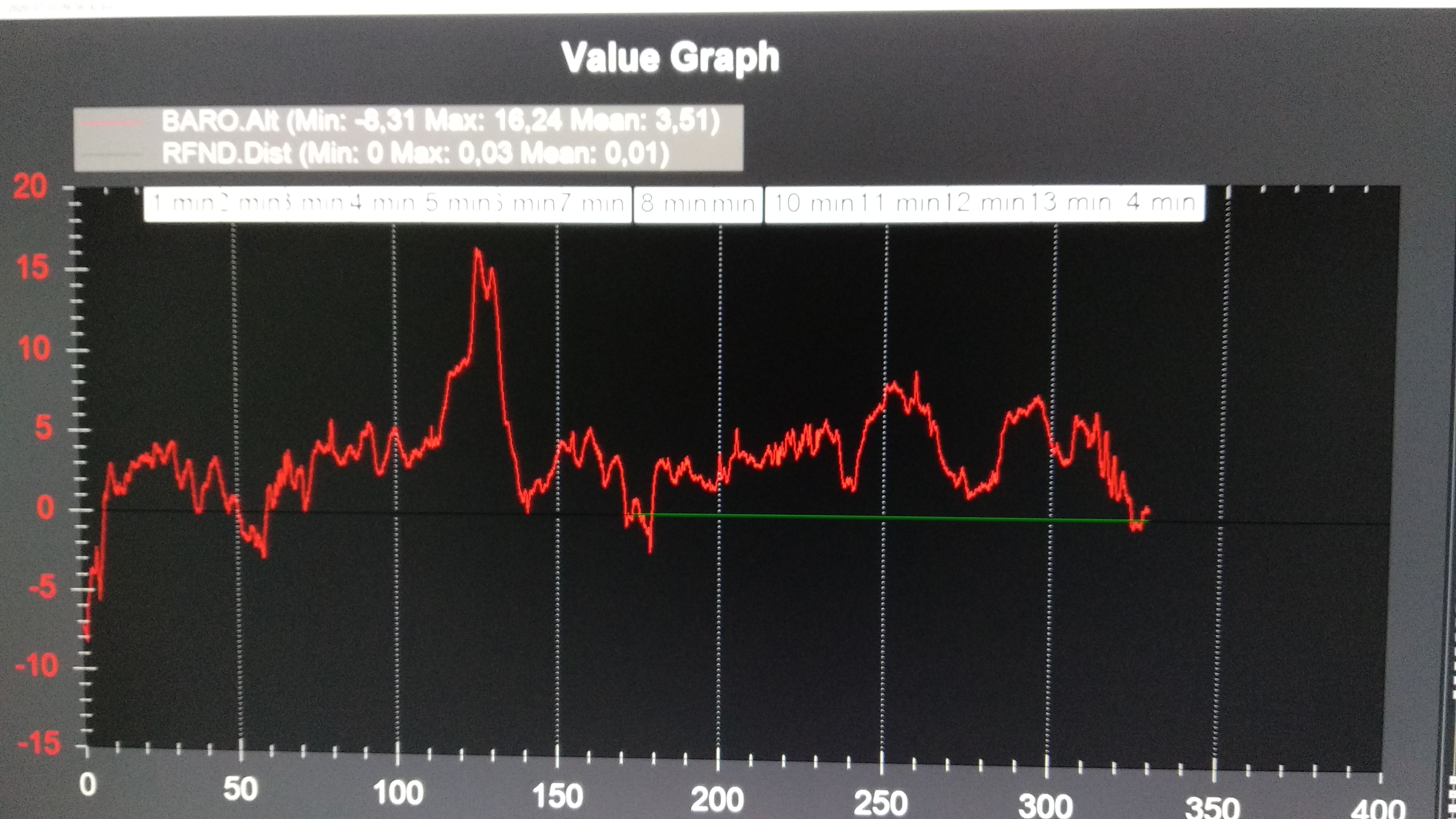
on my 3 "quad with optical flow I connected the lidar VL53L1X and the test seems to provide a correct reading but in flight it seems not to work well and the behavior of the quad is better with only the optical flow. I followed the wiki instructions. I get bad lidar health only with the quad resting on the ground and the sonar range value at 0. if I manually raise the quad the height seems correct.in the log I get only 0.3 actually the quad has reached 15 meters … I don’t understand.