the XT30, I grind off the extended part of the solder tabs on the XT30 and use just the holes for the solder and wire small enough guage to just fit in the holes.
M2 Nylon screws, zip ties and standoffs:
Everywhere except motor mount. Cheap, light, and easy to trim to length. Uniform and correct prop screw length is critical. I also cut and heat formed some 1.8mm plastic from a storage container to hold the camera and to adapt the 25.5x25.5 mount. I may 3d print replacements later. I haven’t weighed all the mounting hardware separately, but it must be a significant part of the total. There is probably room for weight reduction, especially in the camera mount. Loctite 425 works well on both metal and plastic screws.
Landing Gear:
I can’t aford the weight for real landing gear, but the camera mount and a couple extra standoffs form a narrow tripod with screws to fine tune level before calibration.
Gimbal:
Nope. Not yet. But the cable to the sensor module of the Runcam 4 4k split is almost flexible enough that I think a very light gimbal could be built for it. Another 30-60g would allow about 20 minutes of flight time and still be under 250g. Who is up for the challenge?
I also plan to test these motors on 3S which is the lowest voltage they were intended to run with. I still have some headroom under the 250g limit. Perhaps I can get a little more flight time. Sorry if this got more than a little long.
–Brad